
基于TOF传感器的高精度手术工具定位方法及系统.pdf

绮兰****文章


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于TOF传感器的高精度手术工具定位方法及系统.pdf
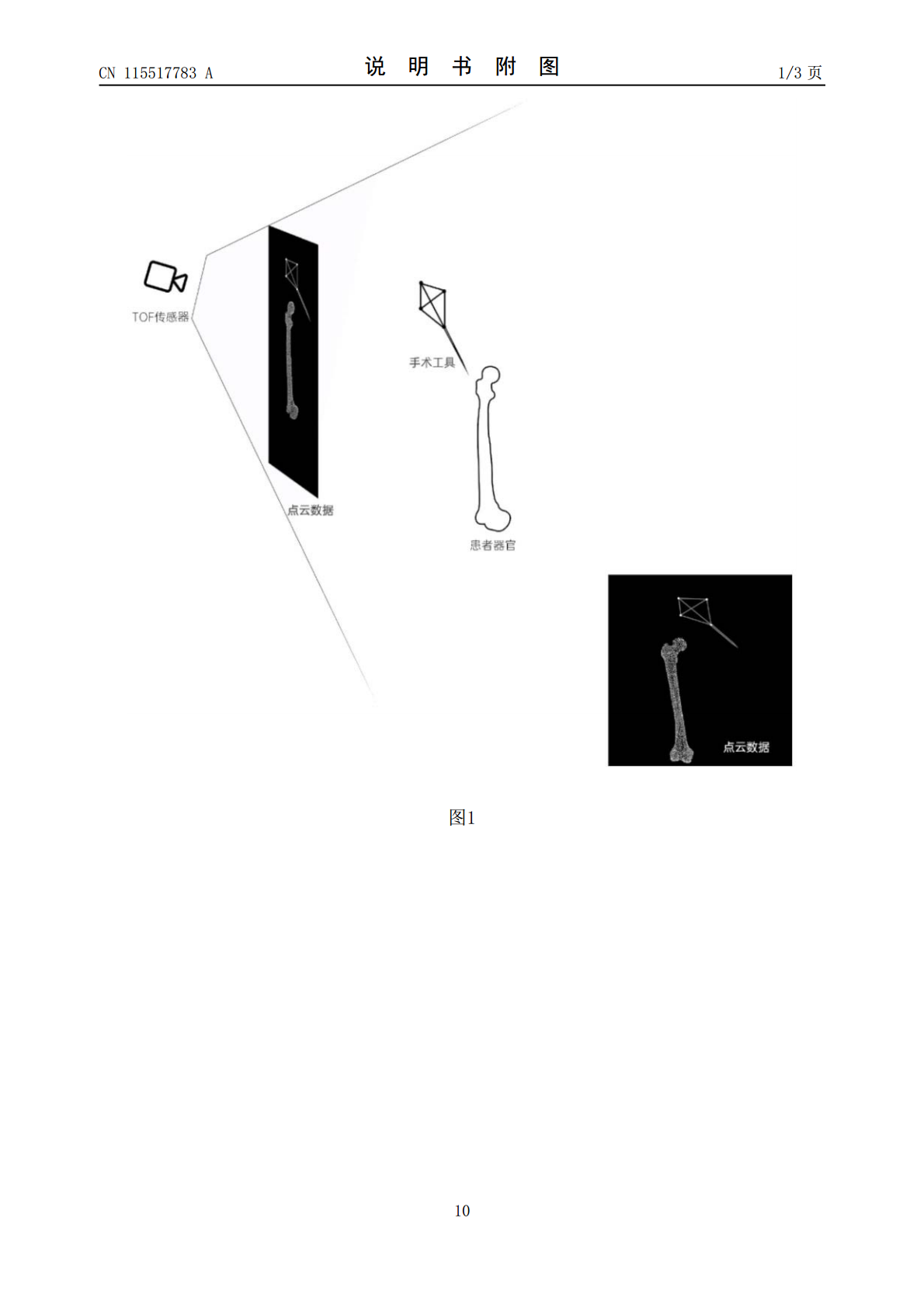
本发明公开了一种基于TOF传感器的高精度手术工具定位方法及系统,属于视觉定位技术领域,该方法包括:术中手术导航时,通过单个TOF传感器,同时实现点云测量物体形状及手术工具高精度定位;通过单个TOF传感器对手术工具上设置的多个反光球进行图像采集,获得反光球的强度图像与深度图像;根据所述强度图像,对反光球进行检测,获取所述各反光球的二维重心坐标;根据所述深度图像,对反光球进行识别,获取各反光球的一一对应关系;采用预设的算法,根据二维坐标和光球三维位置关系精准计算各个反光球姿态。通过本公开的处理方案,极大程度上
