
一种床椅一体化机器人及其合体、分离方法.pdf

映雁****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种床椅一体化机器人及其合体、分离方法.pdf
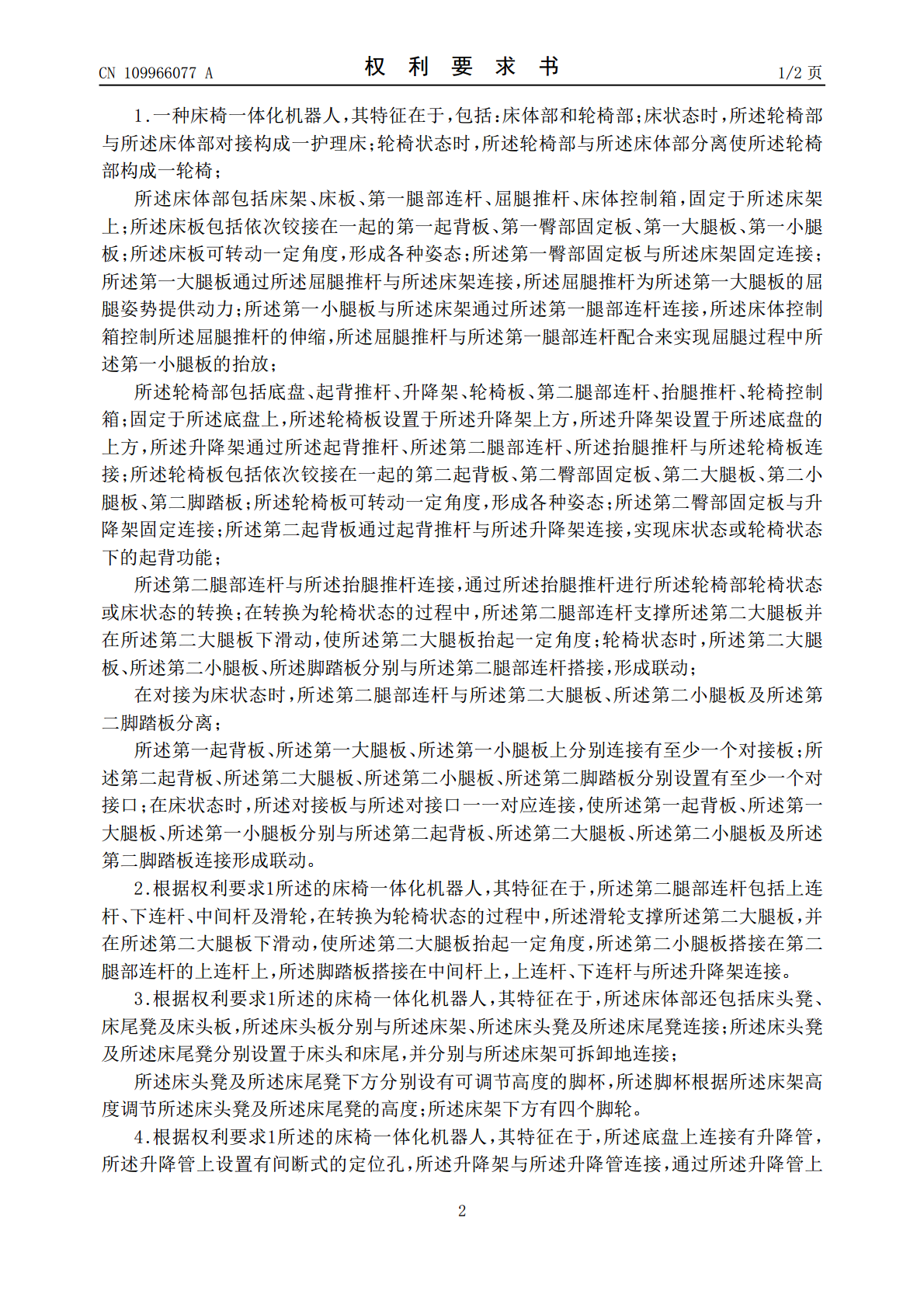
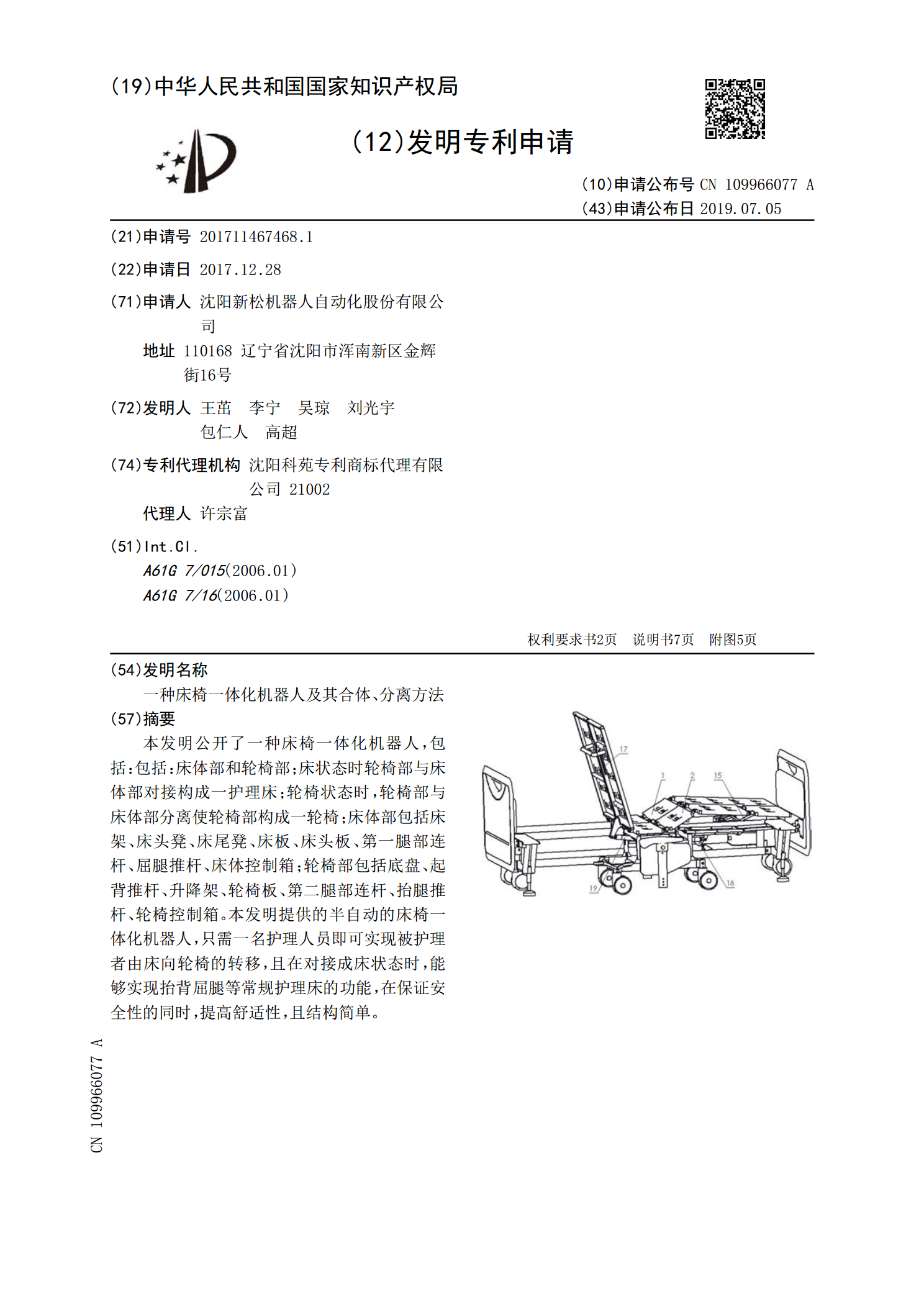
本发明公开了一种床椅一体化机器人,包括:包括:床体部和轮椅部;床状态时轮椅部与床体部对接构成一护理床;轮椅状态时,轮椅部与床体部分离使轮椅部构成一轮椅;床体部包括床架、床头凳、床尾凳、床板、床头板、第一腿部连杆、屈腿推杆、床体控制箱;轮椅部包括底盘、起背推杆、升降架、轮椅板、第二腿部连杆、抬腿推杆、轮椅控制箱。本发明提供的半自动的床椅一体化机器人,只需一名护理人员即可实现被护理者由床向轮椅的转移,且在对接成床状态时,能够实现抬背屈腿等常规护理床的功能,在保证安全性的同时,提高舒适性,且结构简单。

一种自动分离对接的床椅一体化机器人.pdf
