
一种停车机器人轮胎夹持臂.pdf

Th****s3


1/9

2/9

3/9
4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种停车机器人轮胎夹持臂.pdf
本发明公开了一种停车机器人轮胎夹持臂,包括夹持臂主体,所述夹持臂主体包括夹持臂上部和夹持臂下部,且夹持臂上部的下端焊接在夹持臂下部的上端,所述夹持臂上部和夹持臂下部的形状均为L型,所述夹持臂上部和夹持臂下部的内部均开设有中空腔体。本发明所述的一种停车机器人轮胎夹持臂,首先,能够大幅度减轻夹持臂重量,使轮胎夹持臂轻量化,从而提升AGV的运行效率和续航能力,减少了能源的消耗,其次,减少轮胎夹持臂对轮胎的磨损,提高轮胎的使用寿命,最后,还能够将夹持臂连接起来共同运动,提高汽车轮胎固定效果,防止汽车轮胎松动滑落,

一种轮胎夹持机械臂.pdf
一种轮胎夹持机械臂,属于机械式立体停车设备技术领域。包括滑道、两个对称设置的拉动板、两对称夹臂、平动装置及摆动装置,所述拉动板一端置于滑道的滑道槽内连接平动装置,夹臂连接端和滑道的导向轨道两端部上均带有接触时配合连接的摆动装置,通过平动装置带动两夹臂平行移动,移动到滑道的导向轨道两端时,通过摆动装置带动夹臂摆动。本发明实现了在一个动力源的作用下,实现机械手臂的平动夹持和摆动展开两个运动过程;结构简单、可靠性好,在同样的运动和输出力需求下,便于降低结构的高度。
一种轮胎夹臂装置及轮胎夹持装置.pdf
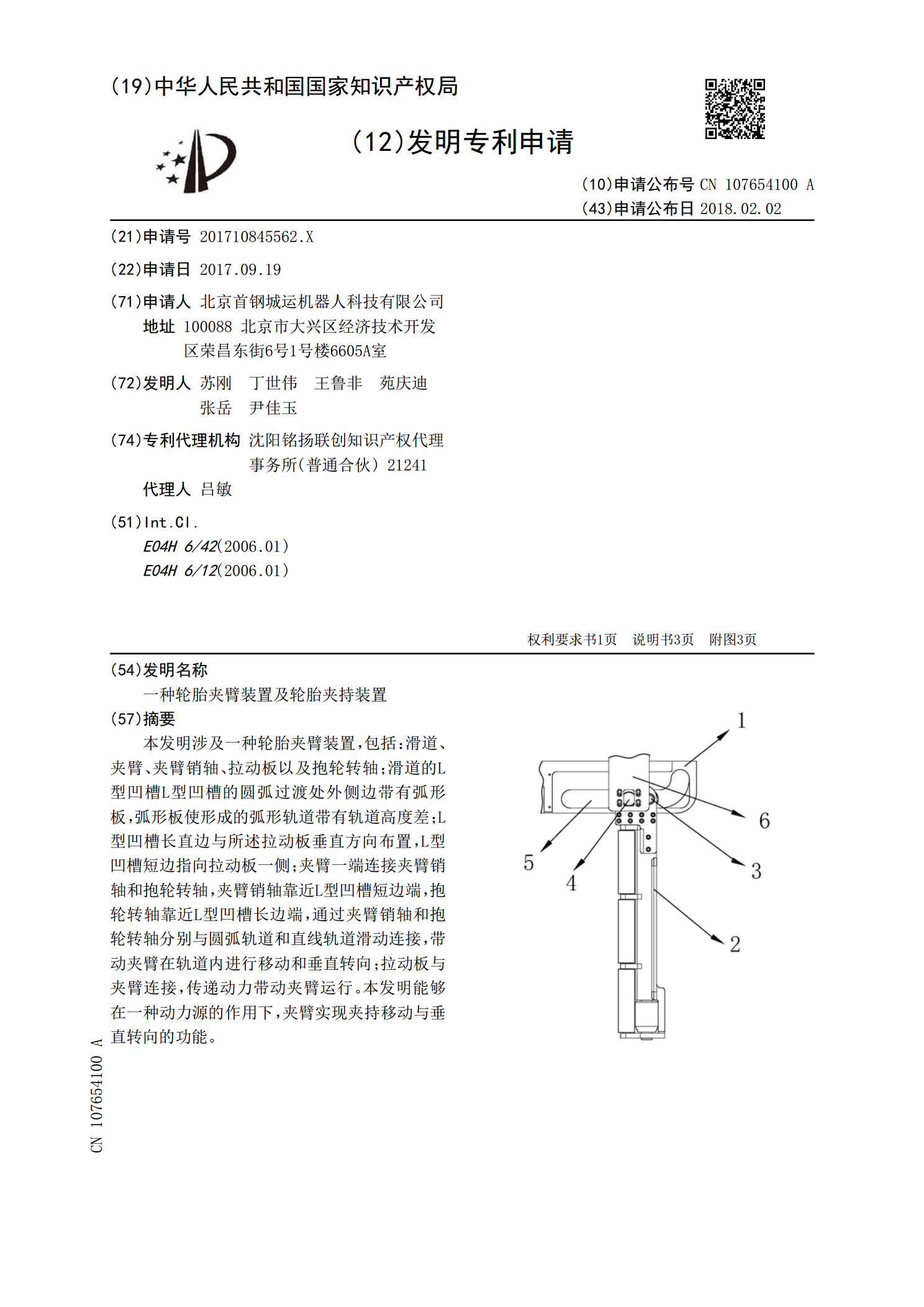
本发明涉及一种轮胎夹臂装置,包括:滑道、夹臂、夹臂销轴、拉动板以及抱轮转轴;滑道的L型凹槽L型凹槽的圆弧过渡处外侧边带有弧形板,弧形板使形成的弧形轨道带有轨道高度差;L型凹槽长直边与所述拉动板垂直方向布置