
一种快速终端滑模阻抗控制算法.pdf

是翠****ng


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种快速终端滑模阻抗控制算法.pdf
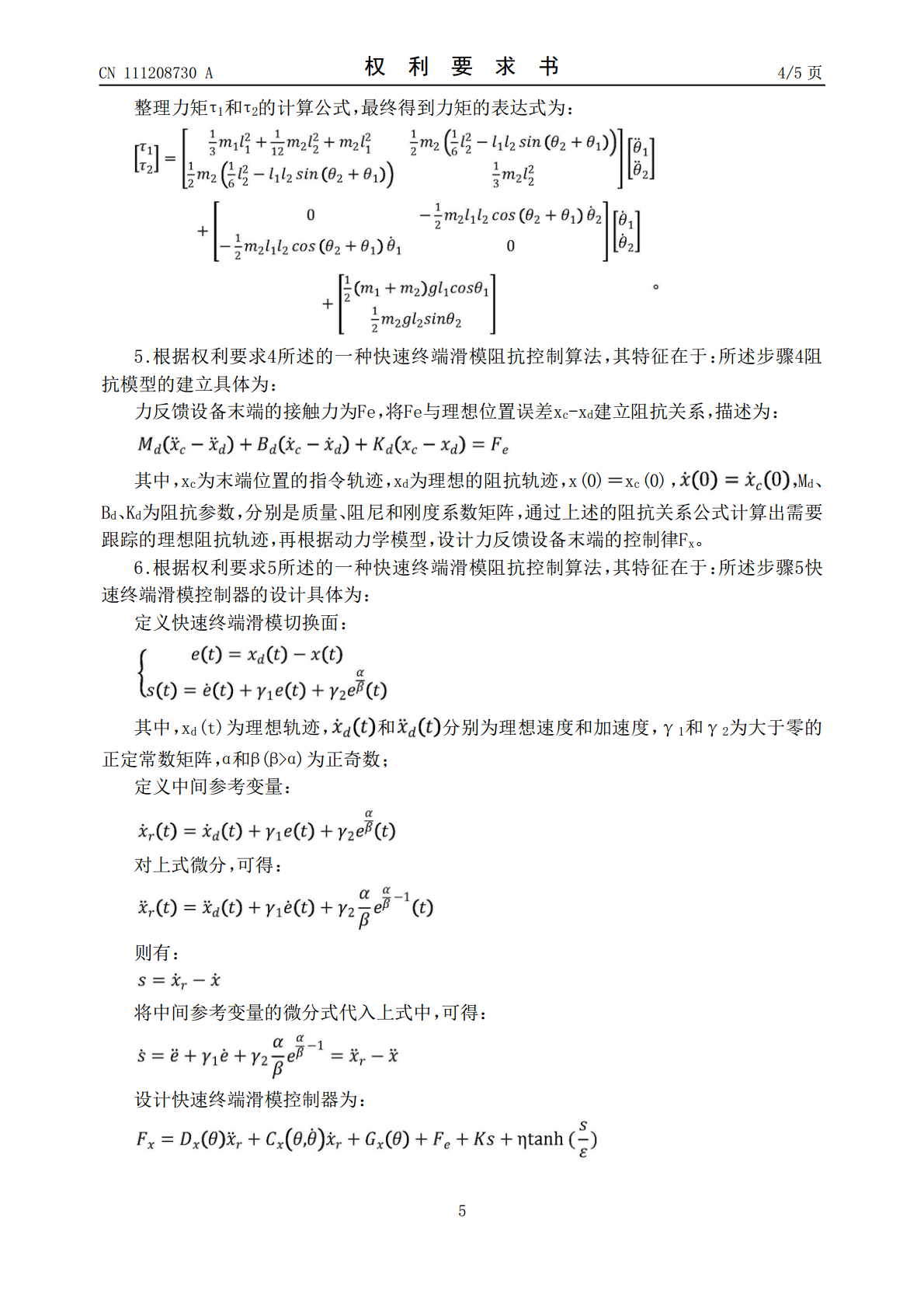
本发明提供了一种快速终端滑模阻抗控制算法。主要包括以下步骤:步骤1,将力反馈设备简化为双连杆模型;步骤2,求解简化模型的运动学;步骤3,求解简化模型的动力学;步骤4,建立阻抗模型;步骤5,设计快速终端滑模控制器。本发明的优点在于:一、引入了终端吸引子,保证了系统状态能够在有限时间内收敛到平衡点;二,保留了线性滑模控制部分,因此具有在平衡点附近快速收敛的特点。快速终端滑模阻抗控制使系统状态能够快速、精准的收敛到平衡点。与滑模阻抗控制算法相比,快速终端滑模阻抗控制具有更小的位置跟踪误差。

