
汽车磁流变半主动悬架控制系统设计.pdf

as****16


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
汽车磁流变半主动悬架控制系统设计.pdf
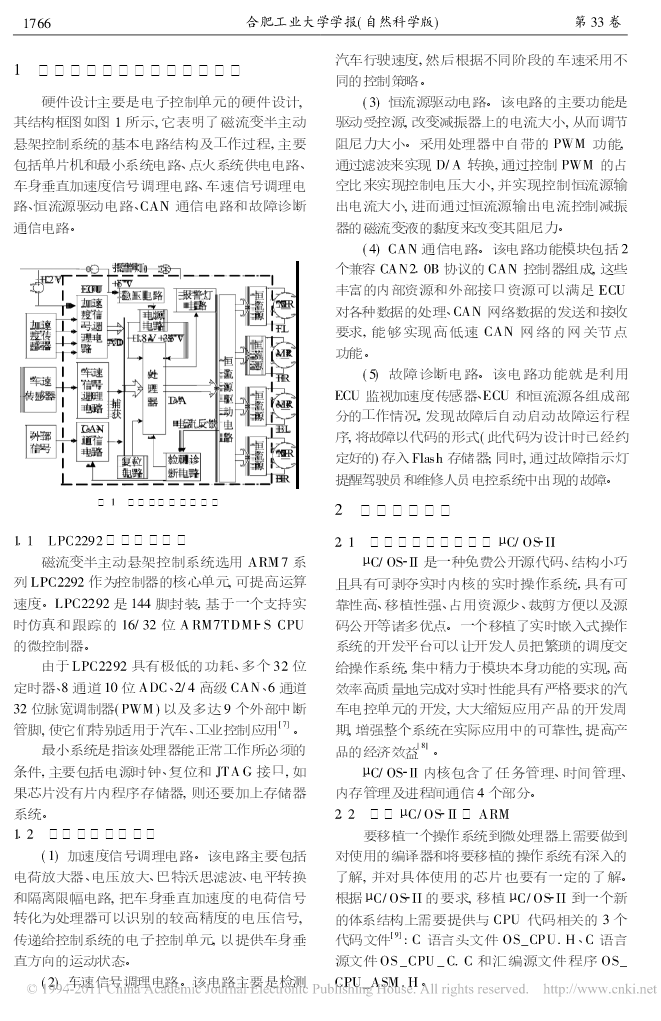
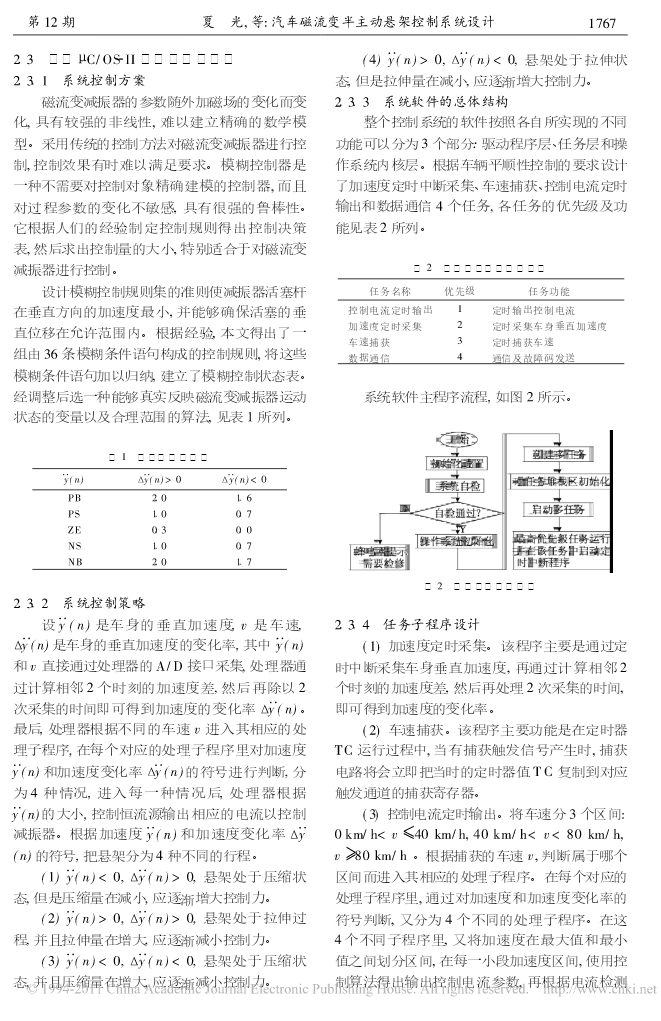
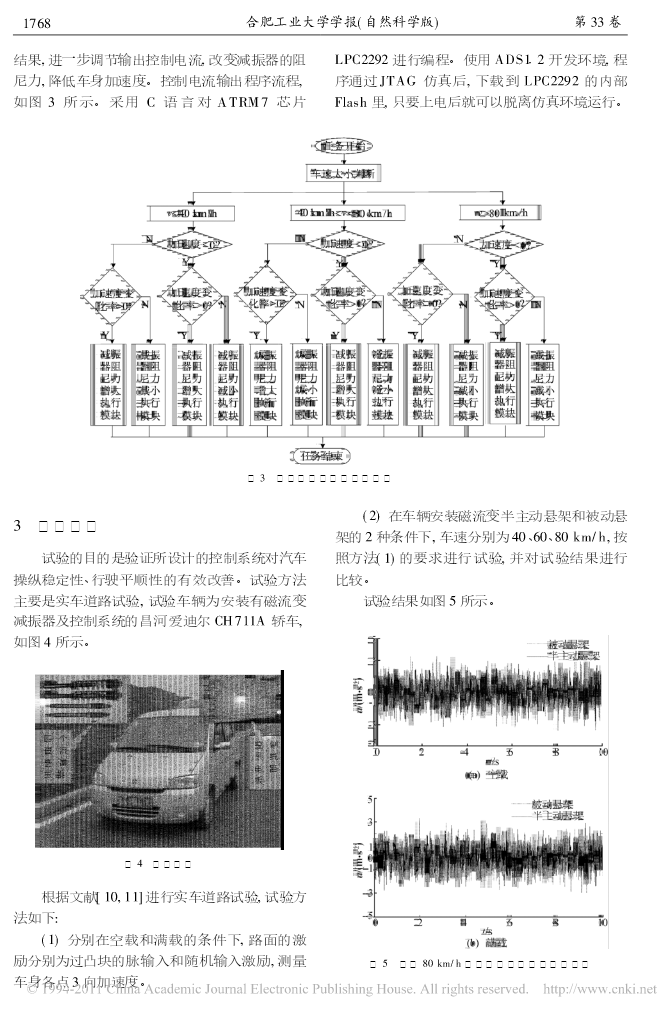
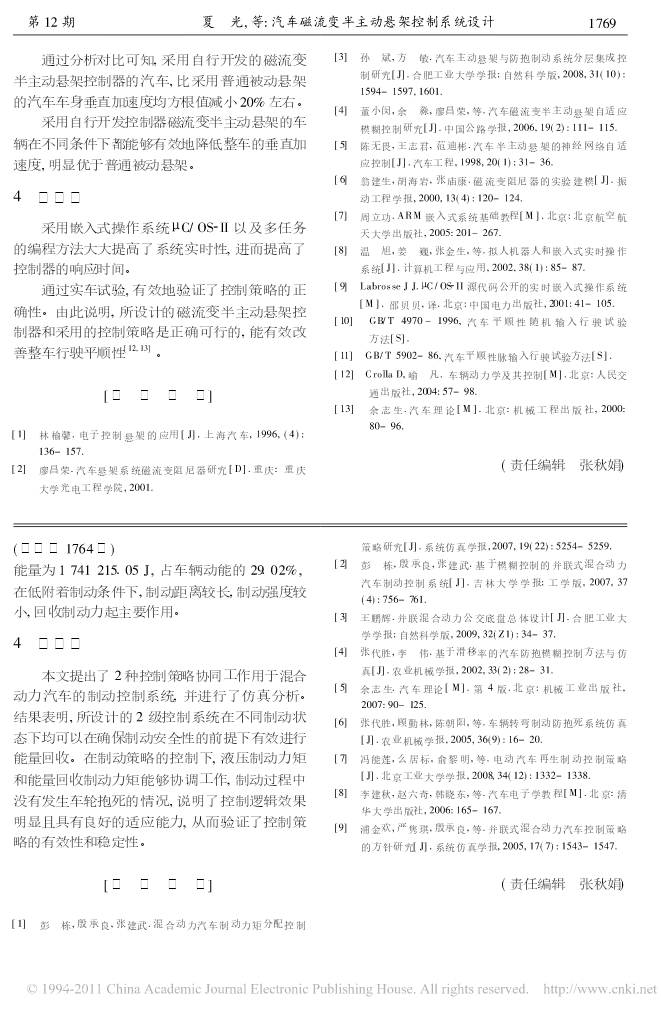
�第33卷第12期合肥工业大学学报(自然科学版)Vol.33No.12��2010年12月JOURNALOFHEFEIUNIVERSITYOFTECHNOLOGYDec.2010�Doi:10.3969/j.issn.1003�5060.2010.12.002汽车磁流变半主动悬架控制系统设计夏�光1,2,�唐希雯3,�汪韶杰1,�孙保群1(1.合肥工业大学汽车工程技术研究院,安徽合肥�230009;2.合肥工业大学机械与汽车工程学院,安徽合肥�230009;3.解放军电子工程学院信息工程系,安徽合肥�23

