
基于数控加工路径最小化修正的轮廓误差预补偿方法.pdf

一吃****继勇

1/10

2/10
3/10
4/10
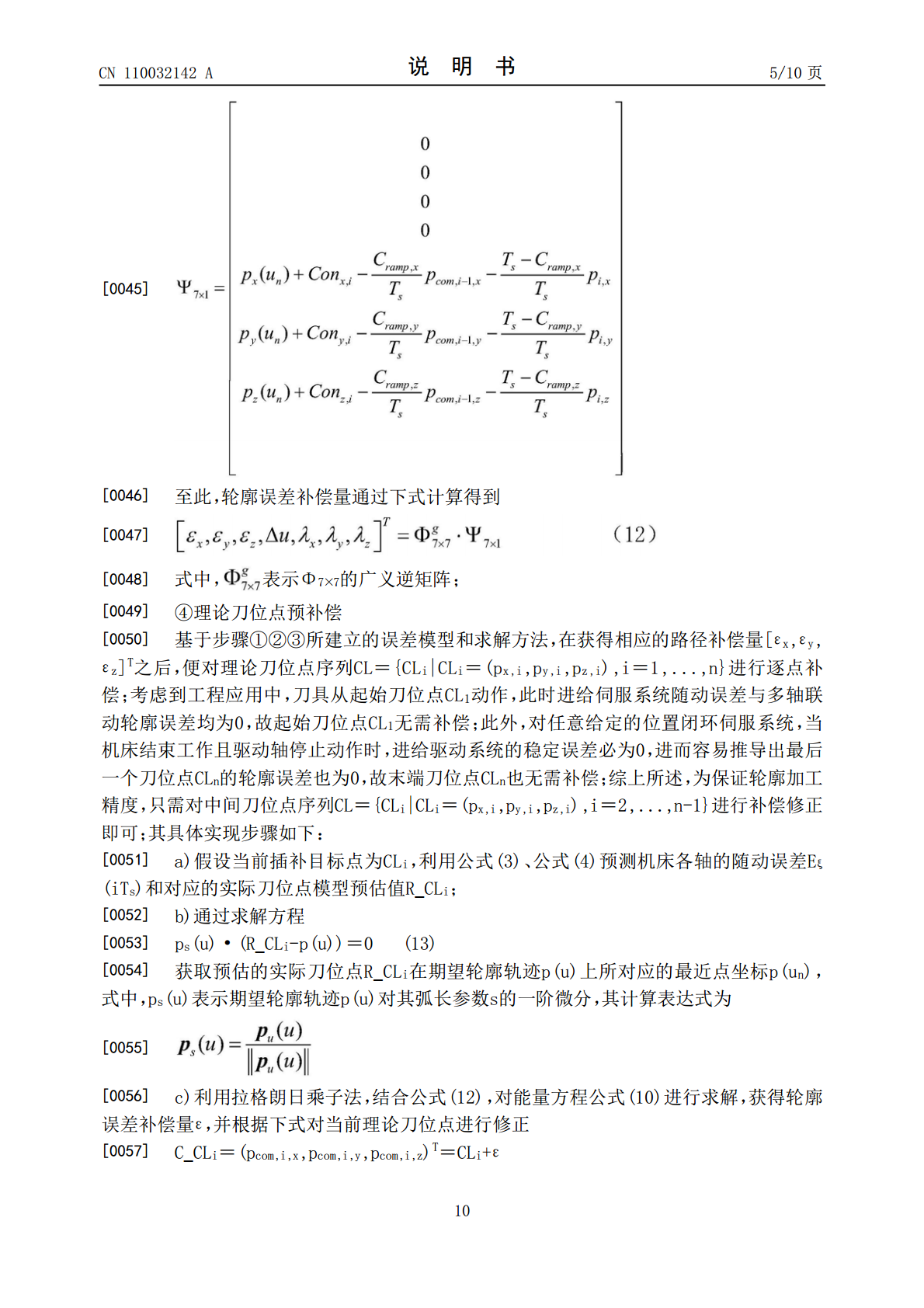
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于数控加工路径最小化修正的轮廓误差预补偿方法.pdf
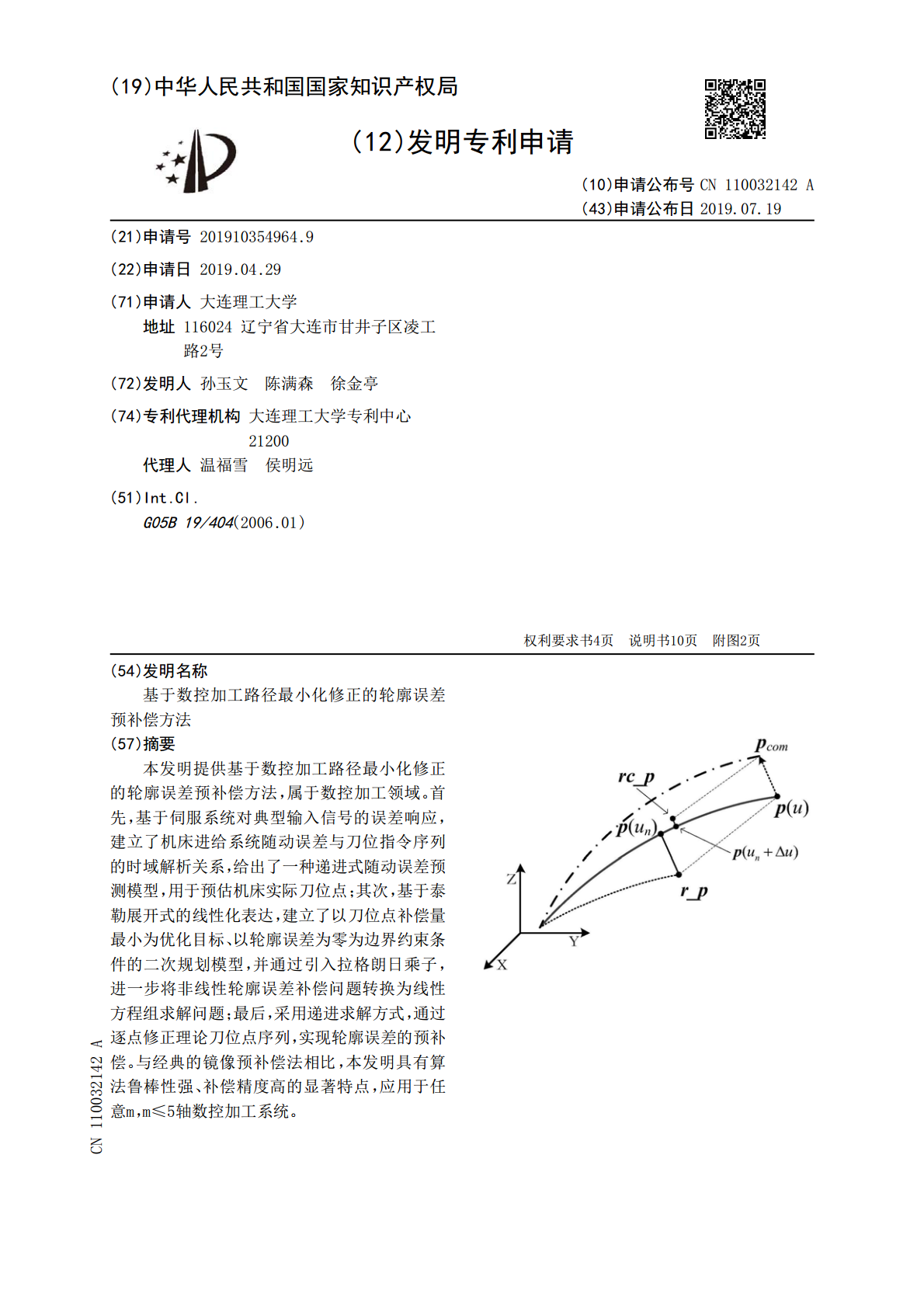
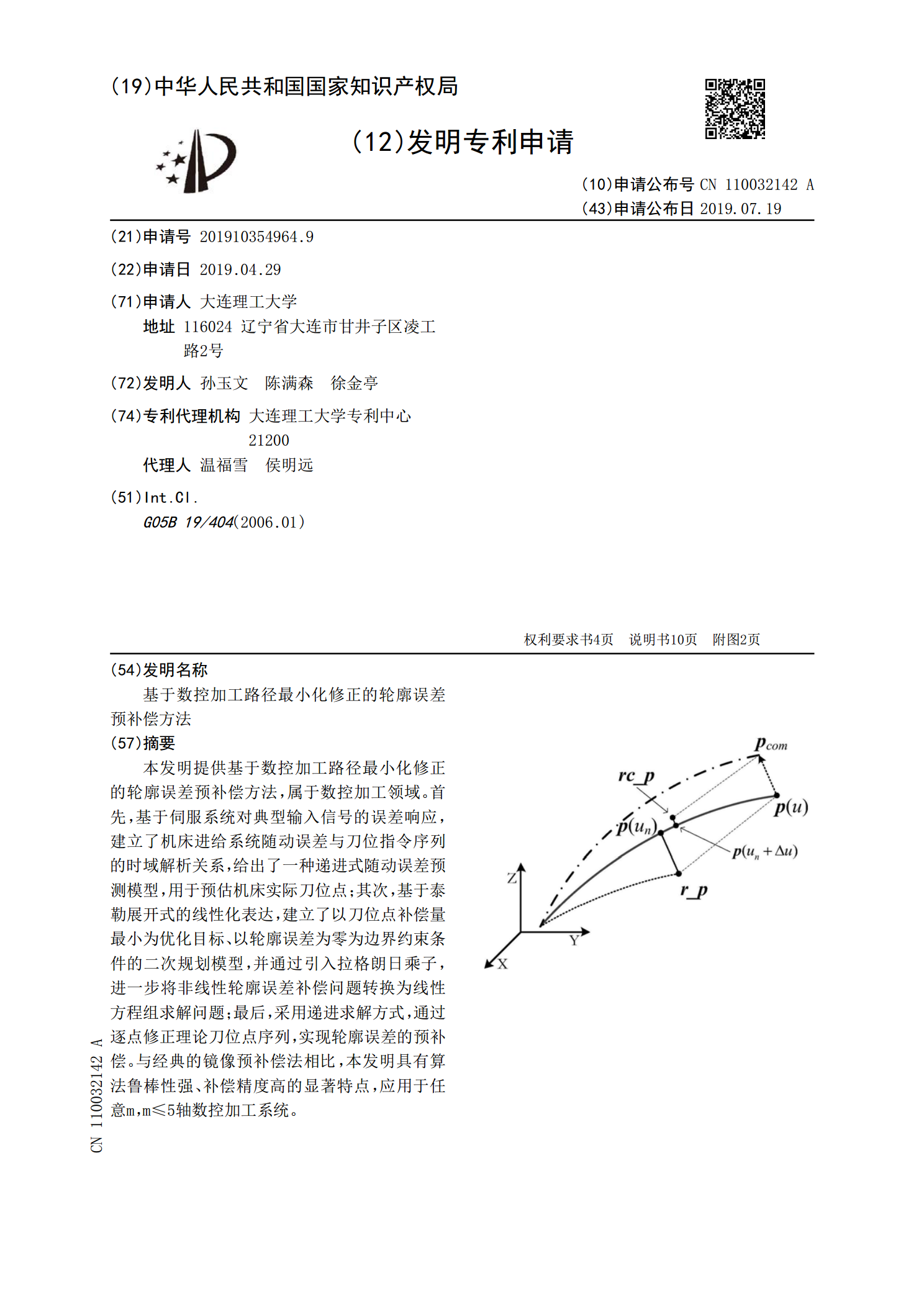
本发明提供基于数控加工路径最小化修正的轮廓误差预补偿方法,属于数控加工领域。