
一种四轴车床加工轨迹轮廓误差离线补偿方法.pdf

佳晨****ng


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四轴车床加工轨迹轮廓误差离线补偿方法.pdf
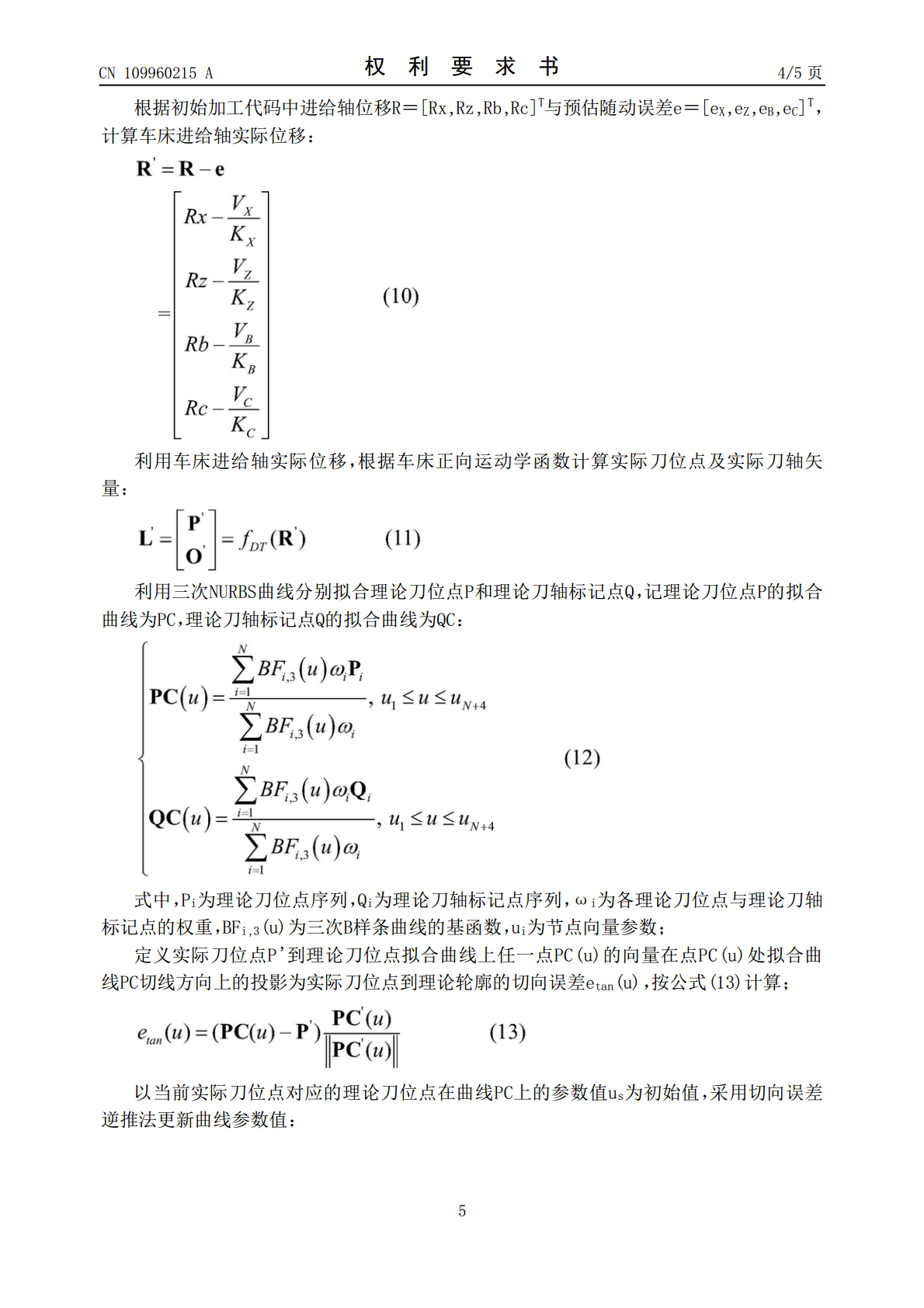
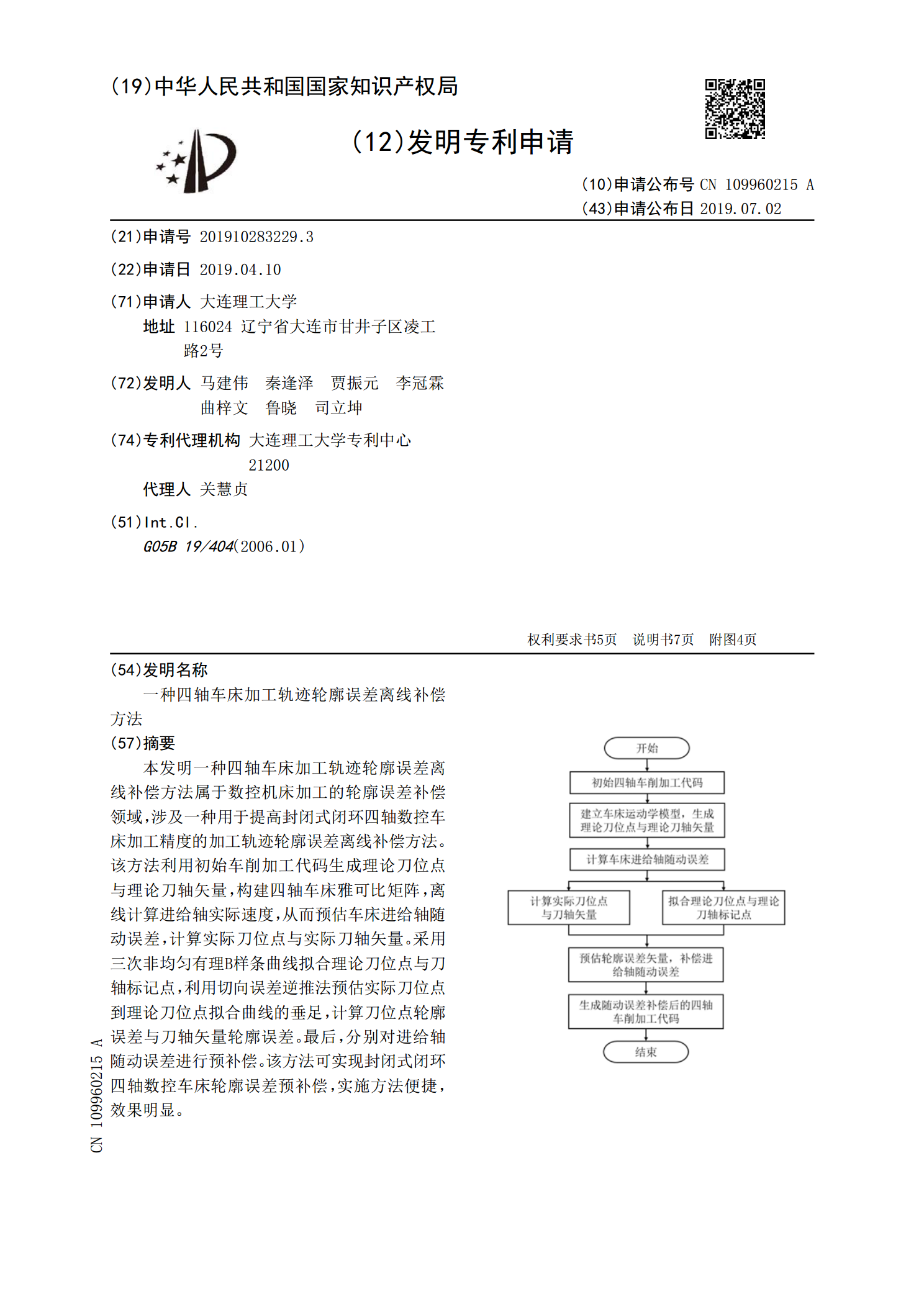
本发明一种四轴车床加工轨迹轮廓误差离线补偿方法属于数控机床加工的轮廓误差补偿领域,涉及一种用于提高封闭式闭环四轴数控车床加工精度的加工轨迹轮廓误差离线补偿方法。该方法利用初始车削加工代码生成理论刀位点与理论刀轴矢量,构建四轴车床雅可比矩阵,离线计算进给轴实际速度,从而预估车床进给轴随动误差,计算实际刀位点与实际刀轴矢量。