
一种家用清洁搬运机器人.pdf

St****36


1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种家用清洁搬运机器人.pdf
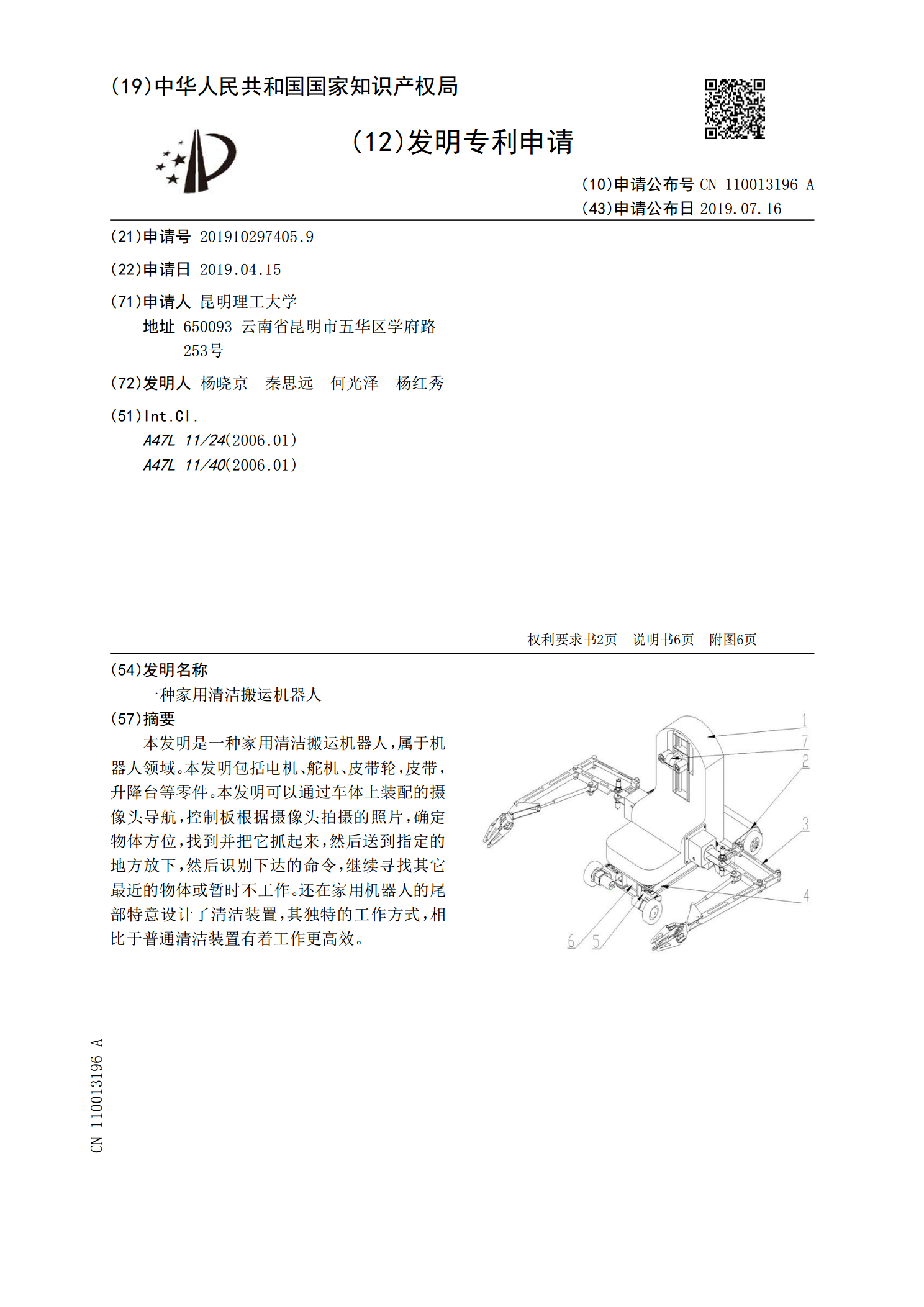
本发明是一种家用清洁搬运机器人,属于机器人领域。本发明包括电机、舵机、皮带轮,皮带,升降台等零件。本发明可以通过车体上装配的摄像头导航,控制板根据摄像头拍摄的照片,确定物体方位,找到并把它抓起来,然后送到指定的地方放下,然后识别下达的命令,继续寻找其它最近的物体或暂时不工作。还在家用机器人的尾部特意设计了清洁装置,其独特的工作方式,相比于普通清洁装置有着工作更高效。

一种家用摆向清洁机器人.pdf