本发明涉及医疗护理保健器械领域,具体涉及一种自动分离对接的床椅一体化机器人,包括床体部分和轮椅部分,所述床体部分包括床体整体框架、床体背部框架、床体曲腿结构框架,所述床体背部框架上装有左侧翻身框架和抬背联动机构;所述轮椅部分包括全方位移动底盘,所述全方位移动底盘安装有激光导航装置、巡线导航装置中的至少一种,所述床体部分配合全方位移动底盘安装有对应的定位装置;本发明能够实现作为护理床的卧姿调整、翻身功能,同时能够实现轮椅与床体部分的自动分离、对接功能。另外通过联动机构实现部分运动机构的同步联动,精简了驱动装
床椅一体化护理床及床椅对接方法.pdf
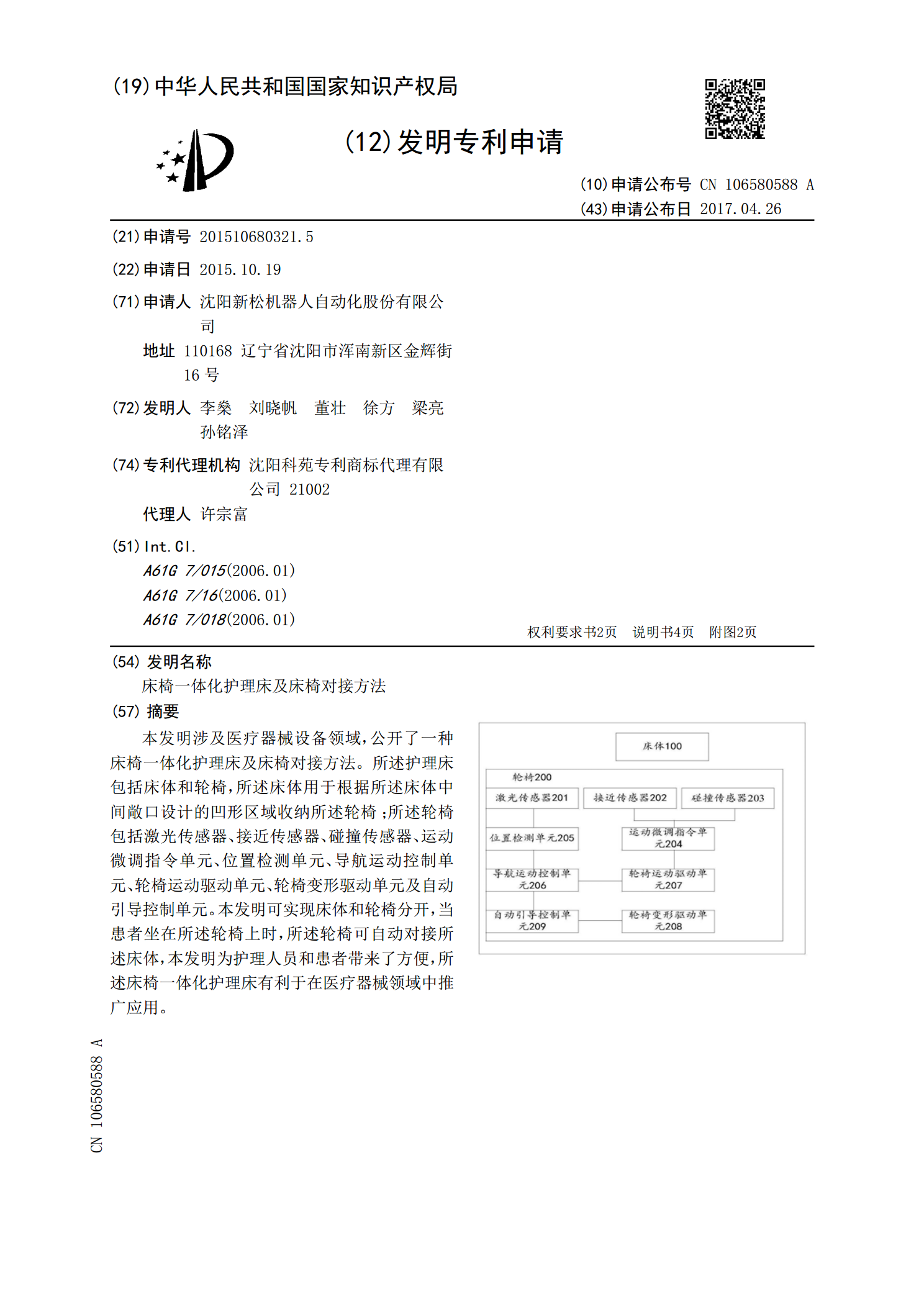
本发明涉及医疗器械设备领域,公开了一种床椅一体化护理床及床椅对接方法。所述护理床包括床体和轮椅,所述床体用于根据所述床体中间敞口设计的凹形区域收纳所述轮椅;所述轮椅包括激光传感器、接近传感器、碰撞传感器、运动微调指令单元、位置检测单元、导航运动控制单元、轮椅运动驱动单元、轮椅变形驱动单元及自动引导控制单元。本发明可实现床体和轮椅分开,当患者坐在所述轮椅上时,所述轮椅可自动对接所述床体,本发明为护理人员和患者带来了方便,所述床椅一体化护理床有利于在医疗器械领域中推广应用。

床的合体方法、床的分离方法及床.pdf
一种使轮椅(13)与床主体部(12)的床侧基座部(23)的凹部(23a)合体而形成用于供人躺卧的床(11)的床的合体方法,在轮椅的座面部(31)的形状为椅子形状的状态下,利用倾倒动作从椅子姿势改变为脚踏部的位置比基座部高的座面部倾斜了的倾倒姿势,使轮椅移动到基座部的凹部内,使座面部从倾倒姿势改变为非倾倒姿势。

床以及床的合体方法和分离方法.pdf
一种将轮椅(9)和床主体部(10)合体而成的床(11),轮椅(9)具有以自由弯曲的方式连结多个分割构件而构成的座面部(15)、对座面部(15)进行支承的椅子支承构件(14)、对椅子支承构件(14)进行固定的椅子基座部(13)和对椅子基座部(13)进行支承的行走轮(12),床主体部(10)具有以自由弯曲的方式连结多个分割构件而构成的床面部(17)、对床面部(17)进行支承的床面支承构件(18)和对该床面支承构件(18)进行固定的床基座部(19),在轮椅(9)和床主体部(10)合体的情况下,对座面部(15)进