
一种机械抓取装置.pdf

一条****ee

1/7
2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械抓取装置.pdf
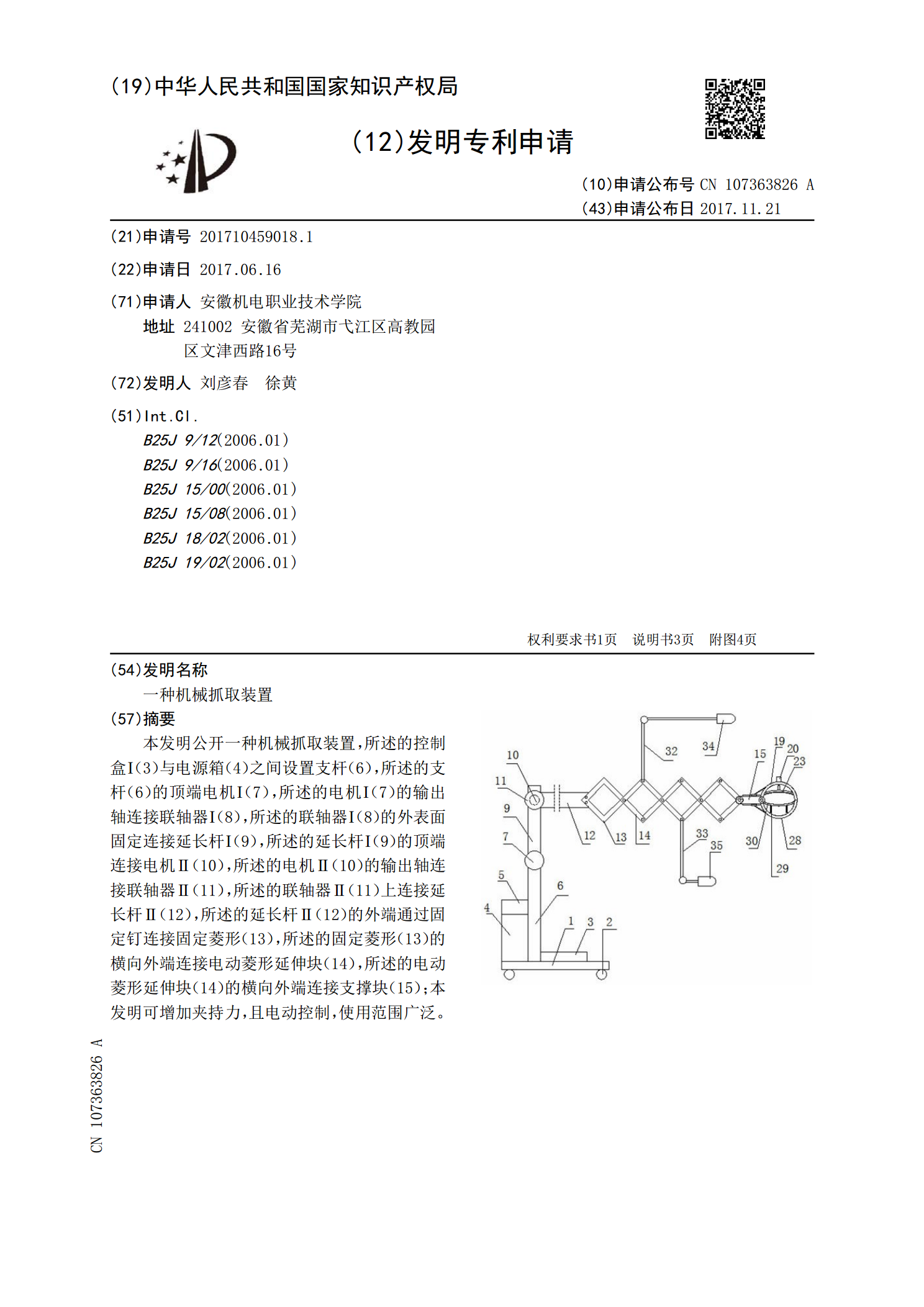
本发明公开一种机械抓取装置,所述的控制盒Ⅰ(3)与电源箱(4)之间设置支杆(6),所述的支杆(6)的顶端电机Ⅰ(7),所述的电机Ⅰ(7)的输出轴连接联轴器Ⅰ(8),所述的联轴器Ⅰ(8)的外表面固定连接延长杆Ⅰ(