首先,基于伺服系统对典型输入信号的误差响应,建立了机床进给系统随动误差与刀位指令序列的时域解析关系,给出了一种递进式随动误差预测模型,用于预估机床实际刀位点;其次,基于泰勒展开式的线性化表达,建立了以刀位点补偿量最小为优化目标、以轮廓误差为零为边界约束条件的二次规划模型,并通过引入拉格朗日乘子,进一步将非线性轮廓误差补偿问题转换为线性方程组求解问题;最后,采用递进求解方式,通过逐点修正理论刀位点序列,实现轮廓误差的预补偿。与经典的
一种数控加工中轮廓误差的补偿方法.pdf
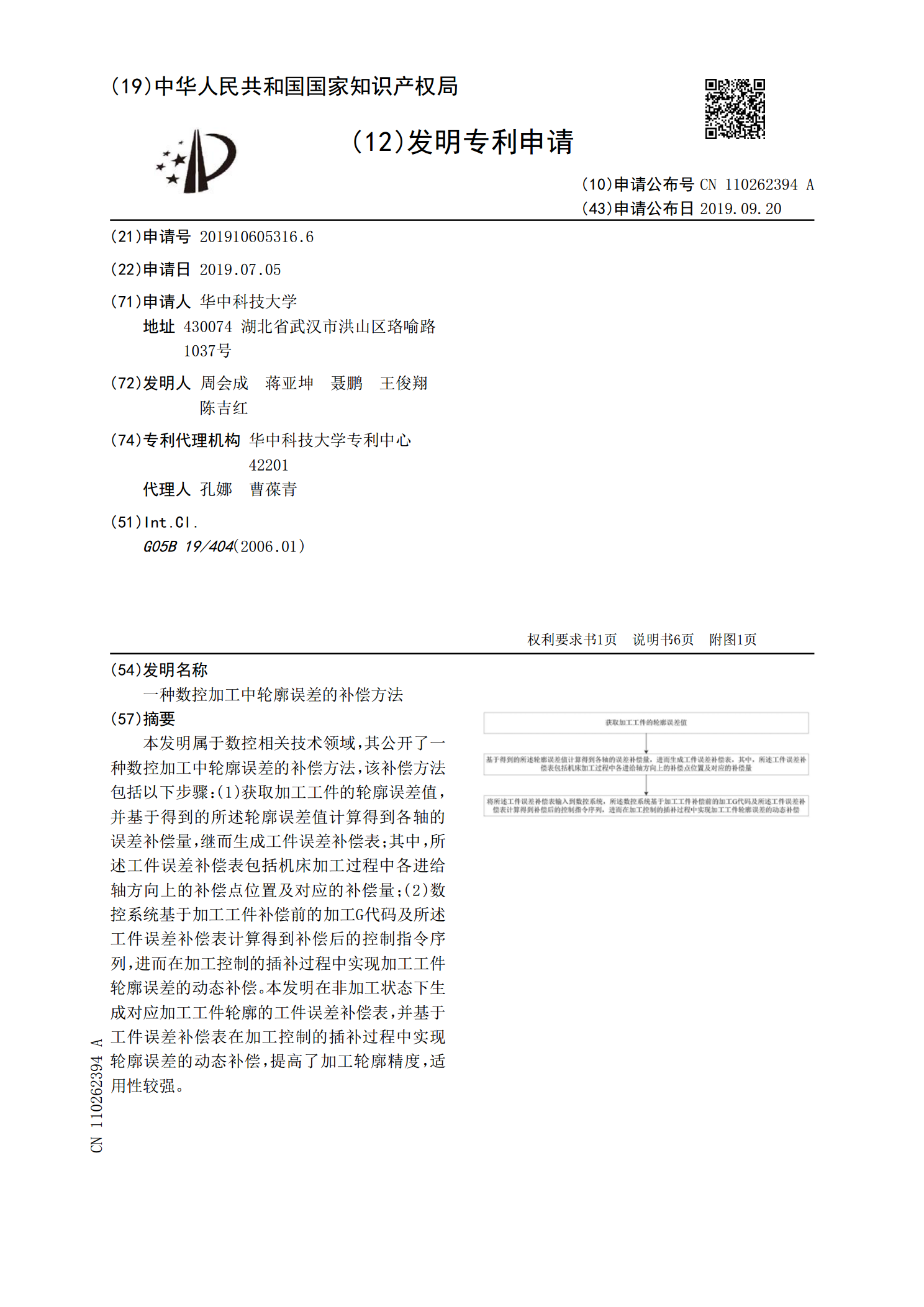
本发明属于数控相关技术领域,其公开了一种数控加工中轮廓误差的补偿方法,该补偿方法包括以下步骤:(1)获取加工工件的轮廓误差值,并基于得到的所述轮廓误差值计算得到各轴的误差补偿量,继而生成