,L型凹槽短边指向拉动板一侧;夹臂一端连接夹臂销轴和抱轮转轴,夹臂销轴靠近L型凹槽短边端,抱轮转轴靠近L型凹槽长边端,通过夹臂销轴和抱轮转轴分别与圆弧轨道和直线轨道滑动连接,带动夹臂在轨道内进行移动和垂直转向;拉动板与夹臂连接,传递动力带动夹臂运行。本发明能够在一种动力源的作用下,夹臂实现夹持移动与垂直转
一种轮胎夹持臂驱动设备.pdf
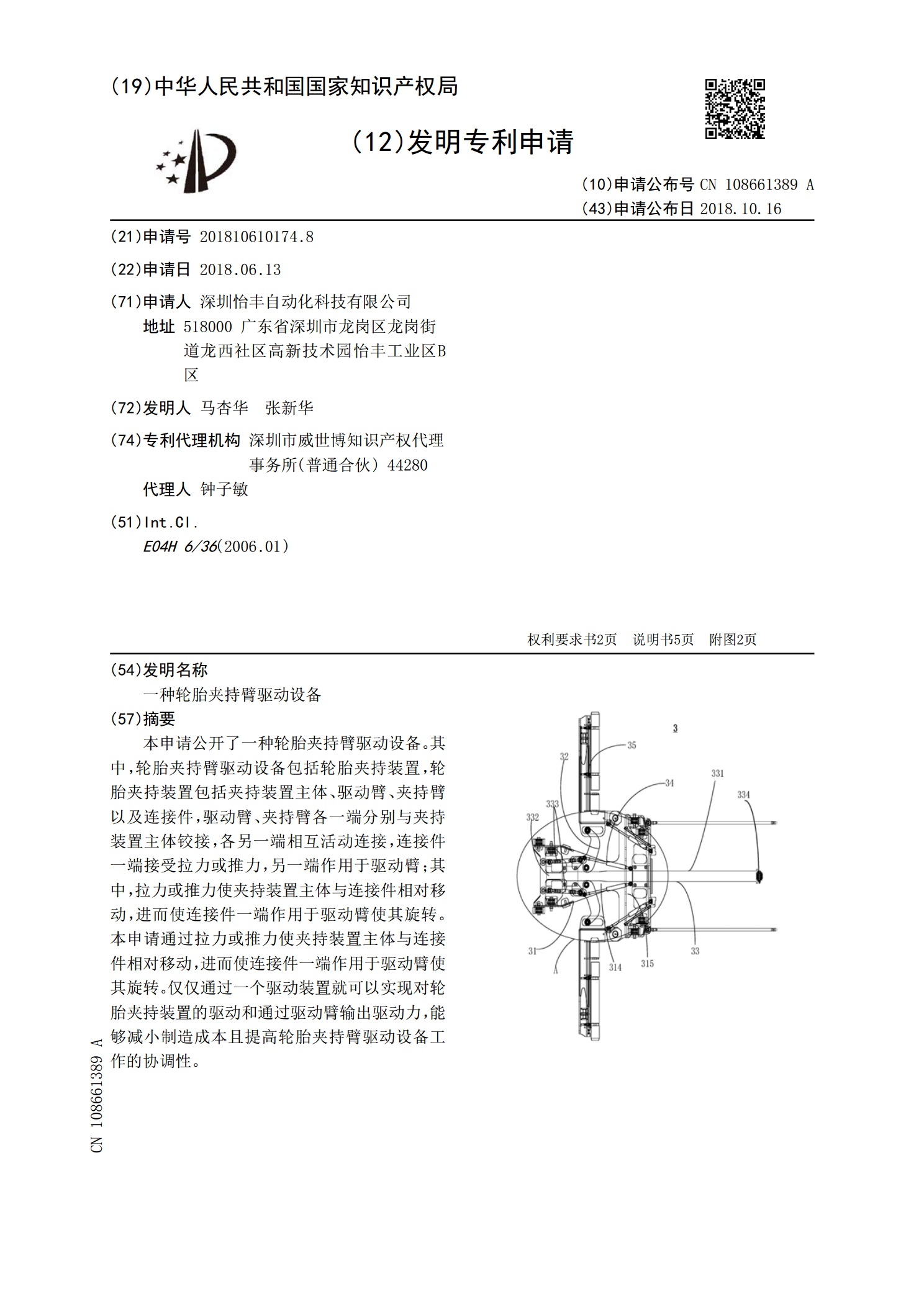
本申请公开了一种轮胎夹持臂驱动设备。其中,轮胎夹持臂驱动设备包括轮胎夹持装置,轮胎夹持装置包括夹持装置主体、驱动臂、夹持臂以及连接件,驱动臂、夹持臂各一端分别与夹持装置主体铰接,各另一端相互活动连接,连接件一端接受拉力或推力,另一端作用于驱动臂;其中,拉力或推力使夹持装置主体与连接件相对移动,进而使连接件一端作用于驱动臂使其旋转。