9),所述的延长杆Ⅰ(9)的顶端连接电机Ⅱ(10),所述的电机Ⅱ(10)的输出轴连接联轴器Ⅱ(11),所述的联轴器Ⅱ(11)上连接延长杆Ⅱ(12),所述的延长杆Ⅱ(12)的外端通过固定钉连接固定菱形(13),所述的固定菱形(13)的横向外端连接电动菱形延伸块(14),所述的电动菱形延伸块(14)的横
一种机械抓取装置.pdf
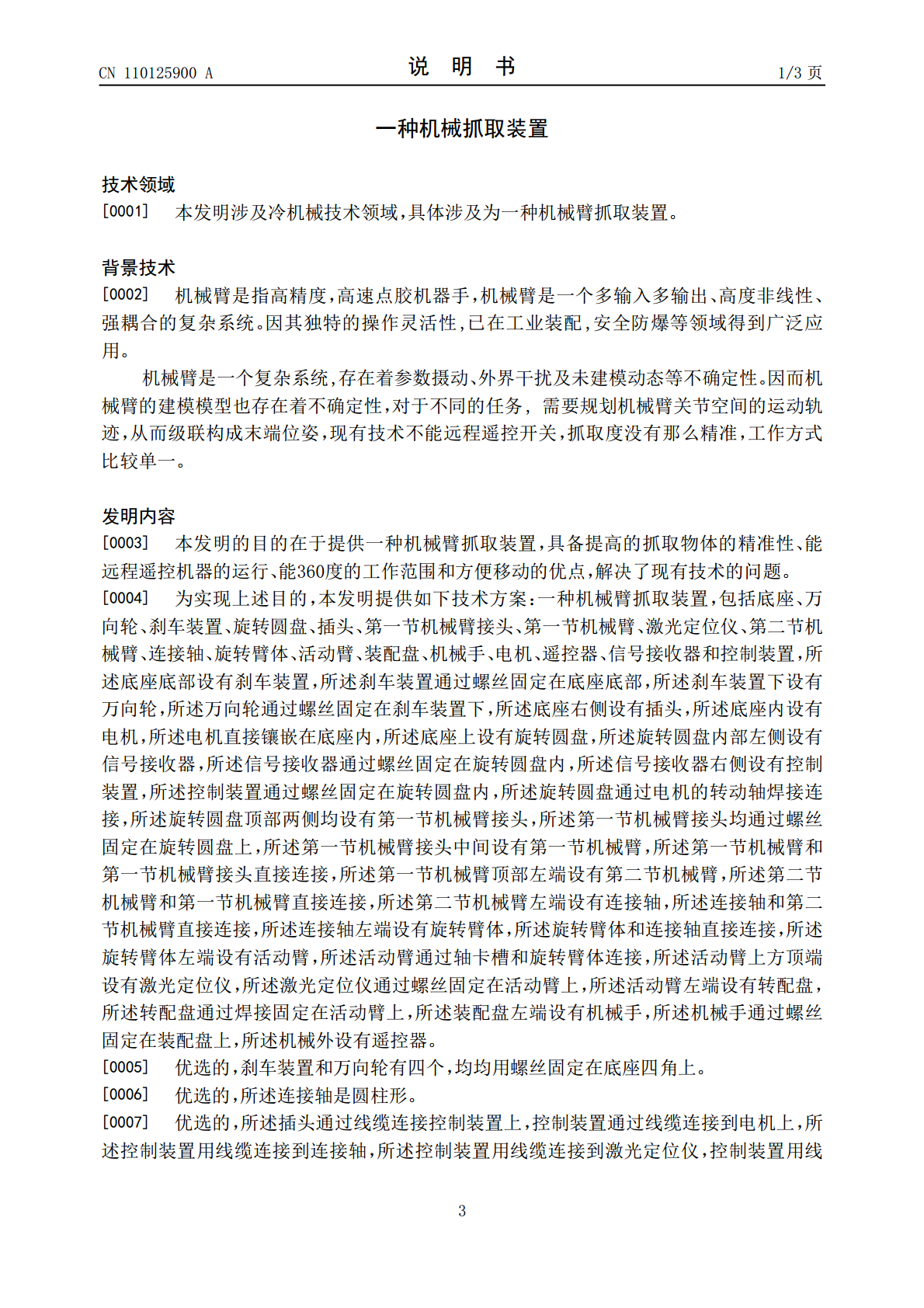
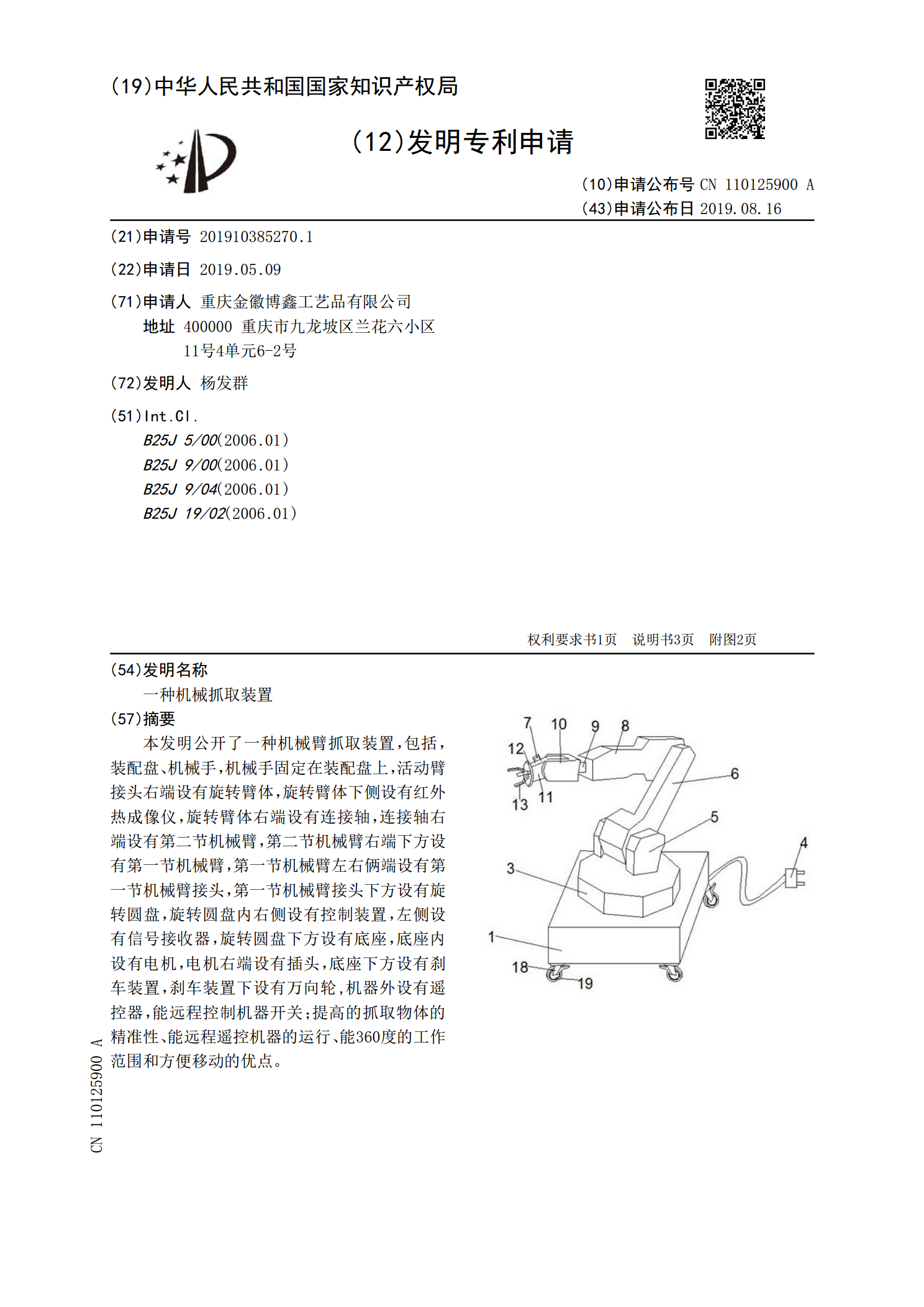
