
基于多定位传感器的高精度船舶轮廓构建系统.pdf

是雁****找我

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于多定位传感器的高精度船舶轮廓构建系统.pdf
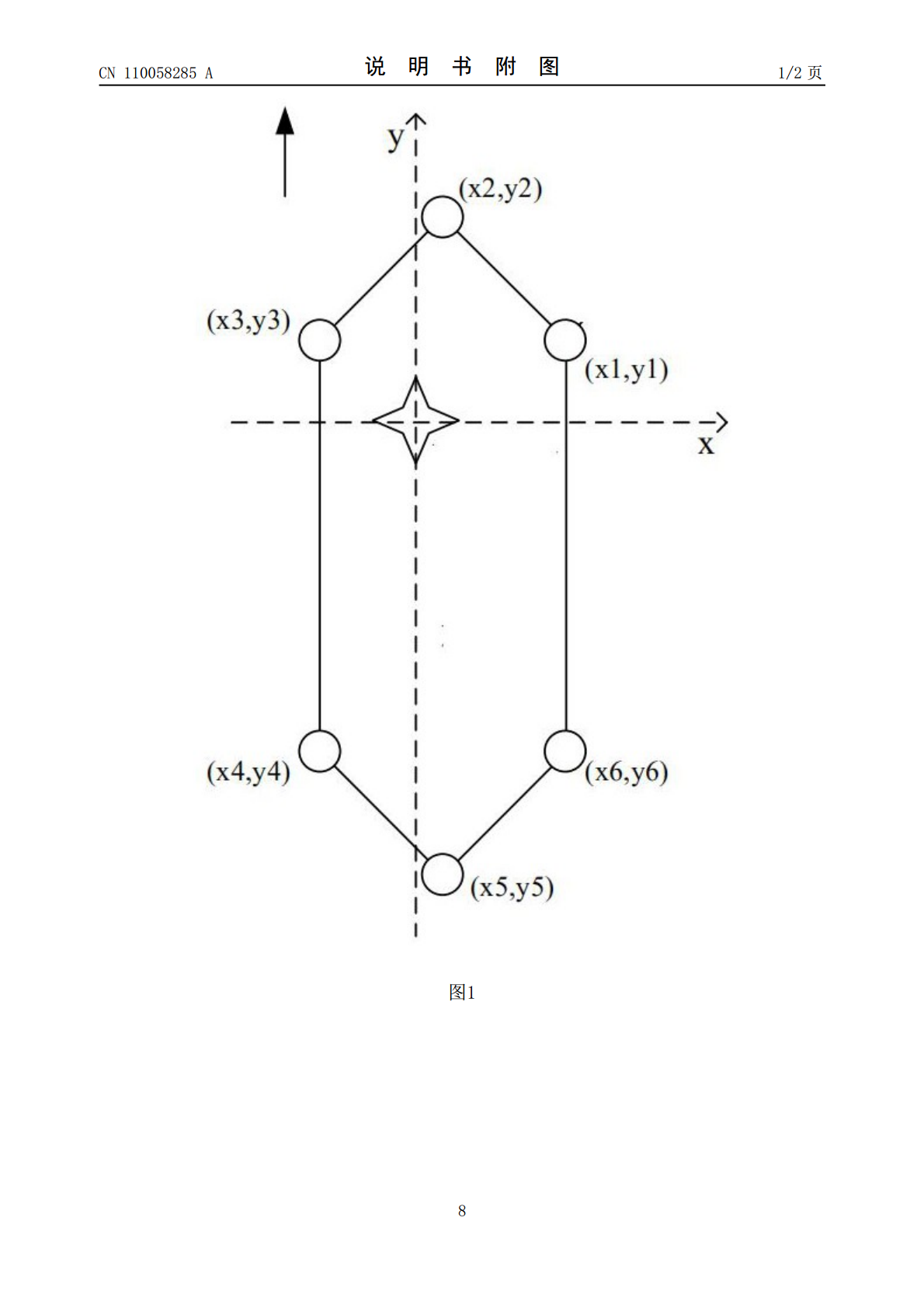
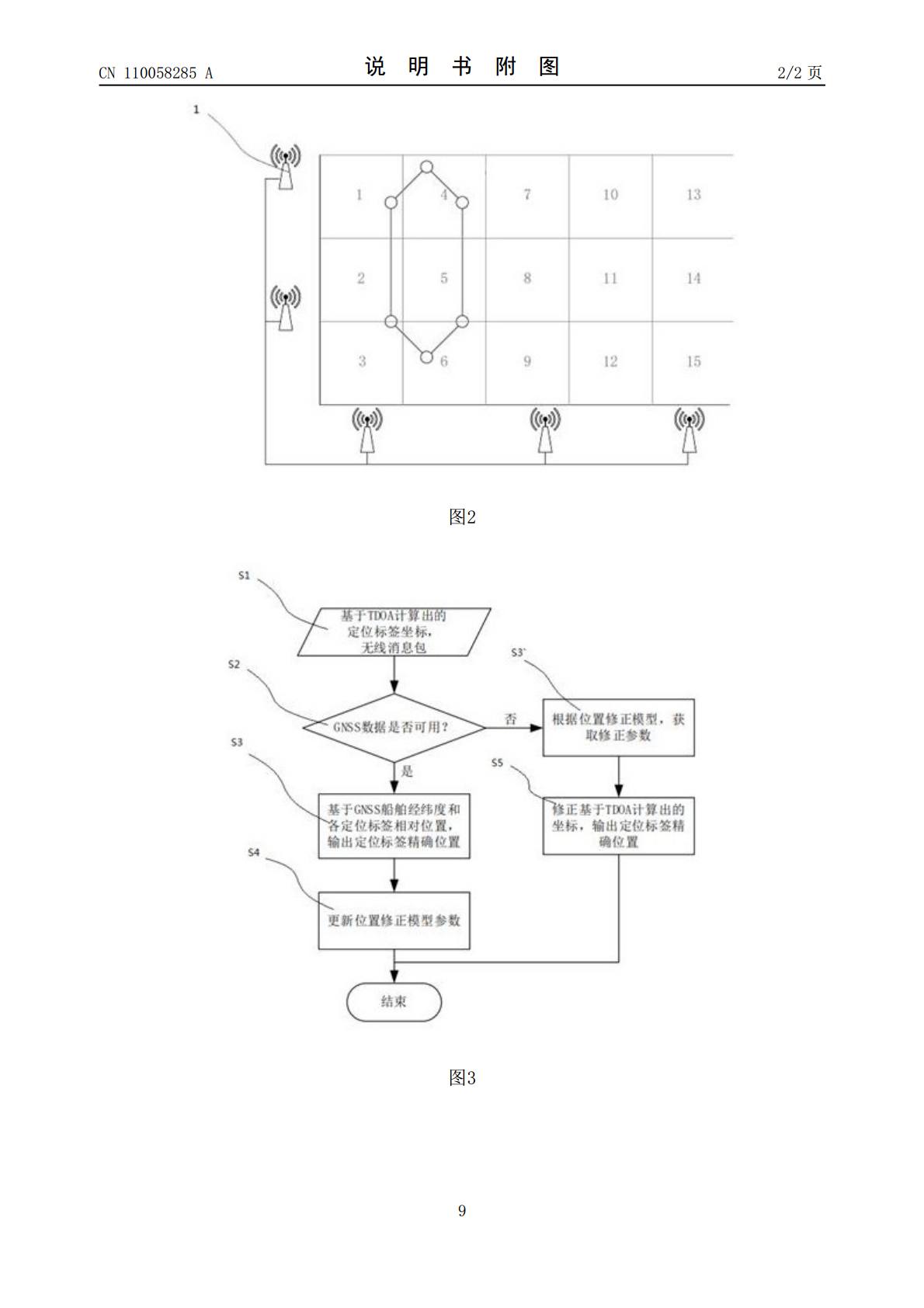
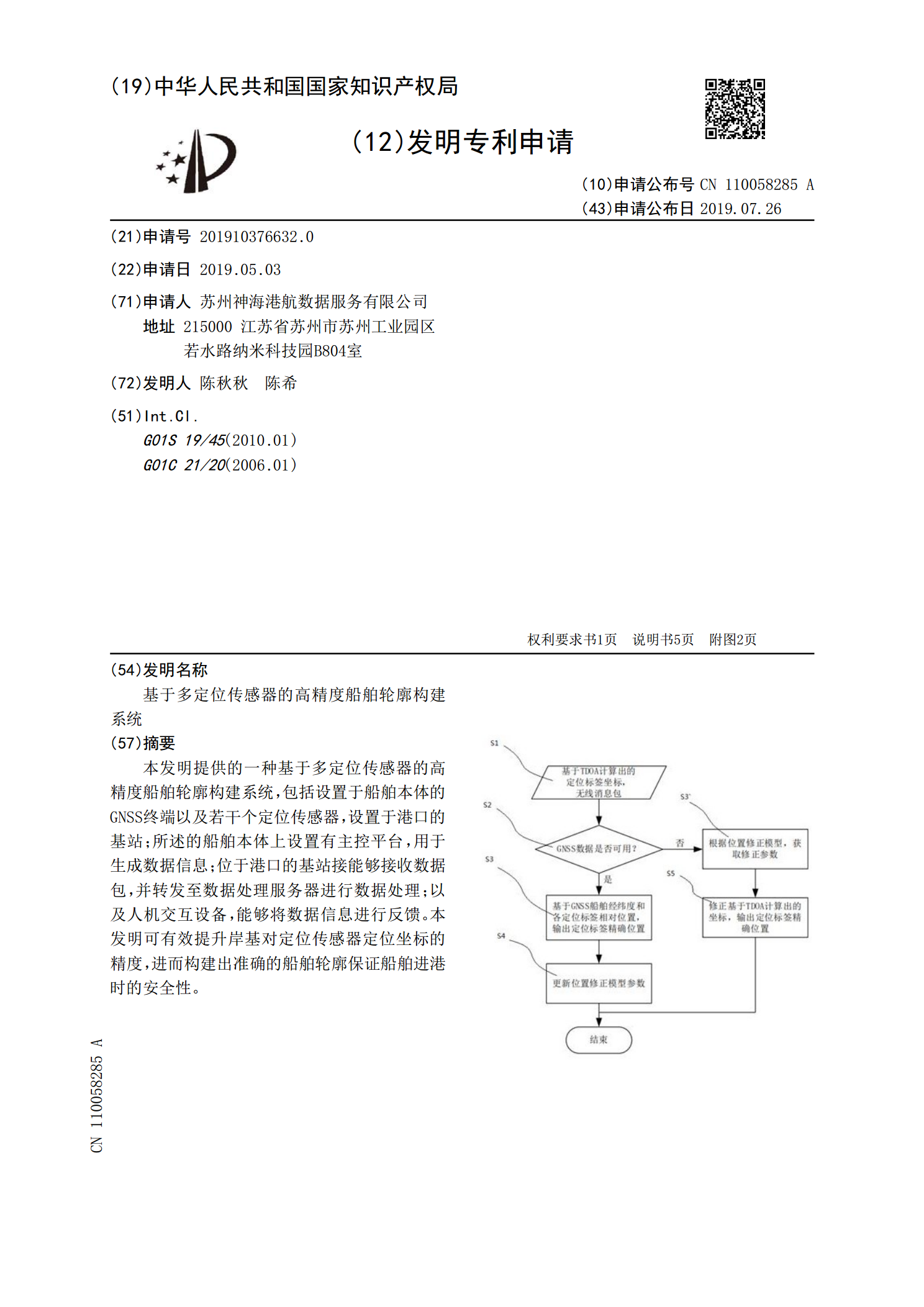
本发明提供的一种基于多定位传感器的高精度船舶轮廓构建系统,包括设置于船舶本体的GNSS终端以及若干个定位传感器,设置于港口的基站;所述的船舶本体上设置有主控平台,用于生成数据信息;