
一种利用磁性吸附的轮式管道检测机器人.pdf

文阁****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种利用磁性吸附的轮式管道检测机器人.pdf
本发明公开了一种利用磁性吸附的轮式管道检测机器人,包括摄像头云台、控制机构、辅助光源、下井托架、磁力传动轮装置,本发明利用设有的磁吸附装置对可导磁管道壁进行磁吸作用,通过励磁线圈与可逆磁钢的磁性引导,使得磁钢与磁极产生磁现象释放吸力,实现磁吸附装置在可导磁的管道表面上形成闭合磁力线,将管道进行吸附,既增加吸附力又具有灵活性,有利于机器人在变径管道以及U型管道上进行检测,利用设有的导磁装置通过衔铁与导磁环的相互配合进行导磁,提高内部励磁线圈的效率,同时能够屏蔽外部靠近空芯线圈的杂散磁通,避免了磁力线衰减而造
一种轮式管道检测机器人.pdf
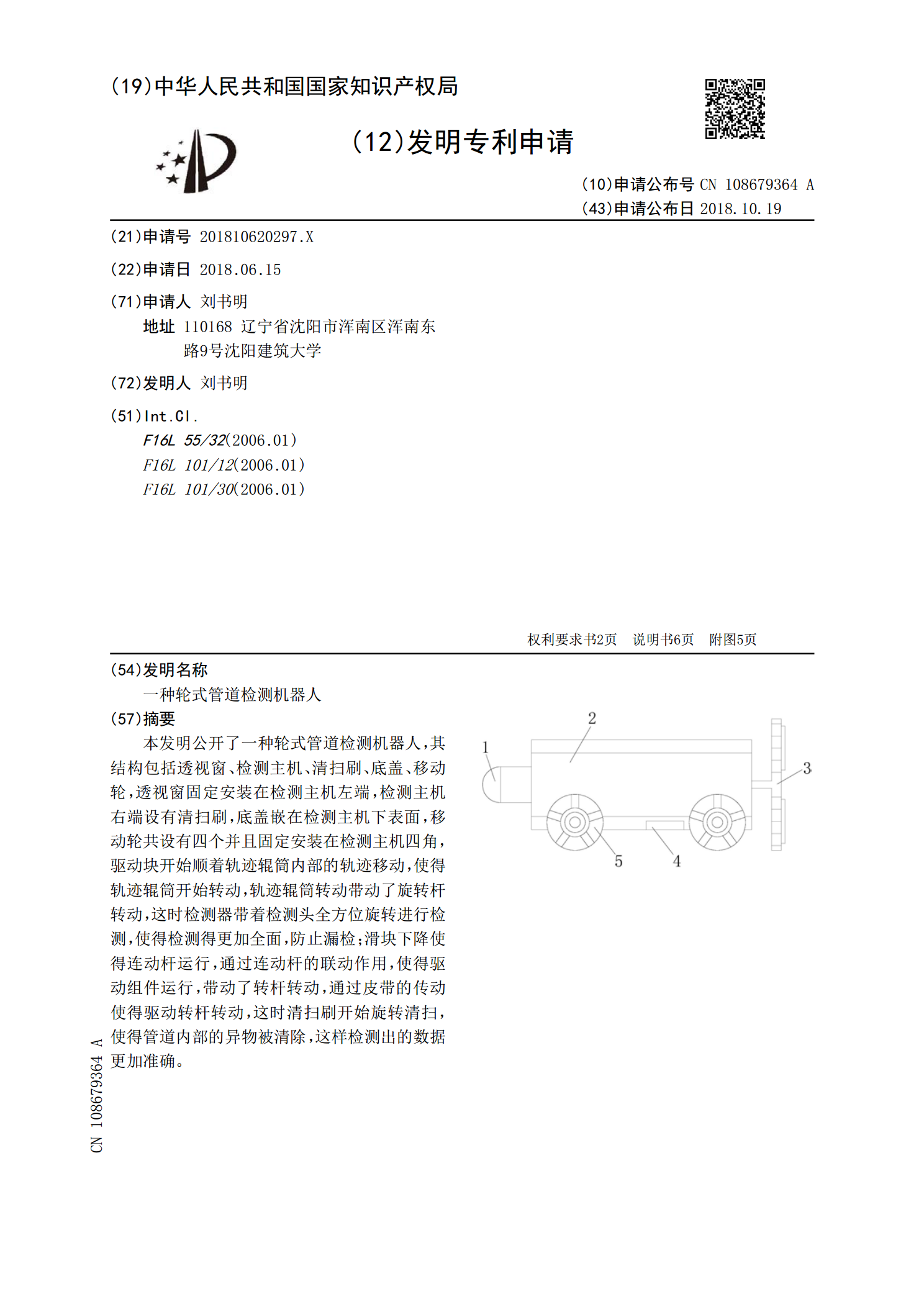