一种连续非奇异快速终端滑模控制方法.docx
一种连续非奇异快速终端滑模控制方法导言随着科学技术的发展,在控制领域,滑模控制已经成为一种重要的非线性控制方法之一。它可以通过快速和准确的控制系统构建来应对各种复杂的控制问题,同时控制效果也比传统控制方法更优秀。近年来,快速终端滑模控制被广泛研究和应用,能够应对系统的动态变化,提高系统鲁棒性和响应速度。本文将介绍一种连续非奇异快速终端滑模控制方法,通过详细的理论阐述和实验验证,证明该方法在实际应用中具有很好的效果。快速终端滑模控制方法快速终端滑模控制是一种基于非线性滑模控制的改进方法,它充分利用快速终端滑

一种基于快速终端滑模的蜂群无人机容错协同控制方法.pdf
本申请公开了一种基于快速终端滑模的蜂群无人机容错协同控制方法,涉及无人机技术领域,该方法基于固定翼无人机的位置跟踪误差设计得到非奇异快速终端滑模面,再结合固定翼无人机的动力学模型引入包含故障相关项和外界扰动项的总未知项和命令控制输入信号,从而构建得到固定翼无人机的容错控制律,利用基于快速终端滑模设计得到的容错控制律对蜂群无人机进行容错协同控制,在无人机遭遇执行器故障或外界扰动时仍然可以保持蜂群无人机的稳定飞行,还使得各无人机可以对期望位置进行编队跟踪,在蜂群无人机的编队协同容错控制上具有很好的实际意义和应

基于自适应快速终端滑模的车轮滑移率跟踪控制.docx
基于自适应快速终端滑模的车轮滑移率跟踪控制基于自适应快速终端滑模的车轮滑移率跟踪控制摘要:随着汽车工业的发展,对于车轮滑移率的控制成为了关键的研究领域。本文提出了一种基于自适应快速终端滑模的车轮滑移率跟踪控制方法。该方法能够通过对车辆动力学模型的建立,实现对车轮滑移率的准确测量,并通过自适应控制策略来实现滑移率的跟踪控制。实验结果表明,该方法能够有效地减小车轮滑移率,提高车辆的操控性和行驶安全性。关键词:车轮滑移率,自适应控制,快速终端滑模,车辆动力学模型引言:车轮滑移率的控制对于汽车的操控性和行驶安全性

一种机械臂终端滑模控制方法.docx
一种机械臂终端滑模控制方法论文:一种基于机械臂终端滑模控制的方法摘要:机械臂广泛应用于工业自动化领域,实现对各种工业操作的高效自动化。控制机械臂的终端位置对于其操作精度和准确性至关重要。本论文旨在提出一种基于机械臂终端滑模控制的方法,以实现对机械臂终端位置的精确控制。该方法结合滑模控制理论,通过引入滑模面和滑模控制律,将机械臂终端位置控制问题转化为滑模面到达问题。通过仿真实验验证,该方法能够实现对机械臂终端位置的快速、精确控制。关键词:机械臂,终端滑模控制,滑模控制律,滑模面1.引言机械臂广泛应用于各种工