
一种便携式管道焊接机器人.pdf

雨星****萌娃


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种便携式管道焊接机器人.pdf
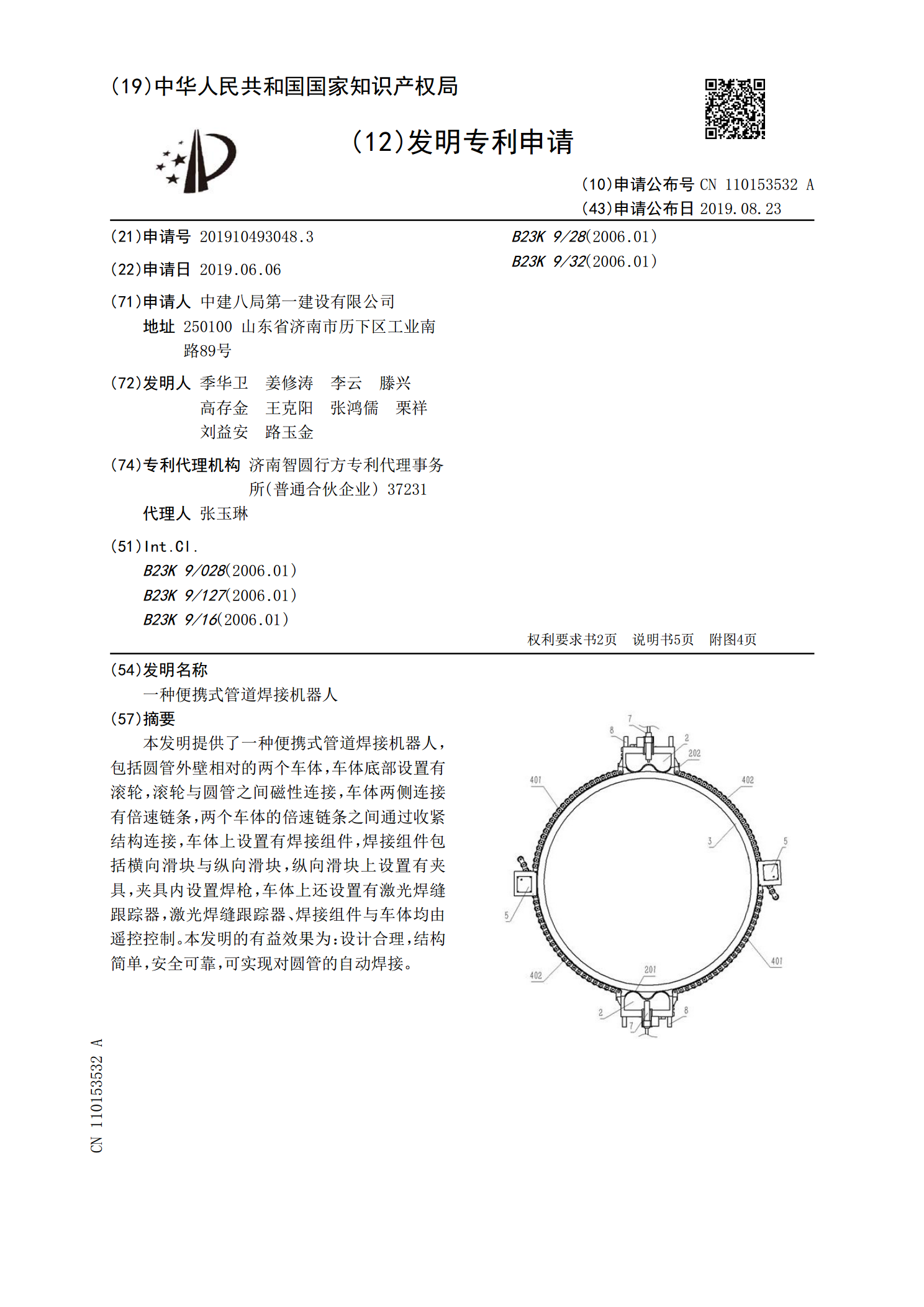
本发明提供了一种便携式管道焊接机器人,包括圆管外壁相对的两个车体,车体底部设置有滚轮,滚轮与圆管之间磁性连接,车体两侧连接有倍速链条,两个车体的倍速链条之间通过收紧结构连接,车体上设置有焊接组件,焊接组件包括横向滑块与纵向滑块,纵向滑块上设置有夹具,夹具内设置焊枪,车体上还设置有激光焊缝跟踪器,激光焊缝跟踪器、焊接组件与车体均由遥控控制。本发明的有益效果为:设计合理,结构简单,安全可靠,可实现对圆管的自动焊接。
一种管道焊接夹具、管道焊接机器人及管道焊接方法.pdf
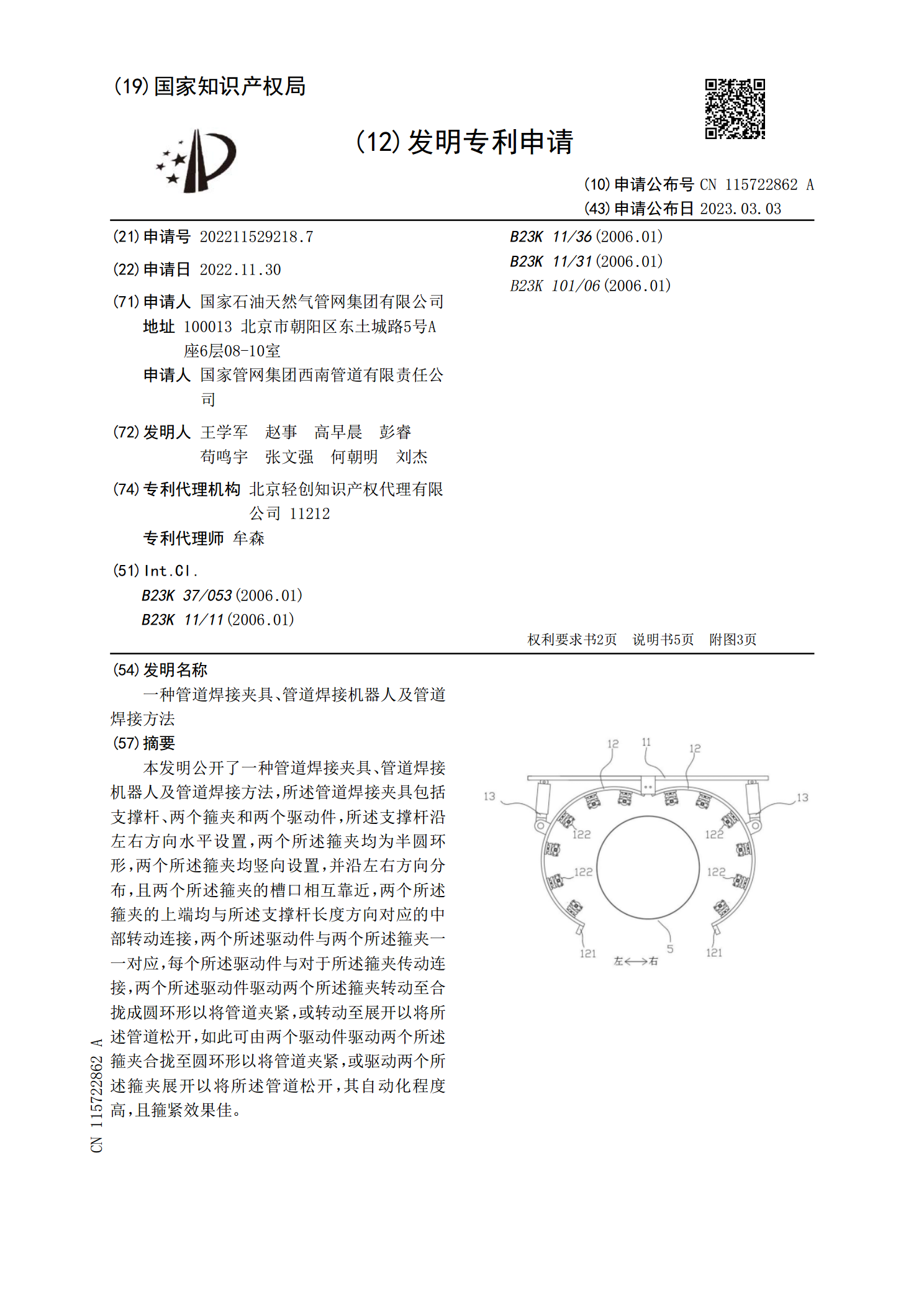
