
一种爬楼轮椅及爬楼方法.pdf

猫巷****志敏

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种爬楼轮椅及爬楼方法.pdf
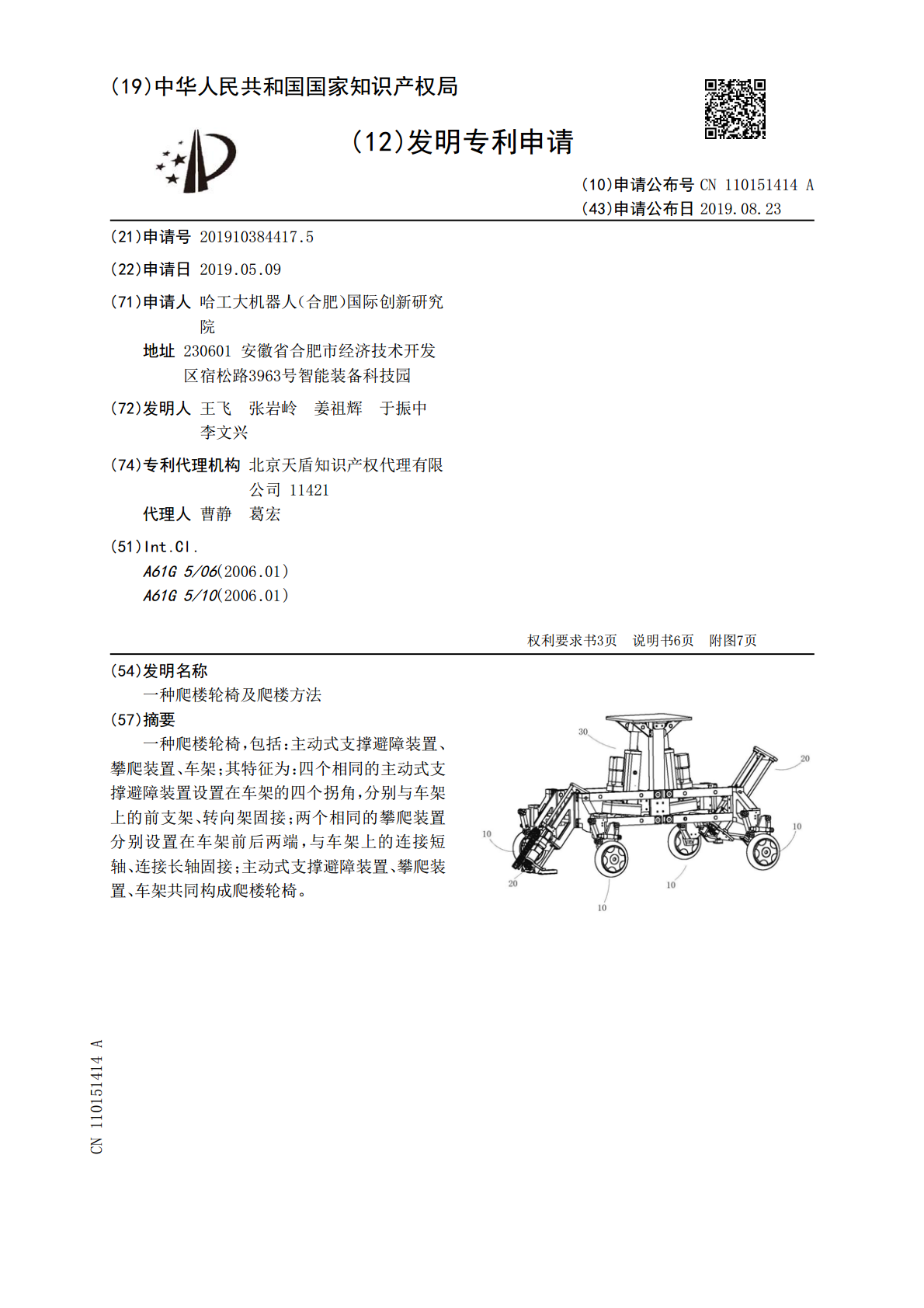
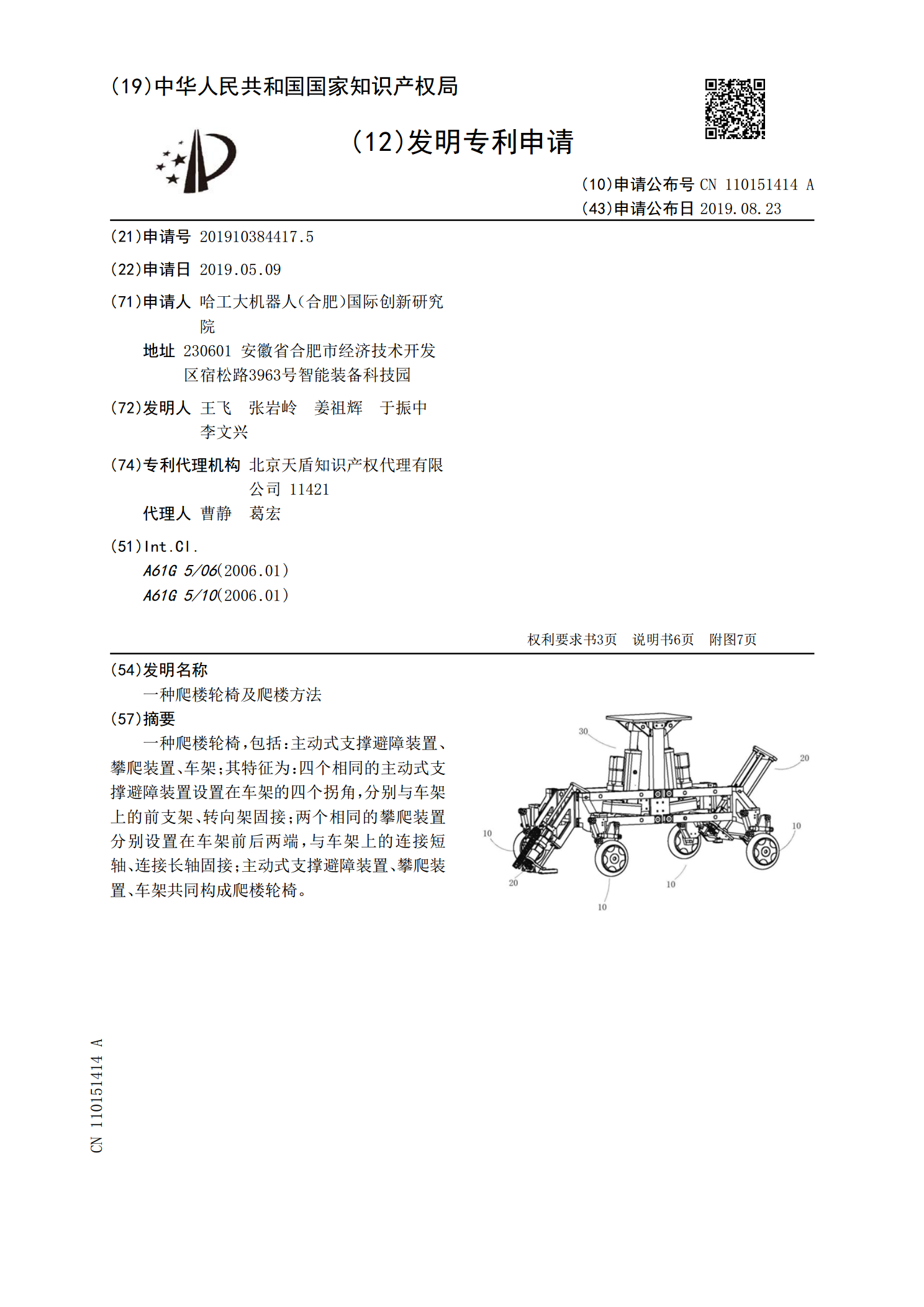
一种爬楼轮椅,包括:主动式支撑避障装置、攀爬装置、车架;其特征为:四个相同的主动式支撑避障装置设置在车架的四个拐角,分别与车架上的前支架、转向架固接;两个相同的攀爬装置分别设置在车架前后两端,与车架上的连接短轴、连接长轴固接;主动式支撑避障装置、攀爬装置、车架共同构成爬楼轮椅。

