
一种机器人行走控制方法.pdf

一吃****永贺


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人行走控制方法.pdf
本发明涉及一种机器人行走控制方法,所述机器人包括控制器、超声波距离传感器、摄像机,所述机器人行走控制方法包括以下步骤:所述控制器控制机器人沿第一预设方向行走;所述超声波距离传感器预设间隔时间内发射超声波探测前方是否有障碍物,若机器人距前方障碍物的距离小于预设值时,启动所述摄像机;所述摄像机采集障碍物图像,得到障碍物类型;根据所述障碍物类型,获取机器人侧面边缘与所述障碍物的最外轮廓点的连线与所述第一预设方向之间的最大夹角;所述机器人向第一预设方向偏移第一预设夹角的第二预设方向行走,所述第一预设夹角大于所述最

一种擦窗机器人的行走控制方法和行走控制装置.pdf
本发明适用于智能家电技术领域,提供了一种擦窗机器人的行走控制方法和行走控制装置,所述行走控制装置包括:气压吸附单元、气压检测单元和行走控制单元;所述气压吸附单元包括主吸附气压仓,以及设置在所述主吸附气压仓周围并与所述主吸附气压仓连通的多个小孔气压仓;所述行走控制单元用于根据所述主吸附气压仓的气压值的变化、小孔气压仓的位置分布以及所述擦窗机器人的运动方向检测与所述擦窗机器人接触的接触面的边界,并根据所述接触面的边界检测结果规划所述擦窗机器人的行走路径,完成对整个接触面的擦拭;不需要额外设置防跌落检测杆检测接