本申请通过拉力或推力使夹持装置主体与连接件相对移动,进而使连接件一端作用于驱动臂使其旋转。仅仅通过一个驱动装置就可以实现对轮胎夹持装置的驱动和通过驱动臂输出驱动力,能够减小制造成
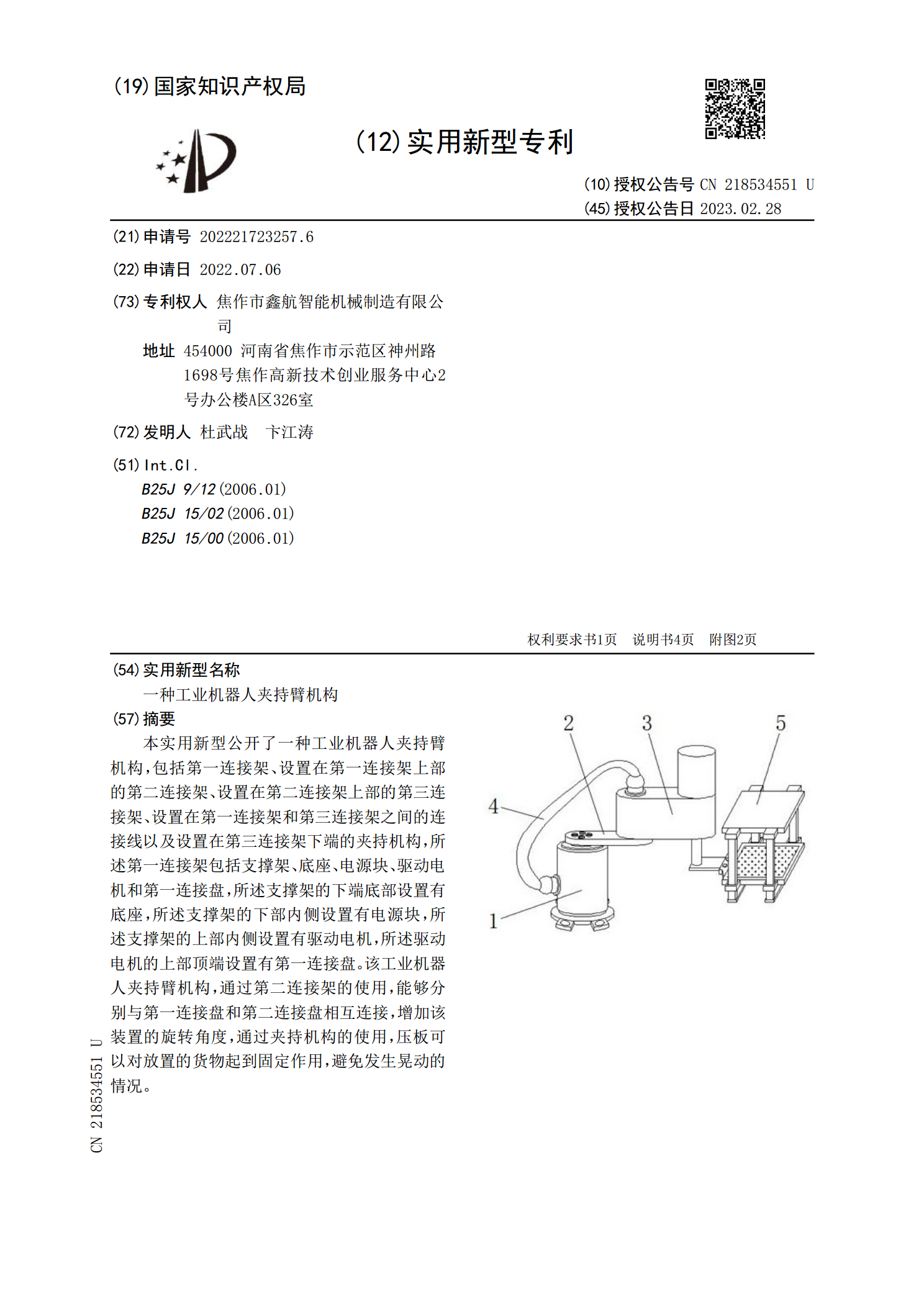
一种工业机器人夹持臂机构.pdf
本实用新型公开了一种工业机器人夹持臂机构,包括第一连接架、设置在第一连接架上部的第二连接架、设置在第二连接架上部的第三连接架、设置在第一连接架和第三连接架之间的连接线以及设置在第三连接架下端的夹持机构,所述第一连接架包括支撑架、底座、电源块、驱动电机和第一连接盘,所述支撑架的下端底部设置有底座,所述支撑架的下部内侧设置有电源块,所述支撑架的上部内侧设置有驱动电机,所述驱动电机的上部顶端设置有第一连接盘。该工业机器人夹持臂机构,通过第二连接架的使用,能够分别与第一连接盘和第二连接盘相互连接,增加该装置的旋转