
金属壁面自适应攀爬机器人.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

金属壁面自适应攀爬机器人.pdf
发明公开了一种金属壁面自适应攀爬机器人,包括车架和设于车架底部的多个车轮,其中至少一个车轮设有驱动装置,车架底部的多个车轮中至少两个车轮成对安装,成对安装的两个车轮之间设有至少一个磁吸附模块,所述磁吸附模块包括上支架、下支架和永磁体,所述上支架相对固定安装在车架底部,所述下支架通过一个旋转自由度的安装在上支架底部,所述永磁体固定安装在下支架的下端,所述永磁体底部高度低于车轮底部高度,所述永磁体包括位于顶部的扁轭铁和固定与扁轭铁底部的多块矩形钕铁硼永磁体阵列。本发明通过轴向自由度的磁吸附模块大大提高了机器人

适用于金属壁面攀爬的吸附滚轮.pdf
本发明涉及一种适用于金属壁面攀爬的吸附滚轮,包括柱状滚轮壳体,在壳体表面中部粘合橡胶层,在壳体的中心轴上固装有转轴,转轴的左端与壳体的左端面内部固接,在壳体的内部放置有中空的圆柱状永磁体,在永磁体的中空处固装有中空的圆柱状轭铁,在轭铁中空部分的两端分别固装有轴承,所述转轴穿装在两轴承内套上,在壳体右侧的开口处旋装有中心开孔的滚轮盖,滚轮盖将永磁体、轭铁及轴承构成的转动吸附结构封装在壳体内部,转轴的右侧端穿出滚轮盖中心的开孔延伸至滚轮盖外侧。本发明的吸附滚轮通过磁力吸附在金属壁面上,同时具有较好的滚动效果,