一种爬楼轮、爬楼行走机构、爬楼轮椅架和全自动爬楼轮椅.pdf
本发明公开了爬楼轮、爬楼行走机构、爬楼轮椅架和全自动爬楼轮椅,属于爬楼轮椅领域。爬楼轮,包括后轮总成和前轮总成,所述后轮总成和前轮总成均包括轮架;爬楼行走机构,包括爬楼轮,还包括相连的前支架和后支架;爬楼轮椅架,包括座椅架和所述的爬楼行走机构,所述座椅架底侧滑动连接有滑动板,全自动爬楼轮椅,包括所述的爬楼有轮椅架和座椅,所述座椅连接在座椅架上;本发明性能安全可靠既能在平地活动又可以上下楼梯的全自动爬楼梯轮。

爬楼方法及爬楼轮组及带有该轮组的爬楼轮椅.pdf
本发明涉及移动装置领域,公开了一种爬楼方法及爬楼轮组及带有该轮组的爬楼轮椅,其包括连接架(4),连接架(4)的一端安装有伸缩支撑杆(5),连接架(4)的另一端安装有爬行轮,爬行轮包括内(2)和外轮(3),连接架(4)上安装有内轮轴(20)和外轮轴(30),内轮(2)有三个,外轮轴(30)上固装有外轮架(31)并带动其转动,外轮(3)有四个;还包括安装在连接架(4)上内轮驱动装置(6)和外轮驱动装置(7)。本发明本申请中的爬楼梯机构与市面常见的爬楼机截然不同,此机构结构简单,成本较低;智能控制,操纵方便;刹

一种多功能越障爬楼轮椅及越障爬楼方法.pdf
本发明公开了一种多功能越障爬楼轮椅,涉及轮椅技术领域,包括:轮椅骨架、前驱动轮、后驱动轮、驱动电机、攀越机构。攀越机构包括:连接轴、传动部、推拉部、支撑部、攀越部一、攀越部二。本发明通过传动部的旋转以驱动推拉部在支撑部的作用下实现推拉部左上抬时则其右下压以及左右横移工作,实现像人一样能够行走并攀越楼梯的目的。本发明的采用联动的方式实现攀越楼梯的工作,该结构简单,并且不进行攀越工作时,攀越部二能够在伸缩装置的作用下进行折叠,使得前驱动轮与后驱动轮与地面接触实现地面行走运动,解决在平地行走时动作缓慢的问题。

一种爬楼轮椅.pdf
本发明涉及一种爬楼轮椅。爬楼轮椅,包括座椅和位于座椅下方的可爬楼梯的行走机构,所述座椅与行走机构之间设有水平机构,水平机构包括与座椅固连的上推排和与行走机构固连的下推排,上推排与下推排之间铰接有两个相对设置的连接杆,上推排、下推排与两个连接杆形成连杆机构,爬楼梯时下推排倾斜固定角度,上推排保持水平。以上推排为机架,连杆机构有一个自由度,通过连杆机构结构设计,能够实现下推排倾斜固定角度时,上推排保持水平,从而实现爬楼梯时保持座椅水平的功能,结构简单、使用方便,降低轮椅造价,易于保养和维护。