本发明公开了一种机械臂抓取装置,包括,装配盘、机械手,机械手固定在装配盘上,活动臂接头右端设有旋转臂体,旋转臂体下侧设有红外热成像仪,旋转臂体右端设有连接轴,连接轴右端设有第二节机械臂,第二节机械臂右端下方设有第一节机械臂,第一节机械臂左右俩端设有第一节机械臂接头,第一节机械臂接头下方设有旋转圆盘,旋转圆盘内右侧设有控制装置,左侧设有信号接收器,旋转圆盘下方设有底座,底座内设有电机,电机右端设有插头,底座下方设有刹车装置,刹车装置下设有万向轮,机器外设有遥控器,能远程控制机器开关;提高的抓取物体的精准性、
一种机械抓取装置.pdf
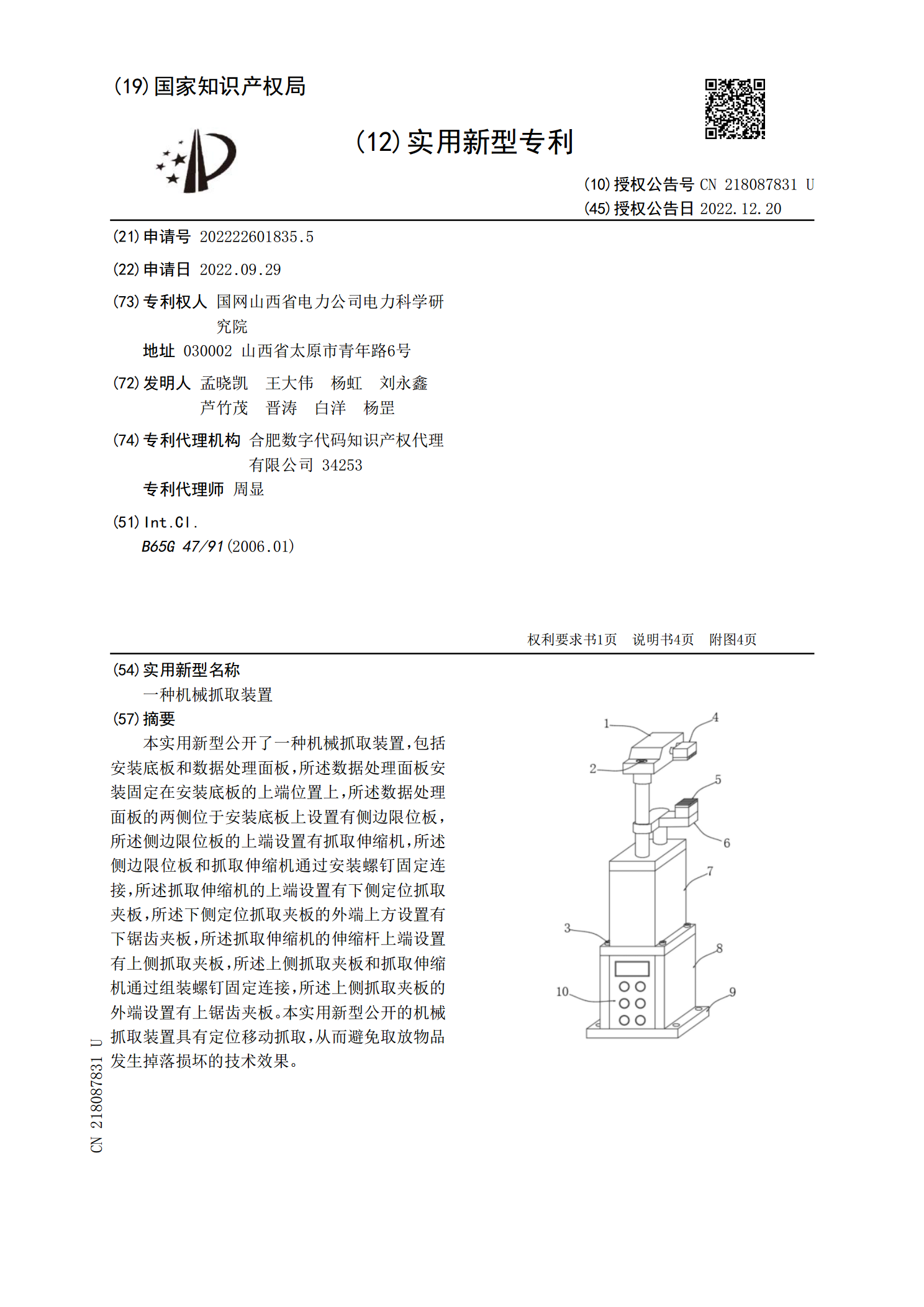
本实用新型公开了一种机械抓取装置,包括安装底板和数据处理面板,所述数据处理面板安装固定在安装底板的上端位置上,所述数据处理面板的两侧位于安装底板上设置有侧边限位板,所述侧边限位板的上端设置有抓取伸缩机,所述侧边限位板和抓取伸缩机通过安装螺钉固定连接,所述抓取伸缩机的上端设置有下侧定位抓取夹板,所述下侧定位抓取夹板的外端