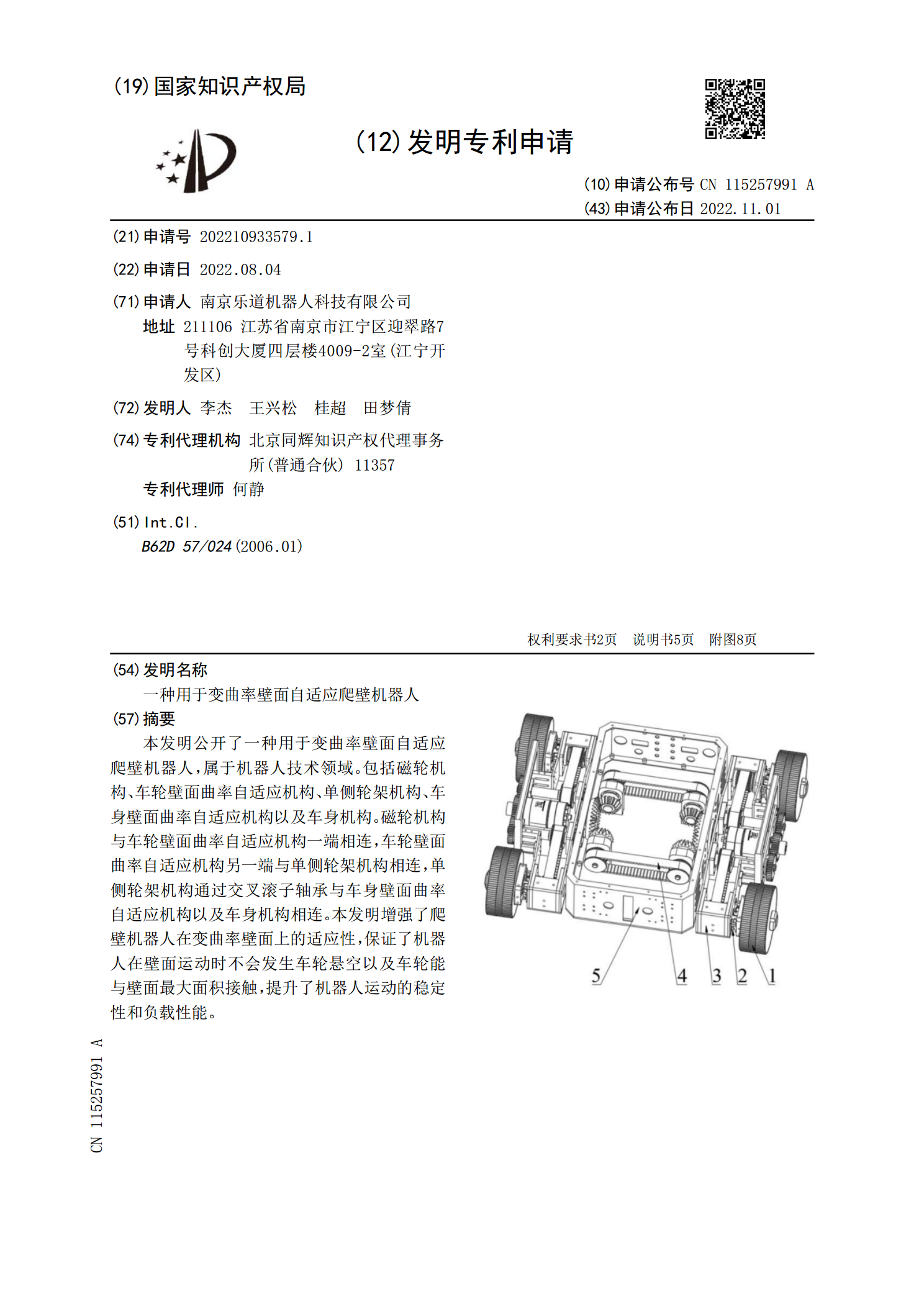
一种用于变曲率壁面自适应爬壁机器人.pdf
本发明公开了一种用于变曲率壁面自适应爬壁机器人,属于机器人技术领域。包括磁轮机构、车轮壁面曲率自适应机构、单侧轮架机构、车身壁面曲率自适应机构以及车身机构。磁轮机构与车轮壁面曲率自适应机构一端相连,车轮壁面曲率自适应机构另一端与单侧轮架机构相连,单侧轮架机构通过交叉滚子轴承与车身壁面曲率自适应机构以及车身机构相连。本发明增强了爬壁机器人在变曲率壁面上的适应性,保证了机器人在壁面运动时不会发生车轮悬空以及车轮能与壁面最大面积接触,提升了机器人运动的稳定性和负载性能。

自攀爬壁面清洗机器人机构设计研究.docx
自攀爬壁面清洗机器人机构设计研究一、研究背景随着城市化的加速发展,城市建筑物越来越高,墙面清洗也变得越来越困难和危险。传统的墙面清洗方式需要人力爬梯或使用高空吊篮,存在很大的安全隐患,而且效率低下。因此,开发一种自动攀爬的壁面清洗机器人无疑是十分必要的。二、相关技术发展壁面清洗机器人需要涉及到多个学科的知识,包括机械结构设计、控制系统设计、传感器技术等。机器人的机构设计是机器人实现全方位自由攀爬和改变姿态的核心。常见的壁面清洗机器人机构设计包括链式机构、轮式机构、爬墙蜗杆机构等。三、机器人机构设计研究1.
