
一种液压支架位姿检测装置和方法.pdf

努力****弘毅


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种液压支架位姿检测装置和方法.pdf
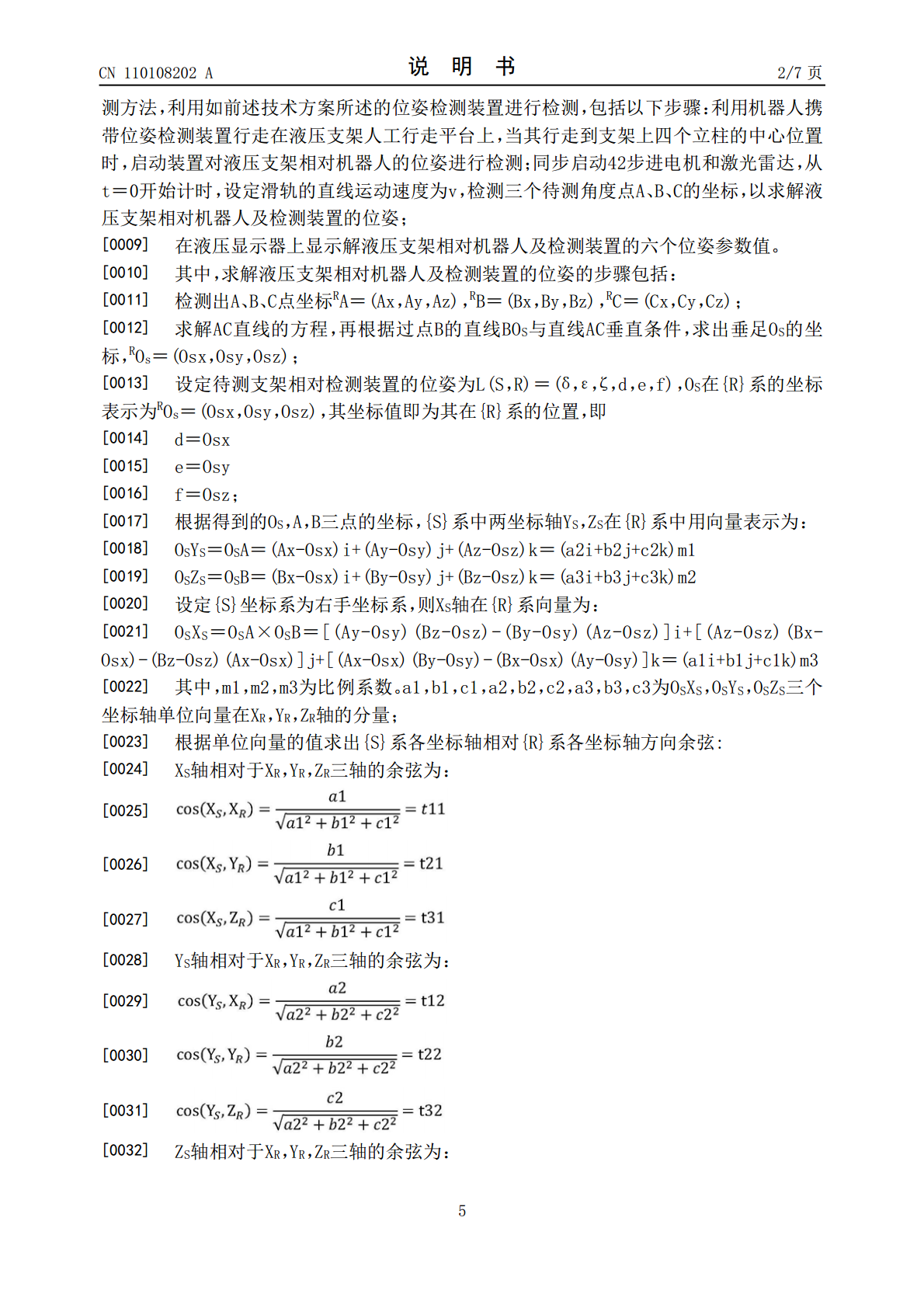
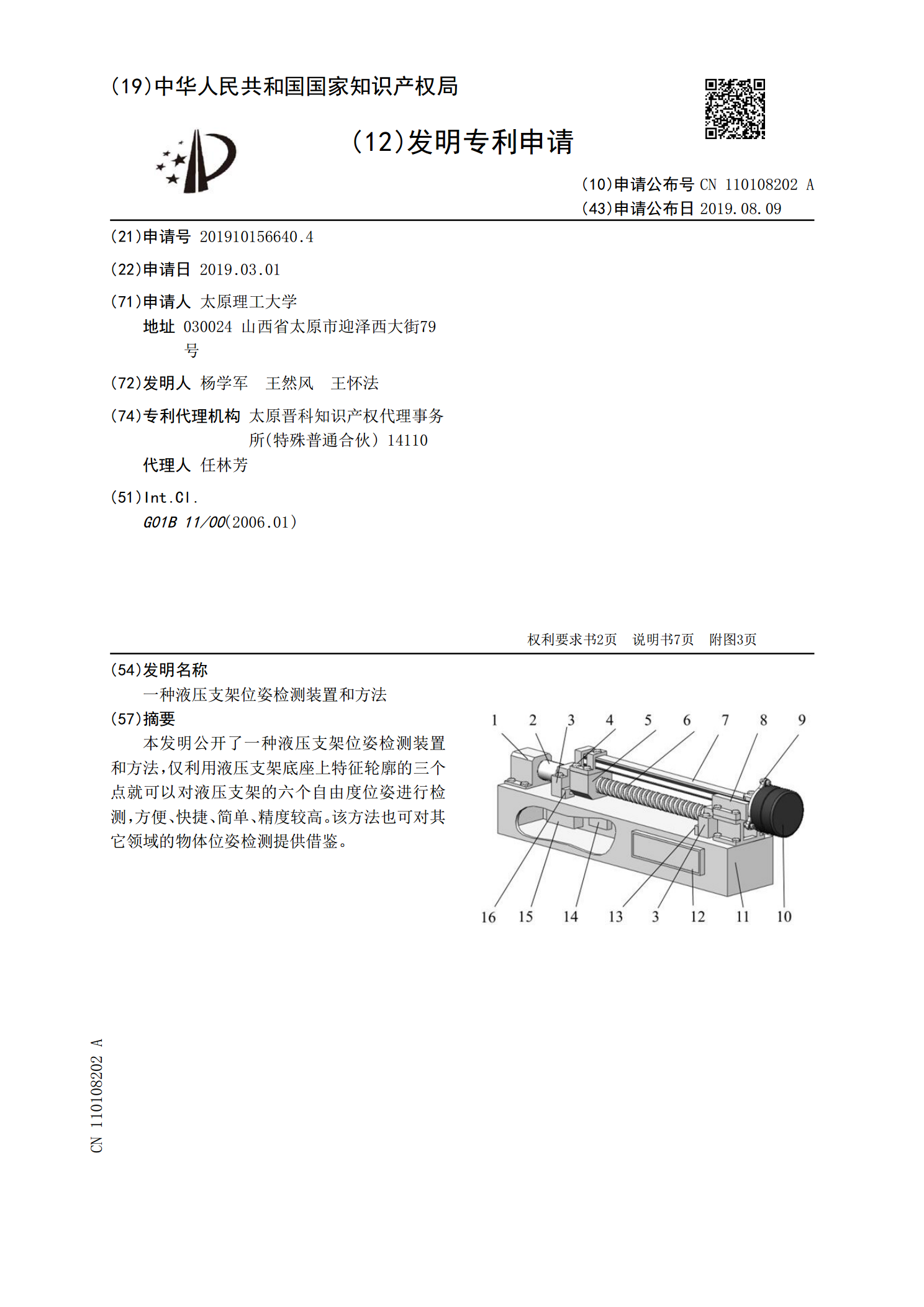
本发明公开了一种液压支架位姿检测装置和方法,仅利用液压支架底座上特征轮廓的三个点就可以对液压支架的六个自由度位姿进行检测,方便、快捷、简单、精度较高。该方法也可对其它领域的物体位姿检测提供借鉴。