一种机器人沿墙行走的控制方法及装置.pdf
本发明适用于机器控制的技术领域,提供了一种机器人沿墙行走的控制方法及装置,包括:获取所述机器人在机身竖直高度范围内距离障碍物的线阵距离数据或面阵距离数据;根据所述线阵距离数据或所述面阵距离数据,确定所述机器人的沿墙参数;根据所述机器人的沿墙参数控制所述机器人沿墙行走。本发明通过线阵距离数据或面阵距离数据控制所述机器人沿边沿墙,与传统的单点测距相比具有更高的测距准确性,对复杂环境适应性更强。
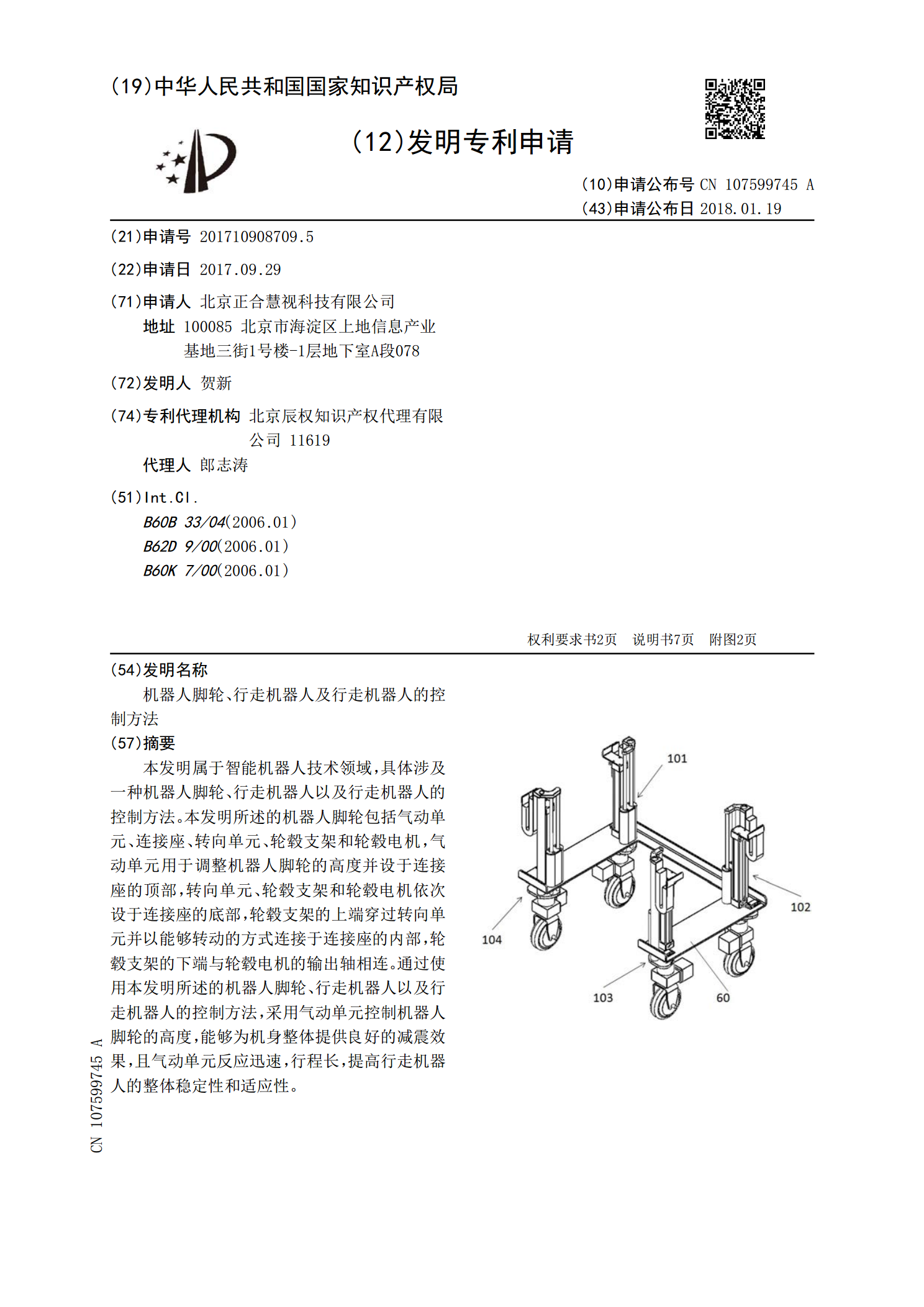
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动
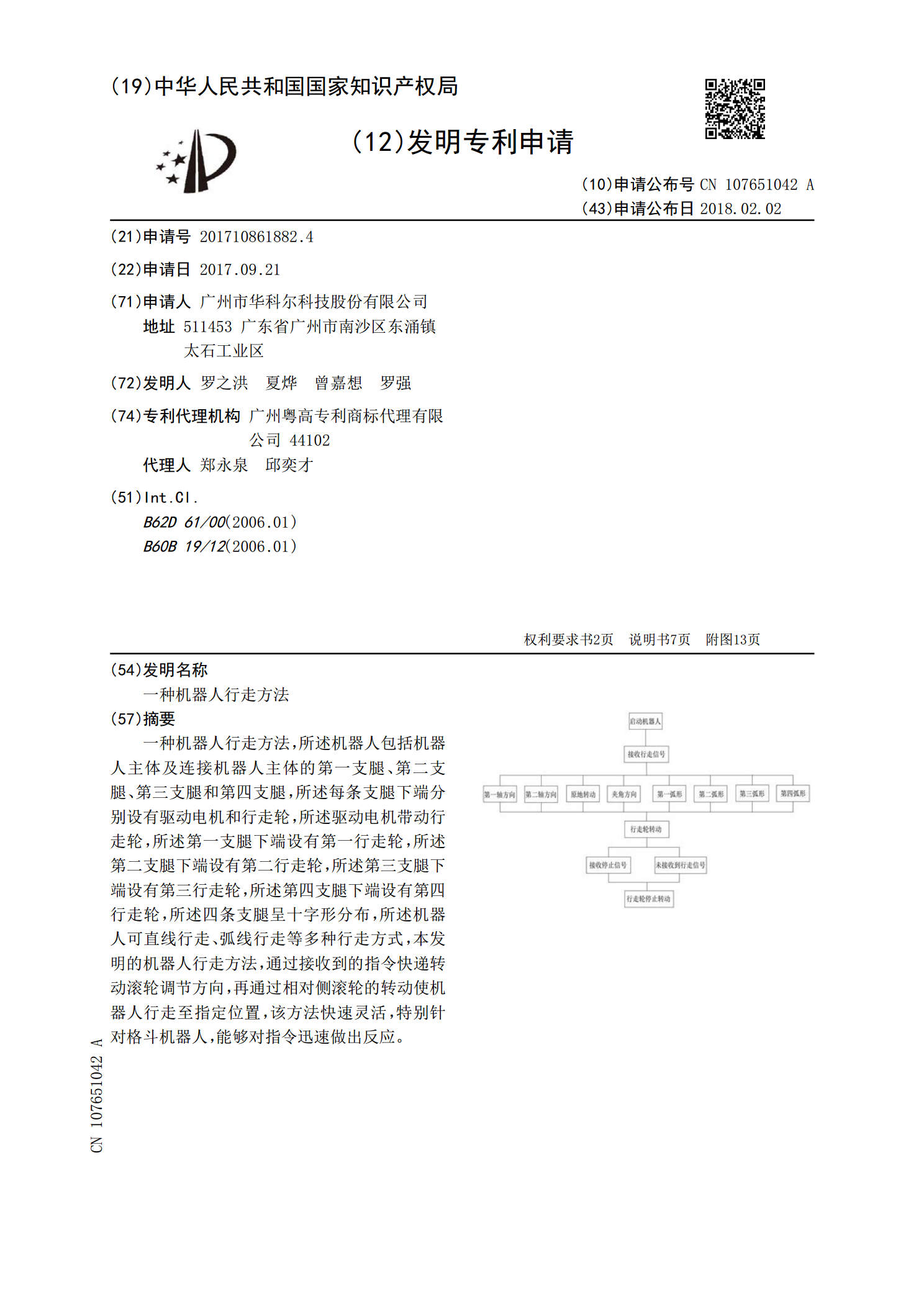
一种机器人行走方法.pdf
一种机器人行走方法,所述机器人包括机器人主体及连接机器人主体的第一支腿、第二支腿、第三支腿和第四支腿,所述每条支腿下端分别设有驱动电机和行走轮,所述驱动电机带动行走轮,所述第一支腿下端设有第一行走轮,所述第二支腿下端设有第二行走轮,所述第三支腿下端设有第三行走轮,所述第四支腿下端设有第四行走轮,所述四条支腿呈十字形分布,所述机器人可直线行走、弧线行走等多种行走方式,本发明的机器人行走方法,通过接收到的指令快递转动滚轮调节方向,再通过相对侧滚轮的转动使机器人行走至指定位置,该方法快速灵活,特别针对格斗机器人