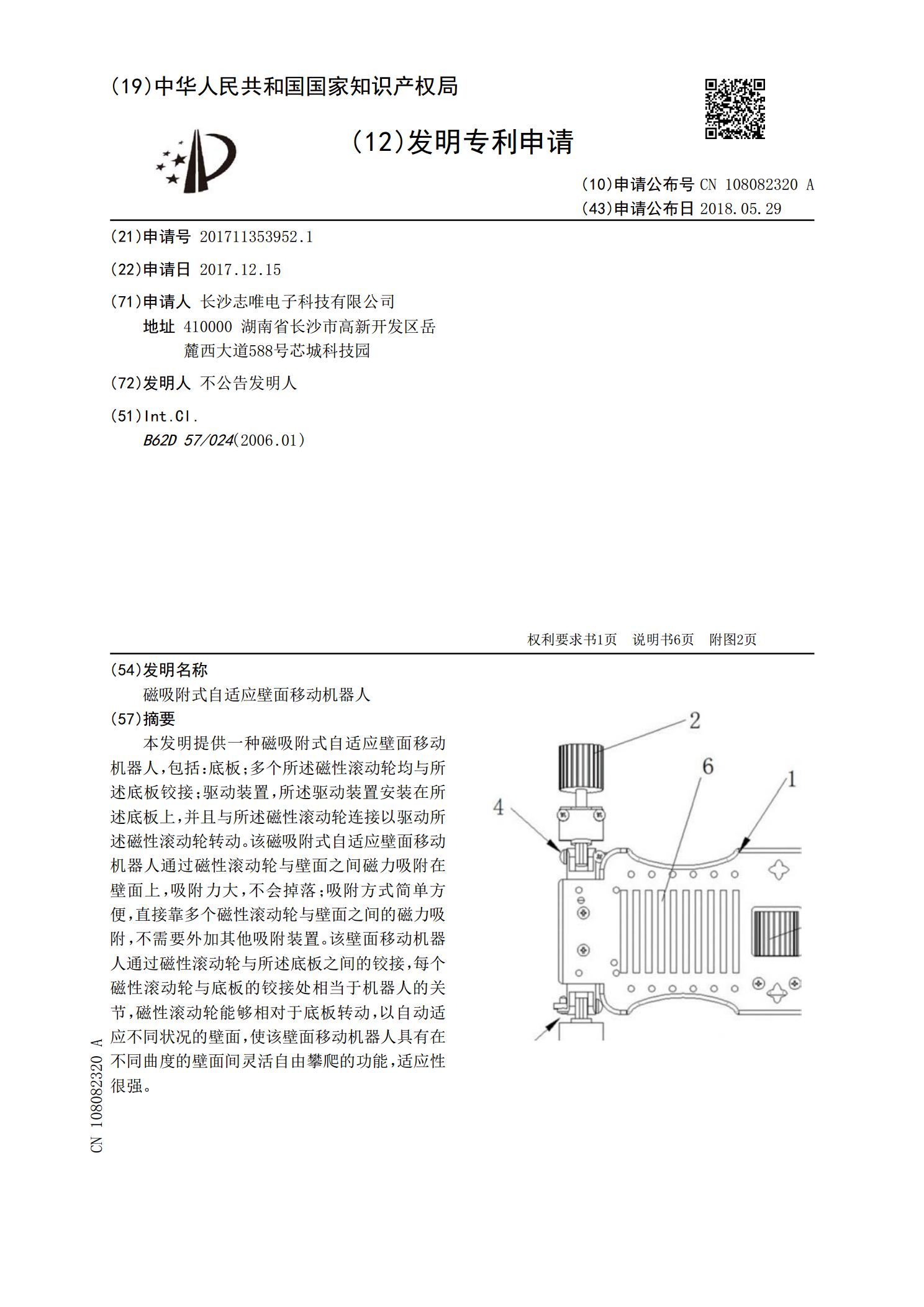
磁吸附式自适应壁面移动机器人.pdf
本发明提供一种磁吸附式自适应壁面移动机器人,包括:底板;多个所述磁性滚动轮均与所述底板铰接;驱动装置,所述驱动装置安装在所述底板上,并且与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式自适应壁面移动机器人通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置。该壁面移动机器人通过磁性滚动轮与所述底板之间的铰接,每个磁性滚动轮与底板的铰接处相当于机器人的关节,磁性滚动轮能够相对于底板转动,以自动适应不同状况的壁