位于港口的基站接能够接收数据包,并转发至数据处理服务器进行数据处理;以及人机交互设备,能够将数据信息进行反馈。本发明可有效提升岸基对定位传感器定位坐标的精度,进而构建出准确的船舶轮廓保证船舶进港时的安全性。
基于多定位标签的高精度船舶轮廓构建方法.pdf
本发明提供的一种基于多定位标签的高精度船舶轮廓构建方法,具体为标定船舶的航首方向数据信息,以及全球导航卫星系统对船舶的定位坐标数据信息和船舶本体上定位标签的定位坐标数据信息,将数据信息打包获取数据包;将数据包进行广播;基站接收数据包;数据处理终端计算修正基站对船舶本体上定位标签的定位坐标;船舶接收修正后的基站对船舶本体上定位标签的定位坐标,并依据修正后的定位标签的定位坐标在可视终端的显示界面上构建船舶轮廓。本发明可有效提升岸基对定位标签定位坐标的精度,进而构建出准确的船舶轮廓保证船舶进港时的安全性。
基于TOF传感器的高精度手术工具定位方法及系统.pdf
本发明公开了一种基于TOF传感器的高精度手术工具定位方法及系统,属于视觉定位技术领域,该方法包括:术中手术导航时,通过单个TOF传感器,同时实现点云测量物体形状及手术工具高精度定位;通过单个TOF传感器对手术工具上设置的多个反光球进行图像采集,获得反光球的强度图像与深度图像;根据所述强度图像,对反光球进行检测,获取所述各反光球的二维重心坐标;根据所述深度图像,对反光球进行识别,获取各反光球的一一对应关系;采用预设的算法,根据二维坐标和光球三维位置关系精准计算各个反光球姿态。通过本公开的处理方案,极大程度上