本发明公开了一种轮式管道检测机器人,其结构包括透视窗、检测主机、清扫刷、底盖、移动轮,透视窗固定安装在检测主机左端,检测主机右端设有清扫刷,底盖嵌在检测主机下表面,移动轮共设有四个并且固定安装在检测主机四角,驱动块开始顺着轨迹辊筒内部的轨迹移动,使得轨迹辊筒开始转动,轨迹辊筒转动带动了旋转杆转动,这时检测器带着检测头全方位旋转进行检测,使得检测得更加全面,防止漏检;滑块下降使得连动杆运行,通过连动杆的联动作用,使得驱动组件运行,带动了转杆转动,通过皮带的传动使得驱动转杆转动,这时清扫刷开始旋转清扫,使得管
一种强磁性的轮式磁吸附装置.pdf
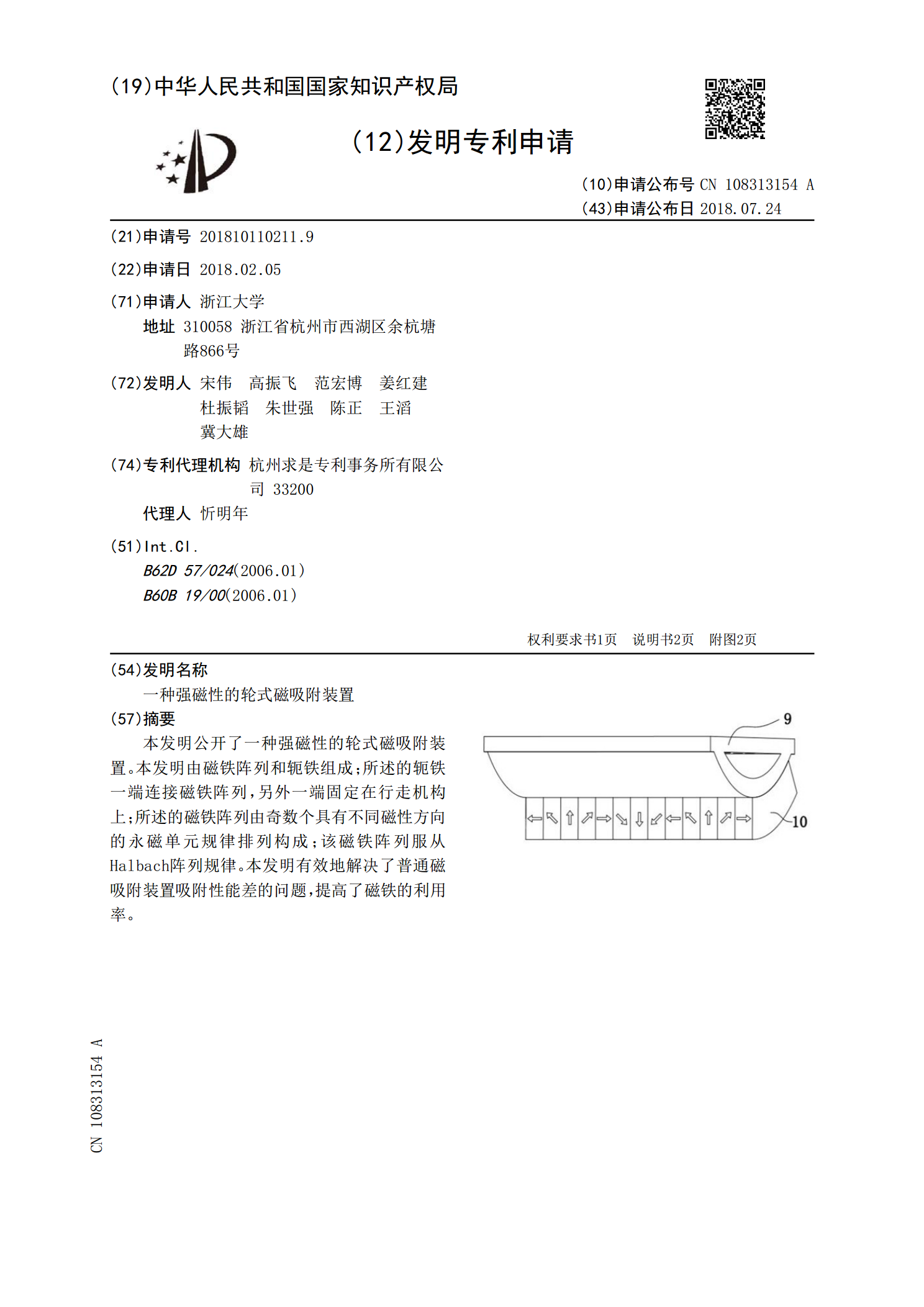
本发明公开了一种强磁性的轮式磁吸附装置。本发明由磁铁阵列和轭铁组成;所述的轭铁一端连接磁铁阵列,另外一端固定在行走机构上;所述的磁铁阵列由奇数个具有不同磁性方向的永磁单元规律排列构成;该磁铁阵列服从Halbach阵列规律。本发明有效地解决了普通磁吸附装置吸附性能差的问题,提高了磁铁的利用率。

轮式管道检测机器人.pdf