基于Android系统的高精度定位系统和方法.pdf
一种基于Android系统的高精度定位系统和方法,包括:定位增强系统和具有Android操作系统的移动终端,其中:移动终端包括:GNSS定位单元、Android操作系统、伪距差分计算单元以及人机交互单元,当移动终端内置的GPS定位无法正常工作时,伪距差分计算单元分别从定位增强系统接收差分数据、从Android操作系统接收来自GNSS定位单元的卫星原始观测数据和星历,通过差分算法获得高精度定位结果并输出至人机交互单元。本发明在伪距差分技术的基础上集成Wi‐Fi热点、基站定位和IP定位技术,在实现快速低成本的
基于ToF相机的座位调节方法、系统、设备和骑行工具.pdf
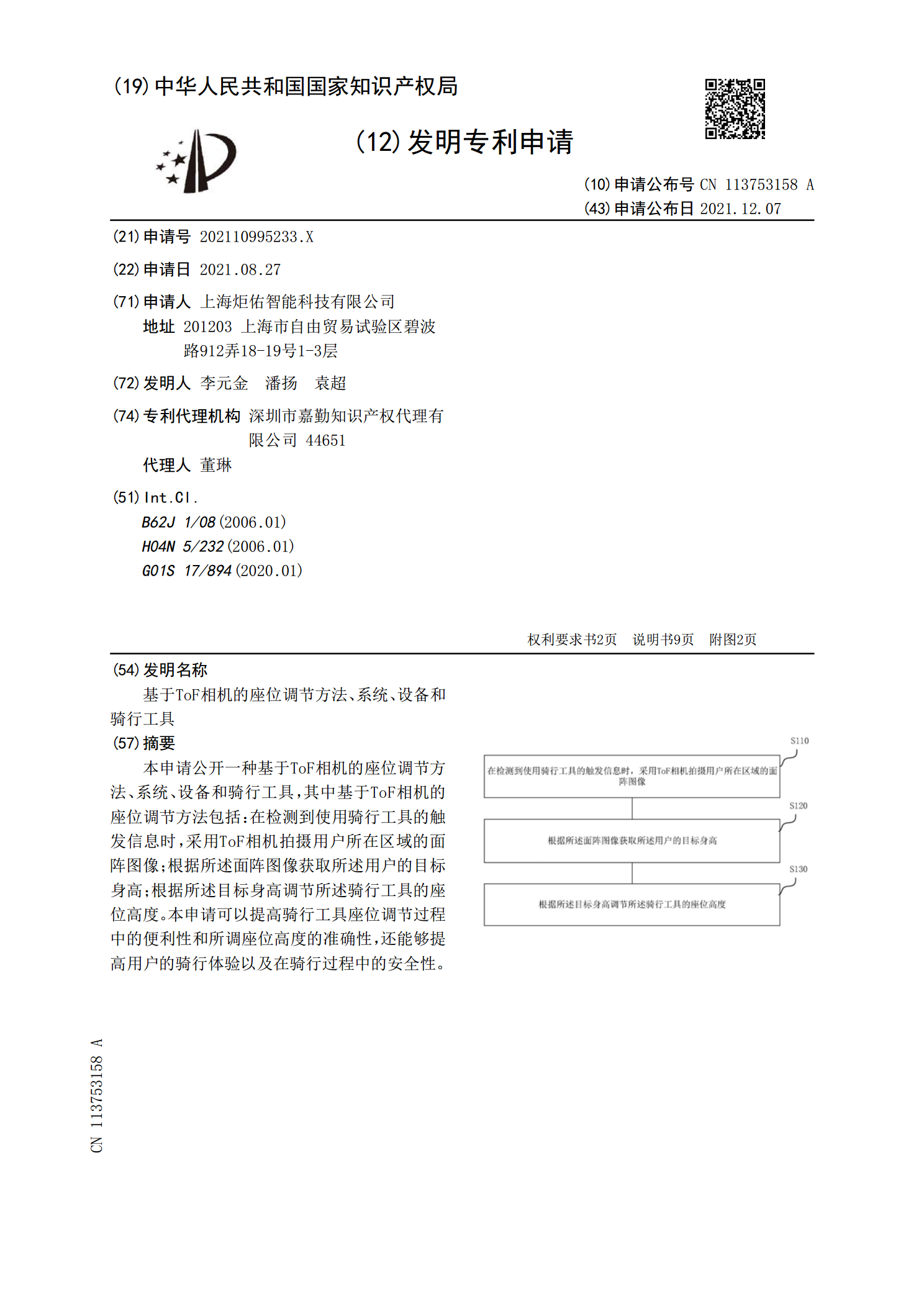