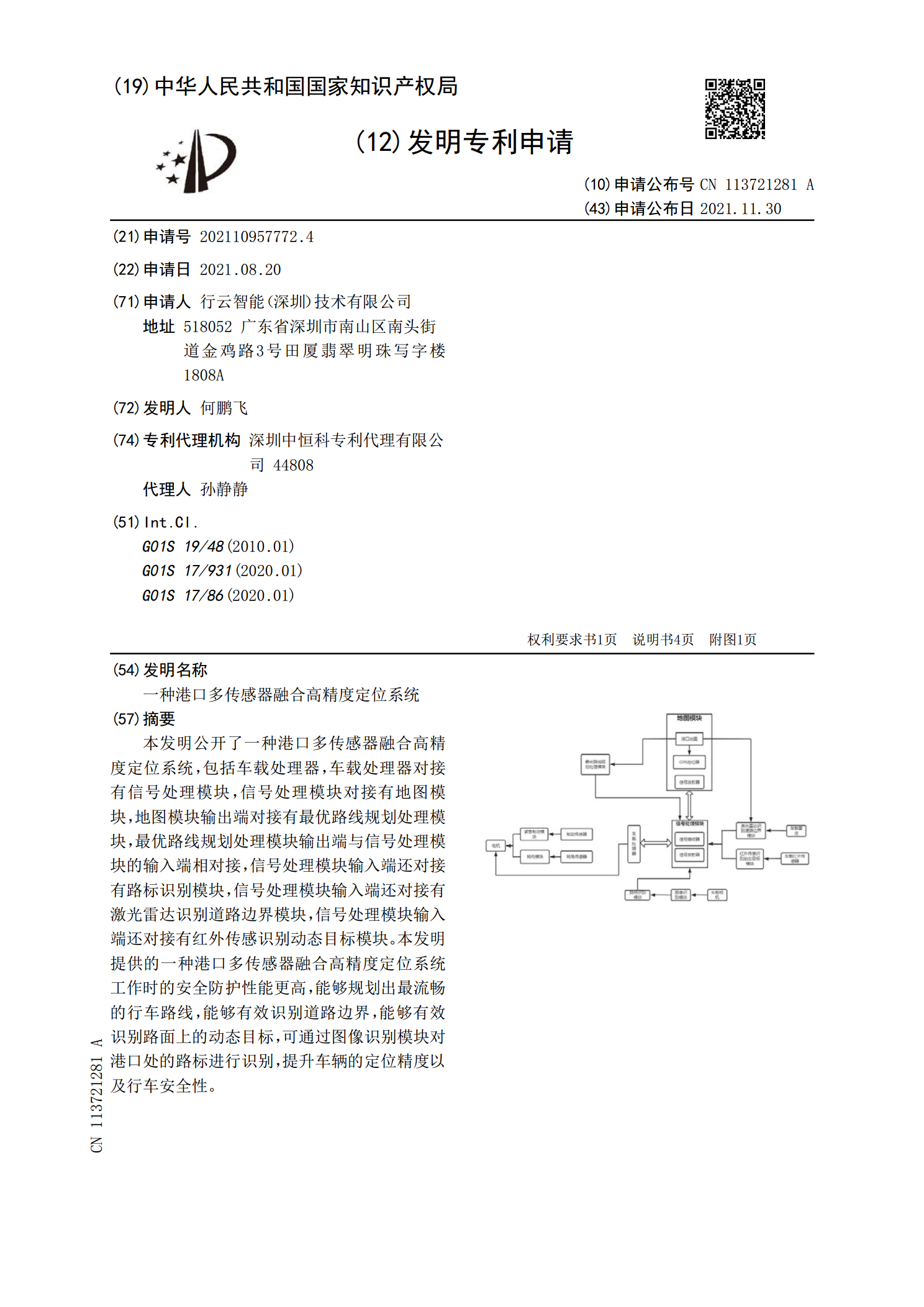
一种港口多传感器融合高精度定位系统.pdf
本发明公开了一种港口多传感器融合高精度定位系统,包括车载处理器,车载处理器对接有信号处理模块,信号处理模块对接有地图模块,地图模块输出端对接有最优路线规划处理模块,最优路线规划处理模块输出端与信号处理模块的输入端相对接,信号处理模块输入端还对接有路标识别模块,信号处理模块输入端还对接有激光雷达识别道路边界模块,信号处理模块输入端还对接有红外传感识别动态目标模块。本发明提供的一种港口多传感器融合高精度定位系统工作时的安全防护性能更高,能够规划出最流畅的行车路线,能够有效识别道路边界,能够有效识别路面上的动态