采用三次非均匀有理B样条曲线拟合理论刀位点与刀轴标记点,利用切向误差逆推法预估实际刀位点到理论刀位点拟合曲线的垂足,计算刀位点轮廓误差与刀轴矢量轮廓误差。最后,分别对进给轴随动误差进行预补
面向圆柱凸轮加工的三轴联动轮廓误差补偿控制方法.pdf
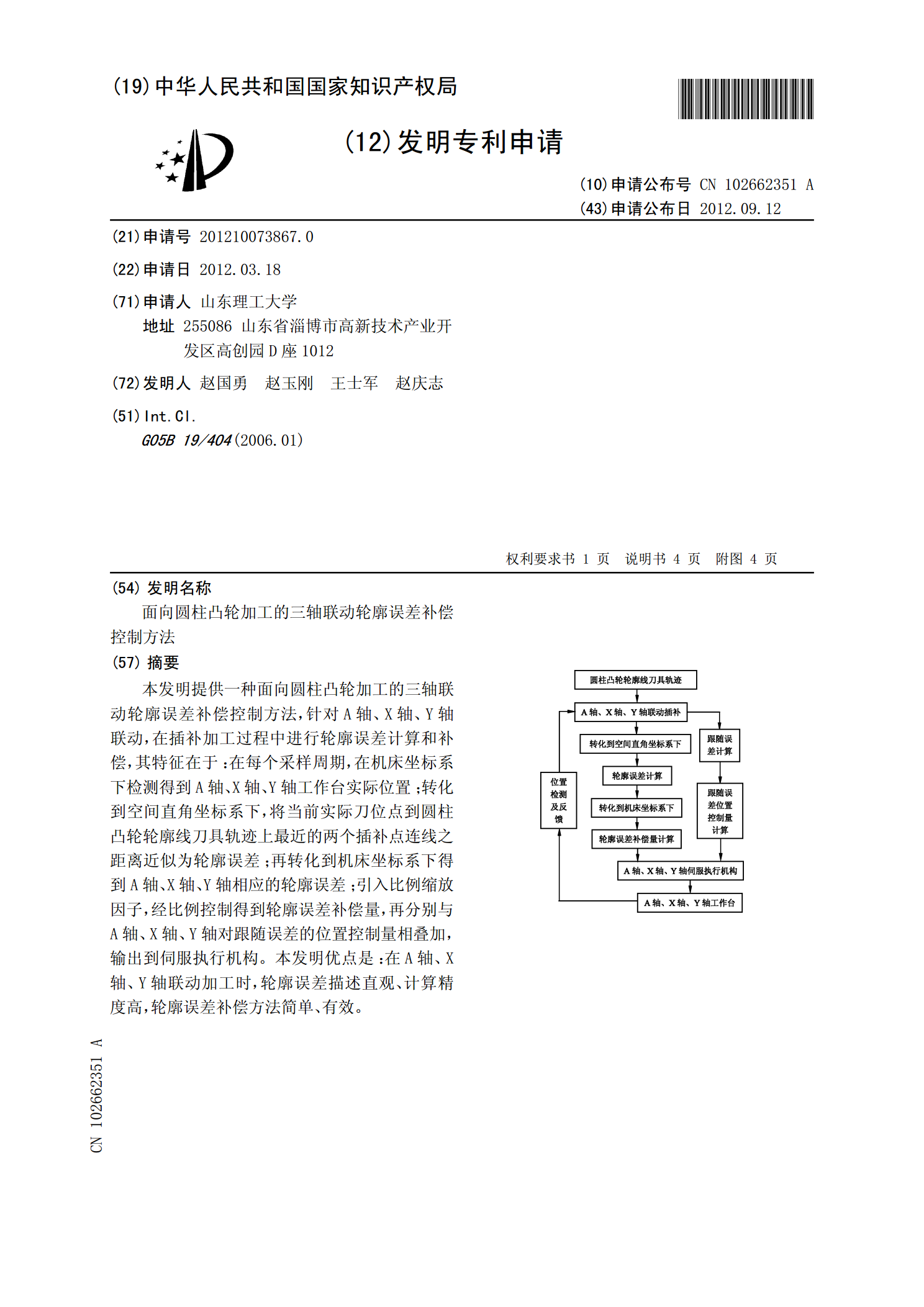
本发明提供一种面向圆柱凸轮加工的三轴联动轮廓误差补偿控制方法,针对A轴、X轴、Y轴联动,在插补加工过程中进行轮廓误差计算和补偿,其特征在于:在每个采样周期,在机床坐标系下检测得到A轴、X轴、Y轴工作台实际位置;转化到空间直角坐标系下,将当前实际刀位点