
一种港口多传感器融合高精度定位系统.pdf

书錦****by

1/7
2/7

3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种港口多传感器融合高精度定位系统.pdf
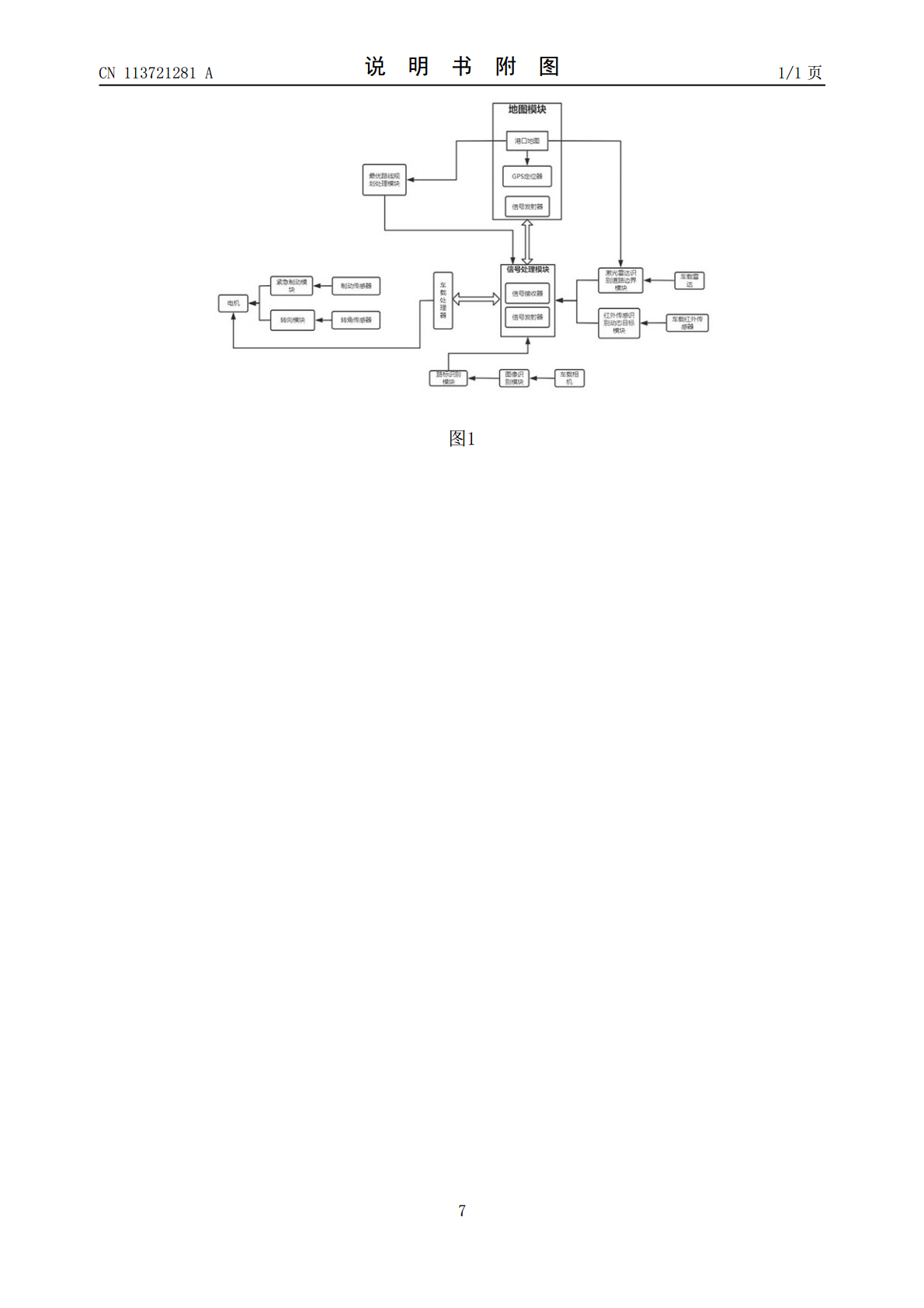
本发明公开了一种港口多传感器融合高精度定位系统,包括车载处理器,车载处理器对接有信号处理模块,信号处理模块对接有地图模块,地图模块输出端对接有最优路线规划处理模块,最优路线规划处理模块输出端与信号处理模块的输入端相对接,信号处理模块输入端还对接有路标识别模块,信号处理模块输入端还对接有激光雷达识别道路边界模块,信号处理模块输入端还对接有红外传感识别动态目标模块。本发明提供的一种港口多传感器融合高精度定位系统工作时的安全防护性能更高,能够规划出最流畅的行车路线,能够有效识别道路边界,能够有效识别路面上的动态
一种井下多传感器的融合定位系统.pdf