本申请公开一种基于ToF相机的座位调节方法、系统、设备和骑行工具,其中基于ToF相机的座位调节方法包括:在检测到使用骑行工具的触发信息时,采用ToF相机拍摄用户所在区域的面阵图像;根据所述面阵图像获取所述用户的目标身高;根据所述目标身高调节所述骑行工具的座位高度。本申请可以提高骑行工具座位调节过程中的便利性和所调座位高度的准确性,还能够提高用户的骑行体验以及在骑行过程中的安全性。
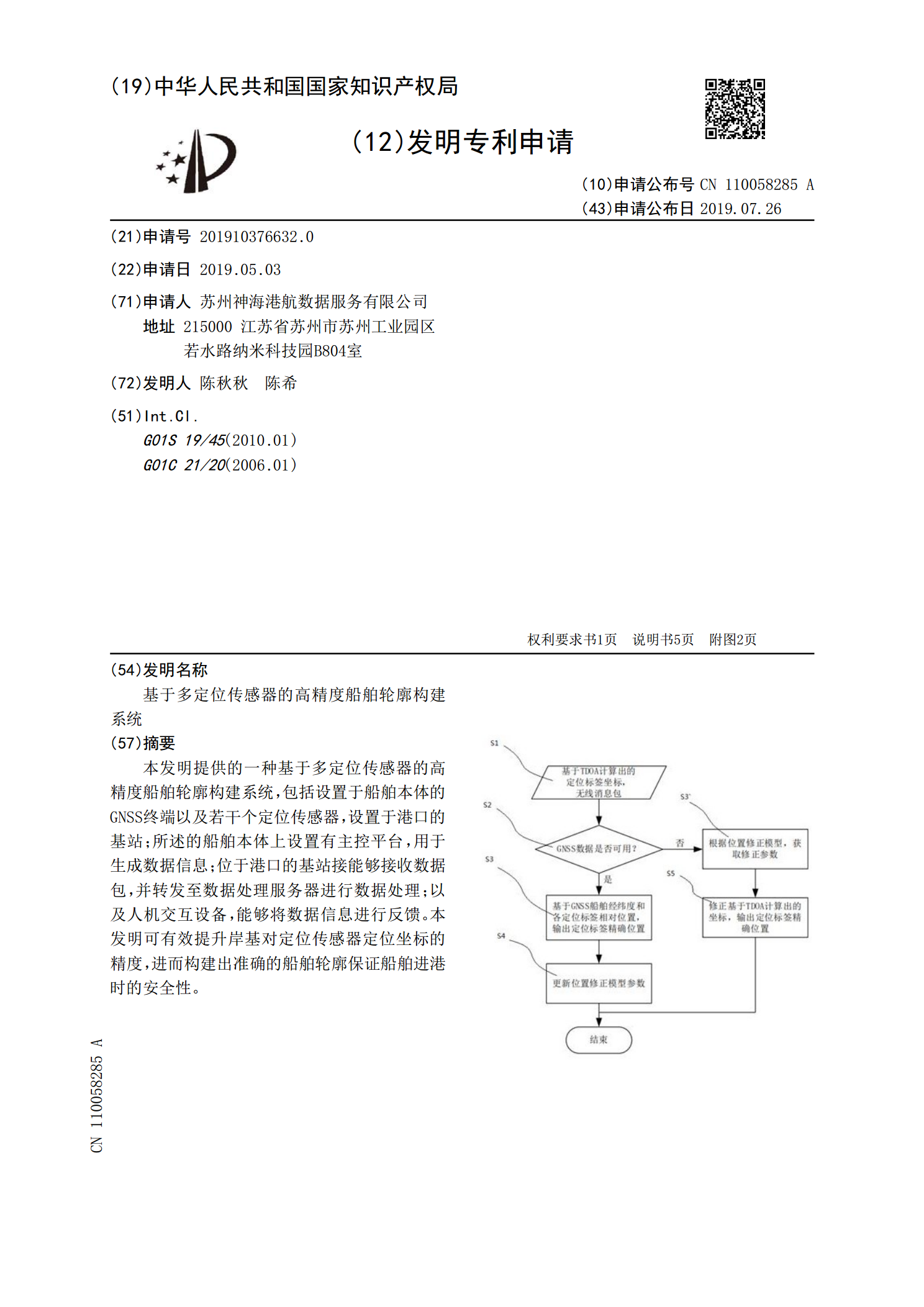
基于多定位传感器的高精度船舶轮廓构建系统.pdf
本发明提供的一种基于多定位传感器的高精度船舶轮廓构建系统,包括设置于船舶本体的GNSS终端以及若干个定位传感器,设置于港口的基站;所述的船舶本体上设置有主控平台,用于生成数据信息;位于港口的基站接能够接收数据包,并转发至数据处理服务器进行数据处理;以及人机交互设备,能够将数据信息进行反馈。