汽车磁流变半主动悬架控制系统研究.docx
汽车磁流变半主动悬架控制系统研究引言随着汽车行业的发展和进步,人们对于汽车悬架的性能和舒适度要求也越来越高。磁流变半主动悬架技术便是为此而开发的一种新技术,它可以在一定程度上平衡动态稳定性、舒适性和操控性。本文旨在探讨汽车磁流变半主动悬架控制系统的研究及其应用现状。一、磁流变半主动悬架的原理磁流变半主动悬架是通过改变汽车悬架中的磁流变流体的性质,来改变悬架的阻尼特性。磁流变流体是一种可以通过外加磁场改变自身流变特性的液体。在磁场作用下,磁流变流体的颗粒会产生排列,使其粘度和流变特性发生变化,从而实现对阻尼

基于磁流变阻尼器的汽车悬架半主动控制系统设计.docx
基于磁流变阻尼器的汽车悬架半主动控制系统设计基于磁流变阻尼器的汽车悬架半主动控制系统设计摘要:随着汽车工业的高速发展,人们对车辆悬架系统的性能要求越来越高,希望能够提高悬架的舒适性和稳定性。而磁流变阻尼器作为一种新型的半主动控制元件,具有调节范围广、响应速度快、控制精度高等优点,因此成为了现代汽车悬架系统中的重要组成部分。本文针对基于磁流变阻尼器的汽车悬架半主动控制系统进行了深入研究,并设计了相应的控制策略,通过数值仿真分析验证了所设计系统的有效性。关键词:汽车悬架系统;磁流变阻尼器;半主动控制;数值仿真

汽车磁流变半主动悬架控制系统研究的开题报告.docx
汽车磁流变半主动悬架控制系统研究的开题报告1.研究背景汽车悬架系统是连接车身和轮胎的重要组成部分,它对汽车舒适性、操控性和安全性等方面都有着重要的影响。随着汽车技术的不断发展,传统悬架系统已经不能满足现代汽车多样化的悬架需求。磁流变半主动悬架系统因其可以根据路况、车速等多方面参数进行实时调节,而获得了广泛的研究和应用。本文旨在研究汽车磁流变半主动悬架控制系统的原理、控制方法和应用,进一步提高汽车悬架系统的性能和安全性。2.研究内容(1)磁流变半主动悬架系统的基本原理和结构。(2)磁流变流体的物理特性及其对

汽车磁流变半主动悬架减振器及控制方法.pdf
本发明涉及车辆悬架领域,提供一种汽车磁流变半主动悬架减振器包括活塞杆、底阀组件、活塞组件、减振器本体、控制模块,减振器本体为中空管状同轴地内套有内筒,减振器本体与内筒之间形成有储液腔,其一端与汽车车轮固定连接,另一端与汽车车架连接,底阀组件固定设置在减振器本体靠近汽车车轮的一端,活塞组件设置在减振器本体内,活塞组件可自由沿所述内筒轴线方向滑动,内筒内壁设置有导轨,活塞组件朝远离底阀组件的一端与活塞杆连接,储液腔与内筒内部充满磁流变液,不仅结构紧凑、简单,且改善减振器内部阻尼特性,本发明同时应用了一种基于此