本发明公开了一种井下多传感器的融合定位系统,属于定位领域。本发明的井下多传感器的融合定位系统,照明装置和图像预处理模块的存在克服了低照度条件下图像亮度值低,相机难以采集有效信息的困难,使得视觉惯性里程计可在低照度的环境中仍可正常工作;从惯性测量单元读取相邻两帧图像相对位姿作为相机运动跟踪模块初始值,可提高特征匹配速度和准确率,提高定位精度与实时性;基于可定位性估计,合理设置融合权值,有效地融合双目相机,惯性测量单元的信息,充分发挥每个传感器的特点,提供精度高,鲁棒性好的定位。

一种基于多传感器数据融合的定位系统及定位方法.pdf
本发明公开了一种基于多传感器数据融合的定位系统及定位方法,通过在码盘架上固定编码器和全向轮,全向轮的主转动轴与编码器转轴连接,固定支架上固定有三个码盘架,三个码盘架上的三个编码器转轴轴线所在竖直平面之间的夹角均为120°,三个全向轮同时接触运动地面;采用三码盘全场定位系统,当移动机器人运动时,三个全向轮被动旋转,能够准确获取机器人运动全方位移动数据,从而减小因陀螺仪的角度漂移而导致定位不准的影响,通过三个码盘坐标的更新公式获取待定位机器人在三个自由度的变化情况,实现相对定位,提高了机器人在高速行驶以及不同
面向复杂港口环境的多传感器融合定位方法.pdf
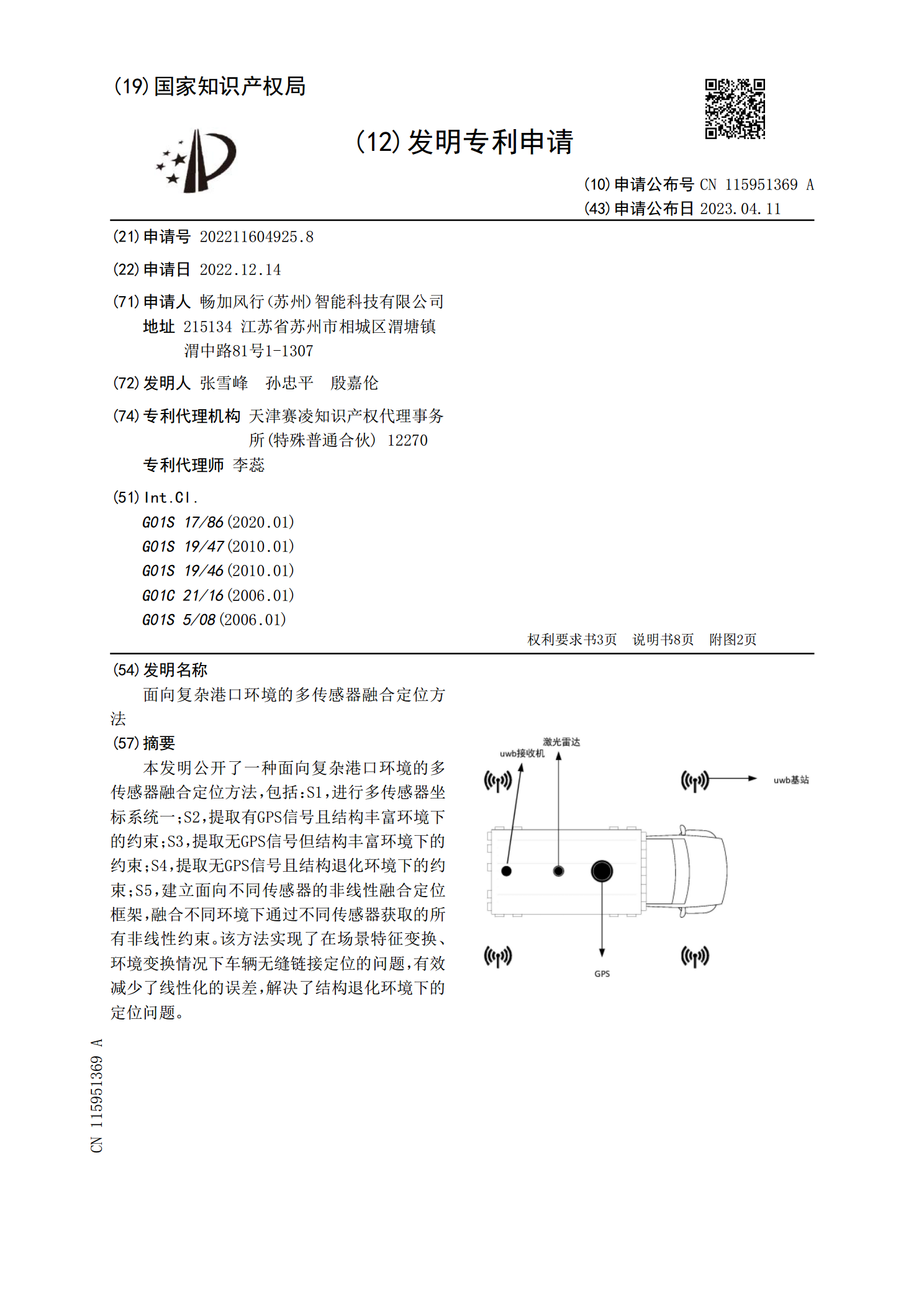