发明属于机器人应用领域,为一种家用摆向清洁机器人,一种家用摆向清洁机器人,包括壳体,所述壳体上侧设有传动腔,所述传动腔内设有传动装置,所述壳体右侧设有收集腔,所述收集腔内设有收集装置,所述壳体左侧设有清洁腔,所述清洁腔内设有清理装置,所述壳体下侧设有风干腔,所述风干腔内设有风干装置。本次设计机器人能够实现对障碍物的自动转向,使其在运作过程中避开障碍物,在非人工的条件下完成对地面的清洗,能实现垃圾的高效储存,和减少垃圾对内部泵体的损害,使机器人能失效时间延长,能够实现对水资源的高效使用,与对地面的高效清洁,
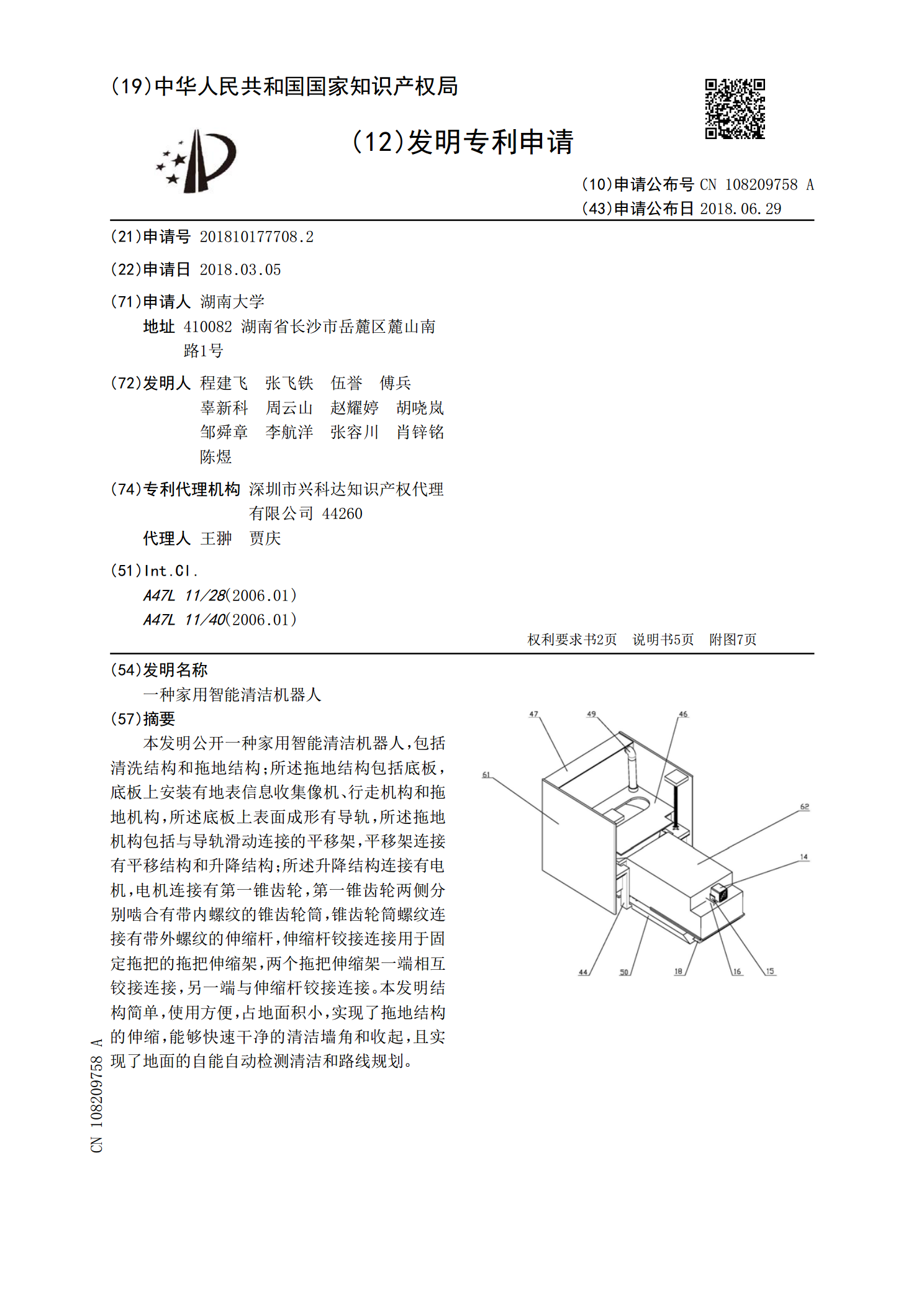
一种家用智能清洁机器人.pdf
本发明公开一种家用智能清洁机器人,包括清洗结构和拖地结构;所述拖地结构包括底板,底板上安装有地表信息收集像机、行走机构和拖地机构,所述底板上表面成形有导轨,所述拖地机构包括与导轨滑动连接的平移