到圆柱凸轮轮廓线刀具轨迹上最近的两个插补点连线之距离近似为轮廓误差;再转化到机床坐标系下得到A轴、X轴、Y轴相应的轮廓误差;引入比例缩放因子,经比例控制得到轮廓误差补偿量,再分别与A轴、X轴、Y轴对跟随误差的位置控制量相叠加,输出到伺服执行机构。本发明优点是:
一种数控加工中轮廓误差的补偿方法.pdf
本发明属于数控相关技术领域,其公开了一种数控加工中轮廓误差的补偿方法,该补偿方法包括以下步骤:(1)获取加工工件的轮廓误差值,并基于得到的所述轮廓误差值计算得到各轴的误差补偿量,继而生成工件误差补偿表;其中,所述工件误差补偿表包括机床加工过程中各进给轴方向上的补偿点位置及对应的补偿量;(2)数控系统基于加工工件补偿前的加工G代码及所述工件误差补偿表计算得到补偿后的控制指令序列,进而在加工控制的插补过程中实现加工工件轮廓误差的动态补偿。本发明在非加工状态下生成对应加工工件轮廓的工件误差补偿表,并基于工件误差

一种自由轮廓曲面铣削加工的让刀误差补偿方法.pdf
一种自由轮廓曲面铣削加工的让刀误差补偿方法,属于铣削加工制造技术领域。其特征是通过规划半精加工的刀具轨迹,优化精加工的加工余量,使得精加工过程中法向等效接触切削力保持恒定,进而保持法向让刀误差恒定。让刀误差通过法向等距偏置精加工刀具轨迹实现补偿。加工余量优化考虑了自由轮廓曲面加工过程中刀具的实际切削进给速度和切触角的变化。本发明的效果和益处是实现方法简单可靠,无需繁琐的测量和迭代计算,可以模块化实现,易于形成软件产品。