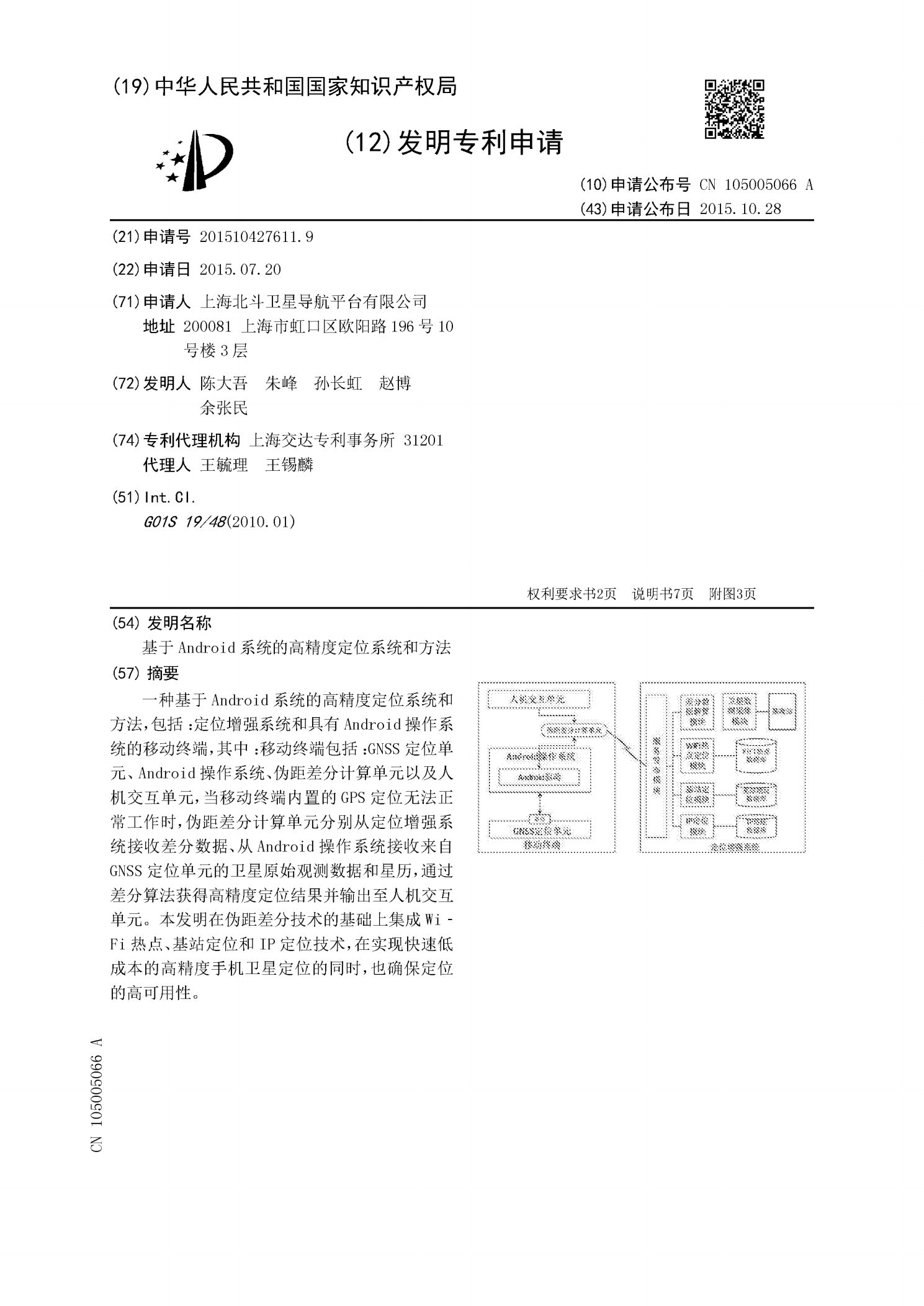
基于Android系统的高精度定位系统和方法.pdf
一种基于Android系统的高精度定位系统和方法,包括:定位增强系统和具有Android操作系统的移动终端,其中:移动终端包括:GNSS定位单元、Android操作系统、伪距差分计算单元以及人机交互单元,当移动终端内置的GPS定位无法正常工作时,伪距差分计算单元分别从定位增强系统接收差分数据、从Android操作系统接收来自GNSS定位单元的卫星原始观测数据和星历,通过差分算法获得高精度定位结果并输出至人机交互单元。本发明在伪距差分技术的基础上集成Wi‐Fi热点、基站定位和IP定位技术,在实现快速低成本的