本发明公开了一种面向复杂港口环境的多传感器融合定位方法,包括:S1,进行多传感器坐标系统一;S2,提取有GPS信号且结构丰富环境下的约束;S3,提取无GPS信号但结构丰富环境下的约束;S4,提取无GPS信号且结构退化环境下的约束;S5,建立面向不同传感器的非线性融合定位框架,融合不同环境下通过不同传感器获取的所有非线性约束。该方法实现了在场景特征变换、环境变换情况下车辆无缝链接定位的问题,有效减少了线性化的误差,解决了结构退化环境下的定位问题。
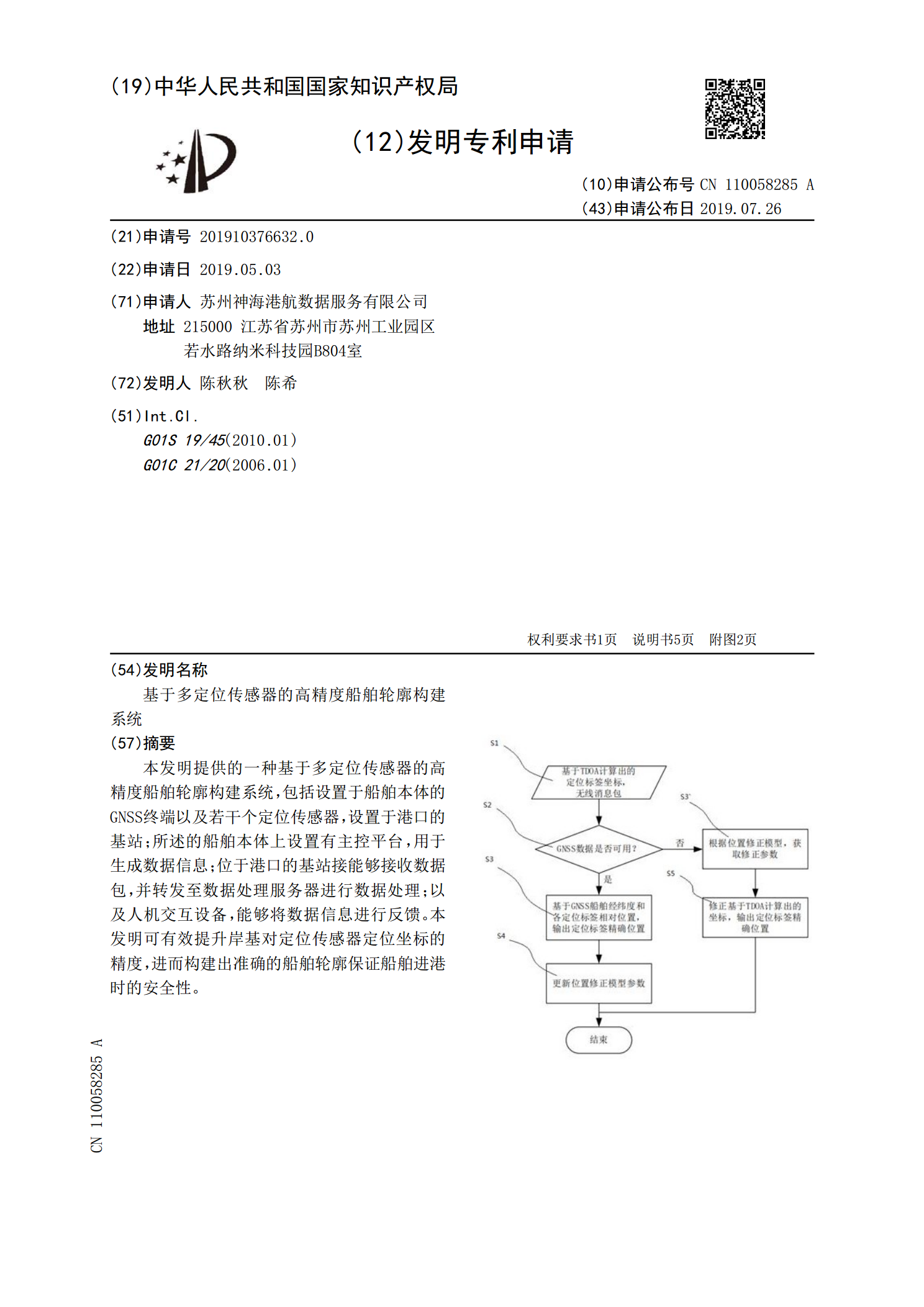
基于多定位传感器的高精度船舶轮廓构建系统.pdf
本发明提供的一种基于多定位传感器的高精度船舶轮廓构建系统,包括设置于船舶本体的GNSS终端以及若干个定位传感器,设置于港口的基站;所述的船舶本体上设置有主控平台,用于生成数据信息;位于港口的基站接能够接收数据包,并转发至数据处理服务器进行数据处理;以及人机交互设备,能够将数据信息进行反馈。本发明可有效提升岸基对定位传感器定位坐标的精度,进而构建出准确的船舶轮廓保证船舶进港时的安全性。