工件误差补偿表;其中,所述工件误差补偿表包括机床加工过程中各进给轴方向上的补偿点位置及对应的补偿量;(2)数控系统基于加工工件补偿前的加工G代码及所述工件误差补偿表计算得到补偿后的控制指令序列,进而在加工控制的插补过程中实现加工工件轮廓误差的动态补偿。本发明在非加工状态下生成对应加工工件轮廓的工件误差补偿表,并基于工件误差

凸轮轴数控磨削轮廓误差补偿方法.pdf
本发明公开了一种凸轮轴数控磨削轮廓误差补偿方法,a.通过多次试切加工,对加工后凸轮片轮廓线进行离线测量,获取实际轮廓线数据——升程;b.通过对比理论升程和实测升程数据大小,求解整个凸轮片一周的升程误差值,分析升程误差,预测误差;c.构建虚拟升程表并对虚拟升程进行二次光顺处理;d.采用经后处理的虚拟升程表取代原有升程表,进行相同工艺条件下,与该试切凸轮轴同型号的凸轮轴的数控加工。基于以上步骤,编程开发了凸轮轴数控磨削误差分析与补偿处理软件,实现了技术方法的智能化、自动化应用,加工出的凸轮片整个轮廓

基于Cycle to Cycle反馈控制的数控凸轮磨削轮廓误差补偿控制方法.pdf
本发明涉及一种针对具有重复运动特性的被控系统跟踪误差的CycletoCycle反馈控制补偿方法,具体涉及基于CycletoCycle反馈控制的数控凸轮磨削轮廓误差补偿控制方法。以解决数控凸轮磨削传统控制方法存在的仅利用当前磨削周期的信息而忽略之前磨削周期信息的问题,提高数控凸轮磨削的轮廓精度。CtC反馈控制是在逐次循环过程控制之间利用上一个周期的磨削信息即轮廓误差来指导本周期的磨削过程。通过系统动态与稳态特性分析,优化CtC反馈控制器参数,使得磨削轮廓误差控制在允许的范围之内,得到满意的磨削精度。

加工进给速度优化的刀轨曲线轮廓误差补偿方法.pdf
本发明进给速度优化的刀轨曲线轮廓误差补偿方法属于复杂曲面零件高质高效加工领域,涉及一种包含进给速度优化和刀位点修改的刀轨曲线轮廓误差补偿方法。该方法根据直线插补加工代码中的刀位点和加工进给速度信息,以数控机床进给轴加速度和加加速度极限为约束,对进给速度进行优化;利用三次B样条拟合方法平滑进给速度曲线,得到最终优化后的加工进给速度;再利用刀位点和优化后进给速度,计算各轴轮廓误差补偿量,进而获得补偿后直线插补数控指令,用于实际加工,从而提高轮廓精度。该方法的实施过程仅需要修改直线插补加工代码中的刀位点和加工进