架,平移架连接有平移结构和升降结构;所述升降结构连接有电机,电机连接有第一锥齿轮,第一锥齿轮两侧分别啮合有带内螺纹的锥齿轮筒,锥齿轮筒螺纹连接有带外螺纹的伸缩杆,伸缩杆铰接连接用于固定拖把的拖把伸缩架,两个拖把伸缩架一端相互铰接连接,另一端与伸缩杆铰接连接。本发明结构简单,使用方便,占地面积小,实现了拖地结构的伸缩,

一种压力可调节的家用清洁机器人.pdf
本发明公开了一种压力可调节的家用清洁机器人,属于清洁机器人领域。它包括车轮A、车轮B、装设于车轮A和车轮B上的机架板、装设于机架板上的运动控制系统和压力可调清洁模块,运动控制系统能够控制车轮A和车轮B自由转动;压力可调清洁模块包括相互平行装设的圆形导轨A和圆形导轨B、工作端、升降板、螺杆、金属螺旋弹簧A、金属螺旋弹簧B、U型架和步进电机;工作端包括工作端本体、储水层、和摩擦层;储水层选用可显著发生弹性压缩变形的保水材料制作;摩擦层采用柔性材料制作。本发明是一种结构简单紧凑、可代替人工拖地、通过金属螺旋弹簧
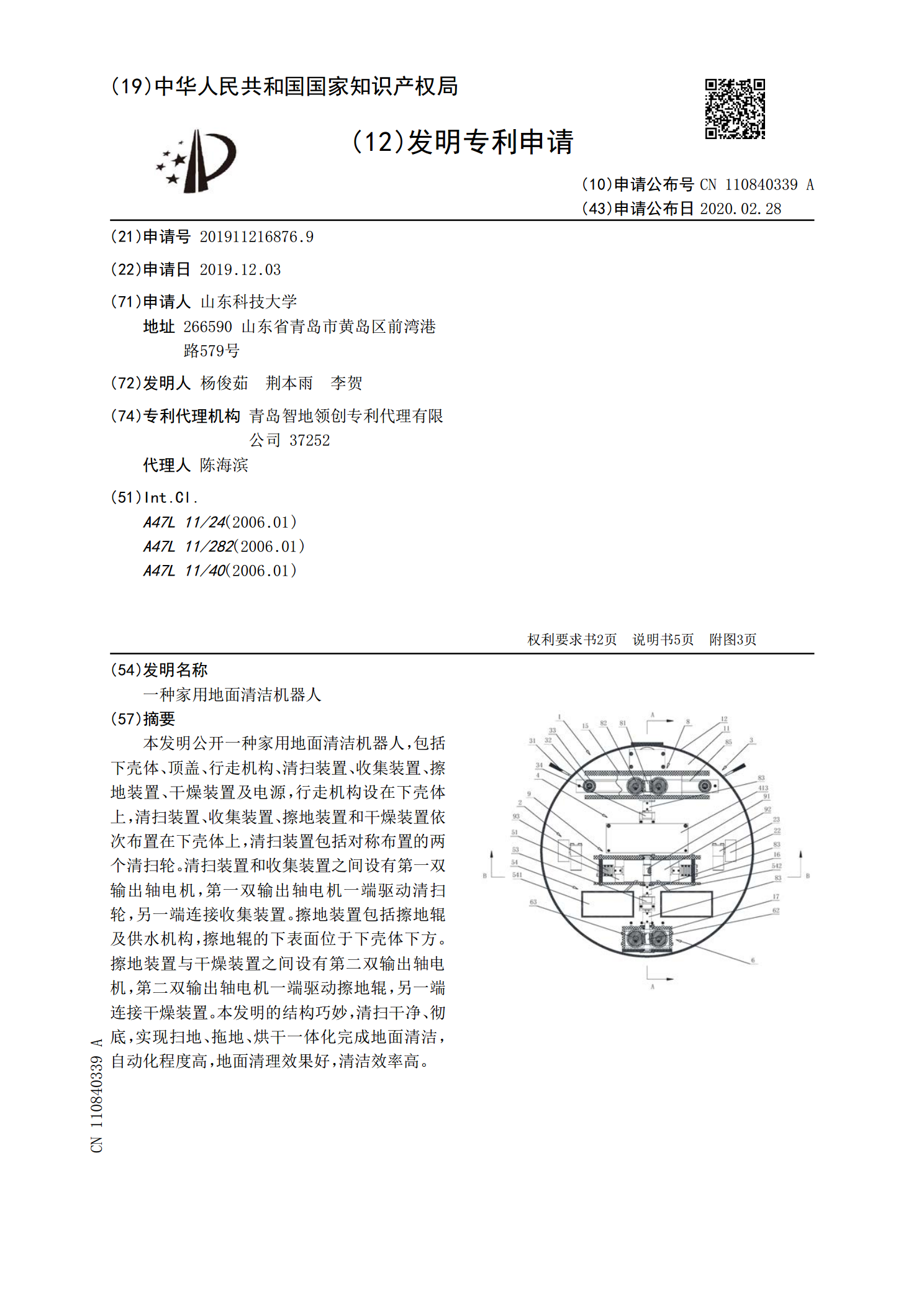
一种家用地面清洁机器人.pdf
本发明公开一种家用地面清洁机器人,包括下壳体、顶盖、行走机构、清扫装置、收集装置、擦地装置、干燥装置及电源,行走机构设在下壳体上,清扫装置、收集装置、擦地装置和干燥装置依次布置在下壳体上,清扫装置包括对称布置的两个清扫轮。清扫装置和收集装置之间设有第一双输出轴电机,第一双输出轴电机一端驱动清扫轮,另一端连接收集装置。擦地装置包括擦地辊及供水机构,擦地辊的下表面位于下壳体下方。擦地装置与干燥装置之间设有第二双输出轴电机,第二双输出轴电机一端驱动擦地辊,另一端连接干燥装置。本发明的结构巧妙,清扫干净、彻底,实