本发明公开了轮式管道检测机器人,包括固定安装在轮式行走车体上的喷料座体以及固定安装在所述轮式行走车体上的支撑座体,所述喷料座体顶部端面内设有储料箱体,所述储料箱体顶部端面内设有储料腔,所述储料腔右侧壁连通设有L型喷料管,所述L型喷料管转动配合安装在所述喷料座体右侧端面内且末端安装有喷料机构,所述L型喷料管外周的所述喷料座体内设有空腔,所述空腔内的所述L型喷料管外周固设有从动齿轮,所述储料箱体内转动配合安装有搅拌主轴,所述搅拌主轴外周固设有多组搅料页片,所述储料纤体底端的所述喷料座体内设有传动滑腔,所述搅拌

一种优化的支撑轮式管道内检测机器人.pdf
本发明提供一种优化的支撑轮式管道内检测机器人,包括前机体、后机体、中间连接杆、电机,电机安装于前机体主机体上,通过轴承、大锥齿轮轴,将动力传输到大锥齿轮上,大锥齿轮与小锥齿轮啮合,小锥齿轮轴通过轴承与蜗杆叉分对接,带动蜗杆同步旋转,推动与两个滚轮同轴安装的涡轮旋转,实现前机体的整个动力传输,支撑轮安装座与主机体之间通过弹簧调节,以适应不同管道内径;后机体主要起到支撑的作用以及稳定整个装置的运行,主机体支撑轮安装座之间采用弹簧调节;前后机体之间通过连接杆连接,连接杆的长度可以调整,以满足机器人的长度方向尺寸