本发明可有效提升岸基对定位传感器定位坐标的精度,进而构建出准确的船舶轮廓保证船舶进港时的安全性。
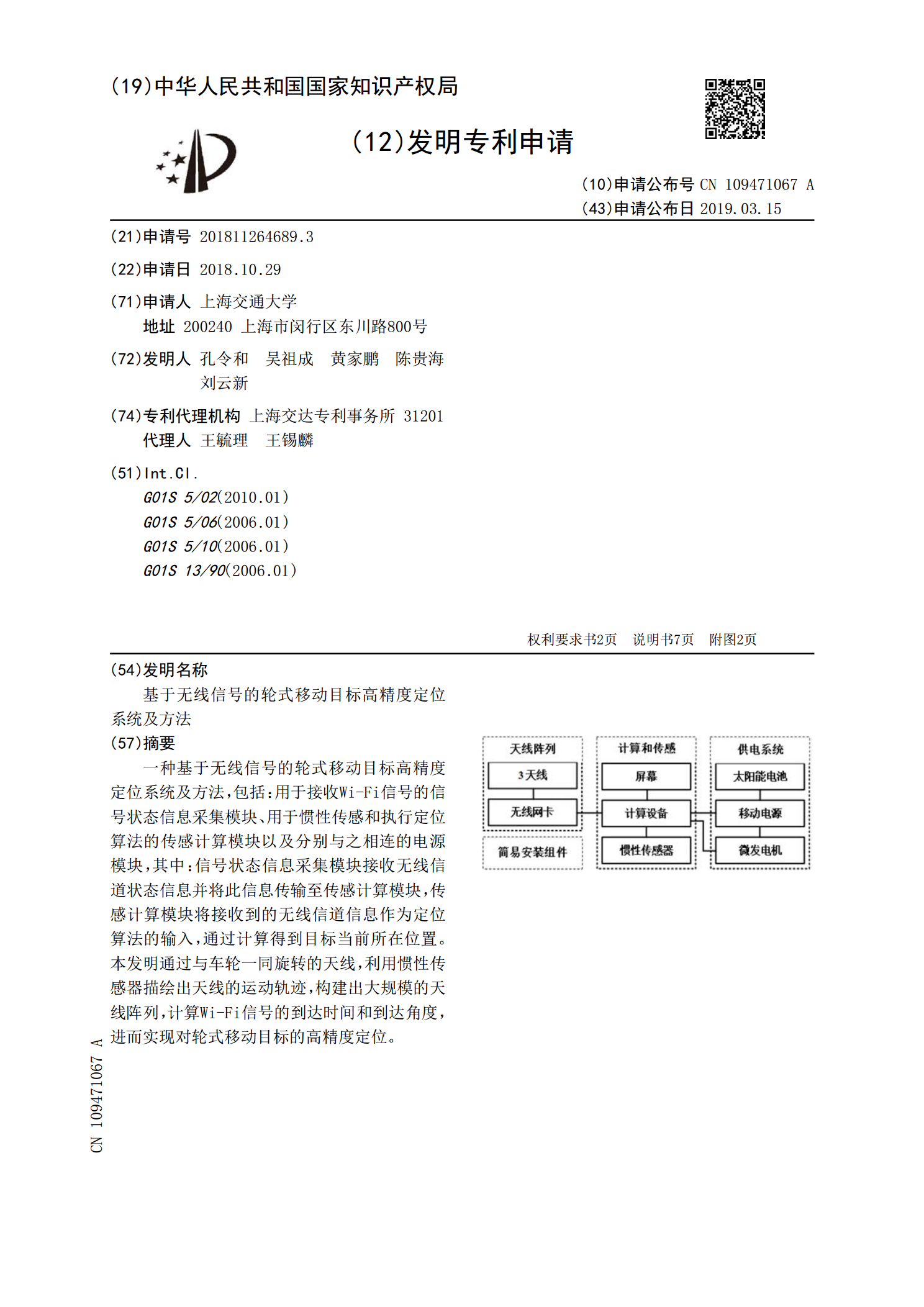
基于无线信号的轮式移动目标高精度定位系统及方法.pdf
一种基于无线信号的轮式移动目标高精度定位系统及方法,包括:用于接收Wi‑Fi信号的信号状态信息采集模块、用于惯性传感和执行定位算法的传感计算模块以及分别与之相连的电源模块,其中:信号状态信息采集模块接收无线信道状态信息并将此信息传输至传感计算模块,传感计算模块将接收到的无线信道信息作为定位算法的输入,通过计算得到目标当前所在位置。本发明通过与车轮一同旋转的天线,利用惯性传感器描绘出天线的运动轨迹,构建出大规模的天线阵列,计算Wi‑Fi信号的到达时间和到达角度,进而实现对轮式移动目标的高精度定位。