基于视觉测量的液压支架位姿检测方法.docx
基于视觉测量的液压支架位姿检测方法一、绪论液压支架是工业生产中使用频率非常高的设备之一,它的主要作用是支撑设备,从而保证设备的安全运行。在设备运行时,液压支架需要承受较高的压力和重量,因此它的稳定性和精度非常重要。在实际生产中,液压支架的位姿检测是非常重要的一项工作,因为它关系到该设备的稳定性和精度,同时也会影响到整个生产线的效率和安全性。因此,液压支架位姿检测的方法和技术的研究具有非常重要的意义。目前,液压支架位姿检测的方法主要分为传统测量和视觉测量两种方式。传统测量主要包括测量仪器、激光测量、测量仪器
一种位姿检测方法、系统及装置.pdf
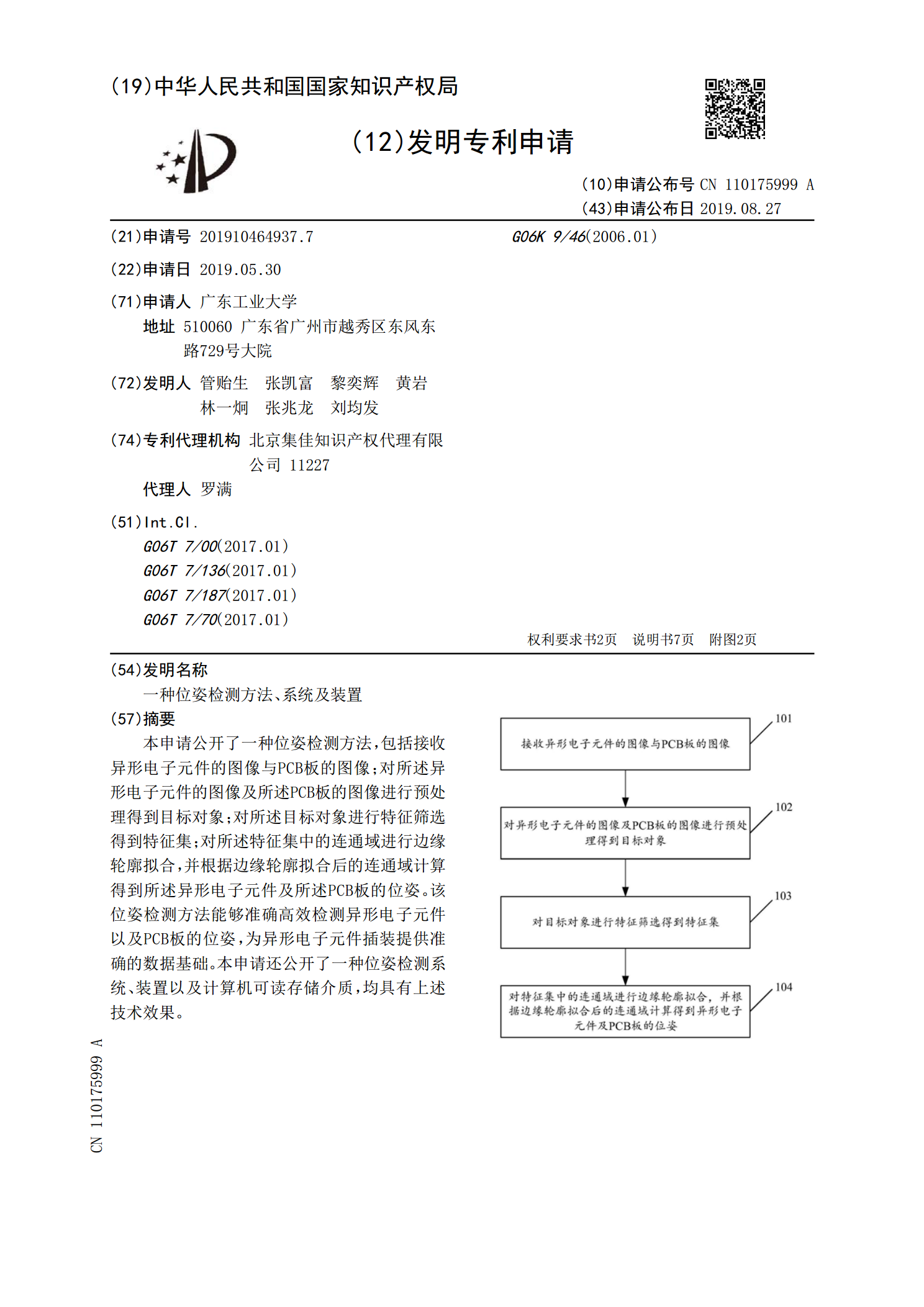
本申请公开了一种位姿检测方法,包括接收异形电子元件的图像与PCB板的图像;对所述异形电子元件的图像及所述PCB板的图像进行预处理得到目标对象;对所述目标对象进行特征筛选得到特征集;对所述特征集中的连通域进行边缘轮廓拟合,并根据边缘轮廓拟合后的连通域计算得到所述异形电子元件及所述PCB板的位姿。该位姿检测方法能够准确高效检测异形电子元件以及PCB板的位姿,为异形电子元件插装提供准确的数据基础。本申请还公开了一种位姿检测系统、装置以及计算机可读存储介质,均具有上述技术效果。