上方设置有下锯齿夹板,所述抓取伸缩机的伸缩杆上端设置有上侧抓取夹板,所述上侧抓取夹板和抓取伸缩机通过组装螺钉固定连接,所述上侧抓取夹板的外端设置有上锯齿夹板。本实用新型公开的机械抓取装置具有
一种机械抓取装置.pdf
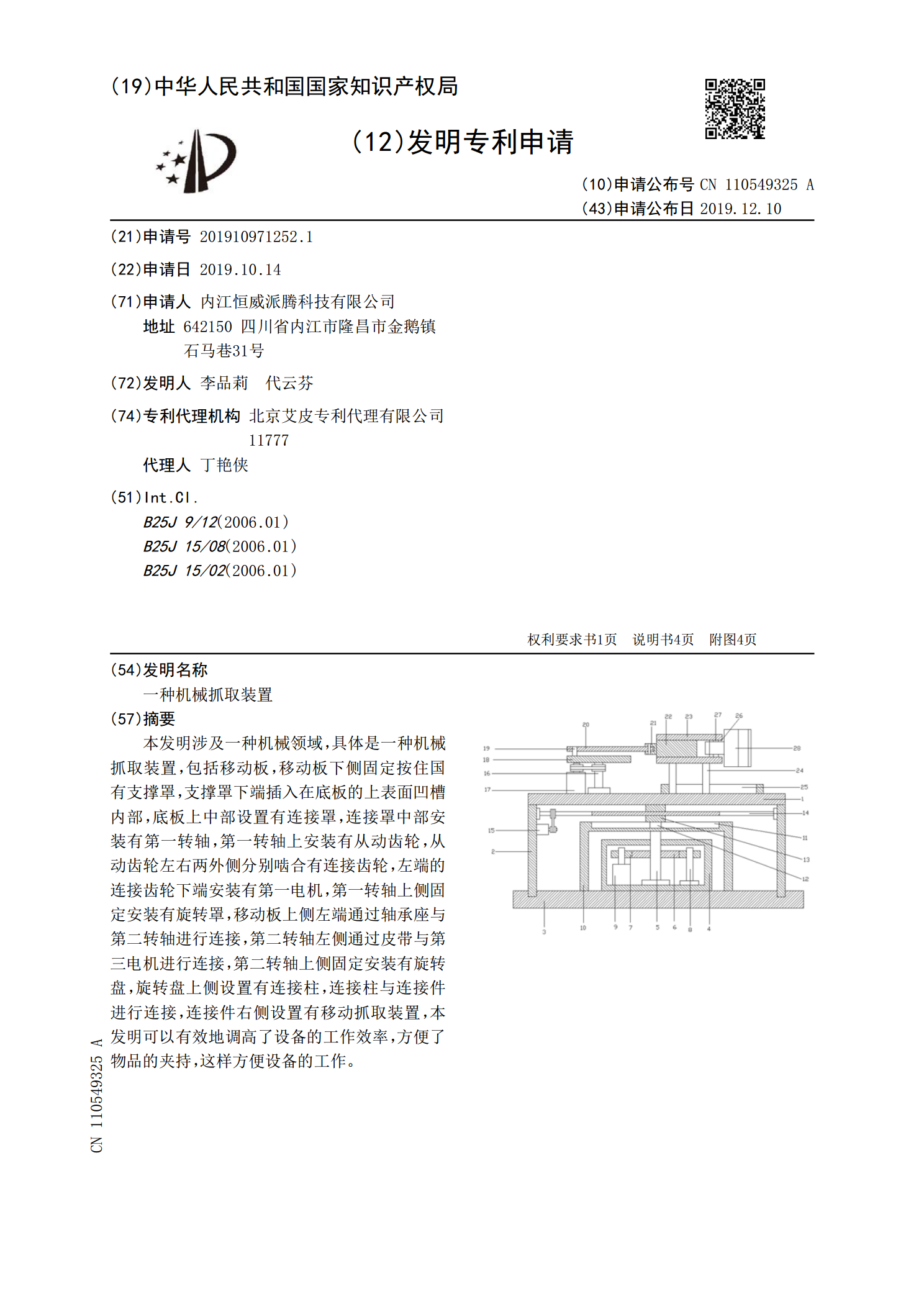
本发明涉及一种机械领域,具体是一种机械抓取装置,包括移动板,移动板下侧固定按住国有支撑罩,支撑罩下端插入在底板的上表面凹槽内部,底板上中部设置有连接罩,连接罩中部安装有第一转轴,