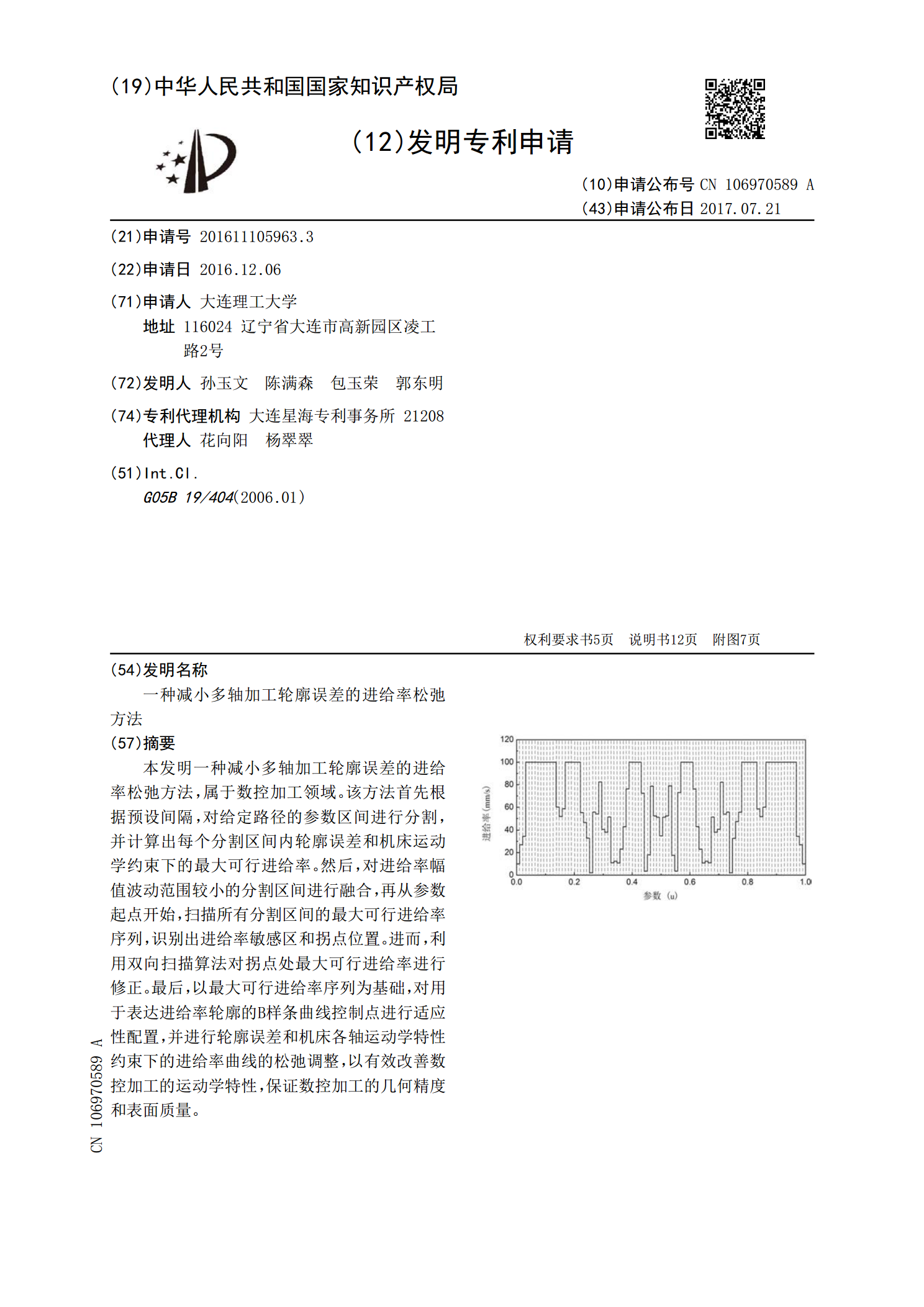
一种减小多轴加工轮廓误差的进给率松弛方法.pdf
本发明一种减小多轴加工轮廓误差的进给率松弛方法,属于数控加工领域。该方法首先根据预设间隔,对给定路径的参数区间进行分割,并计算出每个分割区间内轮廓误差和机床运动学约束下的最大可行进给率。然后,对进给率幅值波动范围较小的分割区间进行融合,再从参数起点开始,扫描所有分割区间的最大可行进给率序列,识别出进给率敏感区和拐点位置。进而,利用双向扫描算法对拐点处最大可行进给率进行修正。最后,以最大可行进给率序列为基础,对用于表达进给率轮廓的B样条曲线控制点进行适应性配置,并进行轮廓误差和机床各轴运动学特性约束下的进给