液压传动机构位姿检测方法分析.docx
液压传动机构位姿检测方法分析液压传动机构位姿检测方法分析随着机械制造技术的不断发展,液压技术在机械传动中被广泛应用,液压传动机构由于具有高效、节能和可靠性等优点,已成为机械传动领域的主流技术之一。在实际应用中,为确保液压传动机构的稳定性和工作效率,需要对其位姿进行检测和监控。本文将从液压传动机构的位姿检测目标、检测方法和检测技术等方面进行分析和探讨。一、液压传动机构的位姿检测目标液压传动机构是一种通过压力传递力和动量的机械传动方式,其主要由液压泵、液压阀、液压缸和工作装置等部分组成。在液压传动机构中,正确

一种目标位姿测量方法和装置.pdf
本发明提供一种目标位姿测量方法和装置,确定两站相机拍摄的目标影像序列、目标模型以及模拟的成像空间,还包括:循环执行N1至N7,直至目标影像序列中所有图片中的目标均被确定位姿:N1:提取目标影像序列中当前帧的两站图片中目标轮廓线;N2:计算当前帧的两站图片中目标的重心坐标;N3:确定目标模型在所述模拟的成像空间中的位置;N4:获取模拟的成像空间中目标模型的模拟图片,并提取模拟图片的模拟轮廓线;N5:将模拟轮廓线与对应的目标轮廓线进行匹配;N6:确定目标的当前姿态;N7:判断当前帧是否为目标影像序列中的最后一