第一转轴上安装有从动齿轮,从动齿轮左右两外侧分别啮合有连接齿轮,左端的连接齿轮下端安装有第一电机,第一转轴上侧固定安装有旋转罩,移动板上侧左端通过轴承座与第二转轴进行连接,第二转轴左侧通过皮带与第三电机进行连接,第二转轴上侧固定安装有旋转盘,旋转盘上侧设置有连接柱,连接柱与连接件进行连接,连接件右侧设置有移动抓取装置,本发明可以有
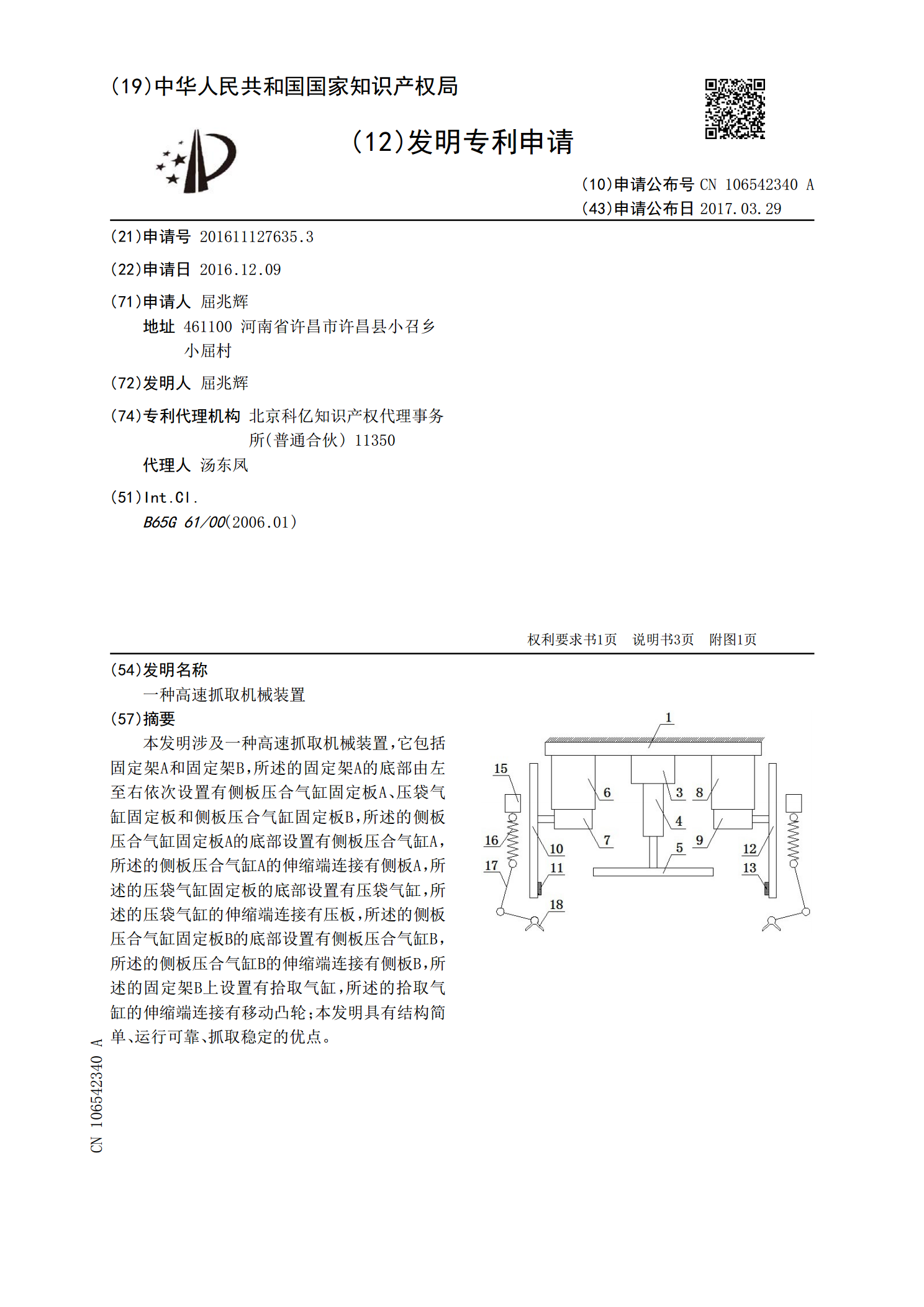
一种高速抓取机械装置.pdf
本发明涉及一种高速抓取机械装置,它包括固定架A和固定架B,所述的固定架A的底部由左至右依次设置有侧板压合气缸固定板A、压袋气缸固定板和侧板压合气缸固定板B,所述的侧板压合气缸固定板A的底部设置有侧板压合气缸A,所述的侧板压合气缸A的伸缩端连接有侧板A,所述的压袋气缸固定板的底部设置有压袋气缸,所述的压袋气缸的伸缩端连接有压板,所述的侧板压合气缸固定板B的底部设置有侧板压合气缸B,所述的侧板压合气缸B的伸缩端连接有侧板B,所述的固定架B上设置有拾取气缸,所述的拾取气缸的伸缩端连接有移动凸轮;本发明具有结构简