本发明公开了一种管道焊接夹具、管道焊接机器人及管道焊接方法,所述管道焊接夹具包括支撑杆、两个箍夹和两个驱动件,所述支撑杆沿左右方向水平设置,两个所述箍夹均为半圆环形,两个所述箍夹均竖向设置,并沿左右方向分布,且两个所述箍夹的槽口相互靠近,两个所述箍夹的上端均与所述支撑杆长度方向对应的中部转动连接,两个所述驱动件与两个所述箍夹一一对应,每个所述驱动件与对于所述箍夹传动连接,两个所述驱动件驱动两个所述箍夹转动至合拢成圆环形以将管道夹紧,或转动至展开以将所述管道松开,如此可由两个驱动件驱动两个所述箍夹合拢至圆环

一种管道焊接机器人.pdf
本发明公开了一种管道焊接机器人,涉及野外管道焊接技术领域,解决了现有技术中管道焊接机器人焊接效率低的问题,其技术要点是:包括固定导轨,固定导轨内设有活动导轨,固定导轨上设有驱动电机,驱动电机通过驱动齿轮与活动导轨啮合,活动导轨上设有用于驱动焊枪在活动导轨上滑动的滑动架,滑动架与活动导轨滑动连接,滑动架上设有用于驱动滑动架滑动的驱动电机和驱动齿轮,焊枪与滑动架固定连接;本发明通过半圆形的固定导轨和活动导轨使得焊枪不用固定在管道上即可绕管道进行焊接,相对于现有技术,本发明取消了野外管道焊接过程中的固定和拆卸过

一种管道焊接机器人.pdf
本发明提供一种管道焊接机器人,包括电缸、车身、转台、机械臂、摄像头、控制箱、履带装置等,其特征在于:所述的履带装置由履带、和两个履带轮组成,电机连接在连板上,电机轴与一履带轮连接驱动其转动,从而使履带装置行走。本发明通过改变履带装置位置使其适应管道行走,通过控制箱控制机器人完成管道焊接。
一种管道焊接机器人.pdf
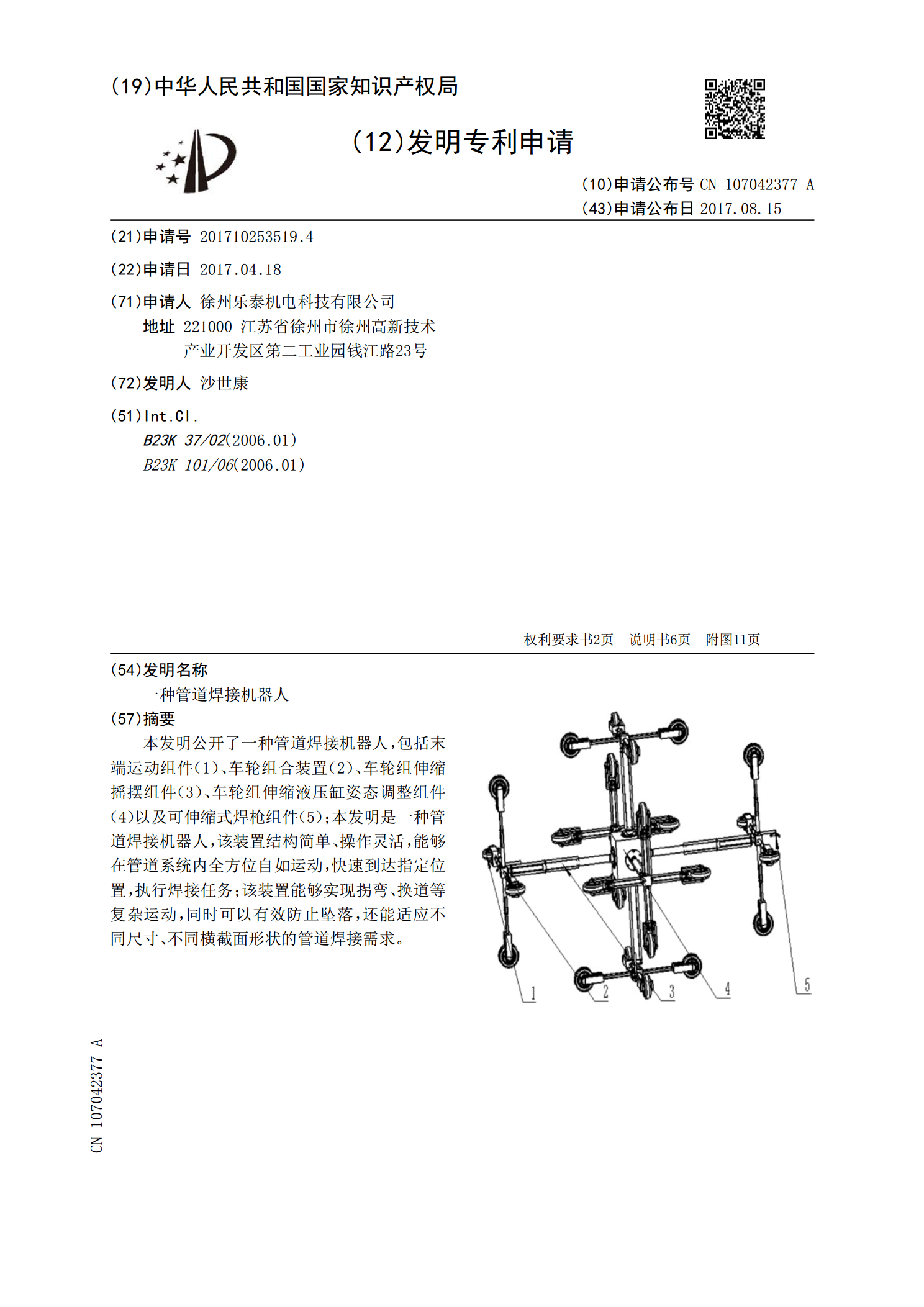
本发明公开了一种管道焊接机器人,包括末端运动组件(1)、车轮组合装置(2)、车轮组伸缩摇摆组件(3)、车轮组伸缩液压缸姿态调整组件(4)以及可伸缩式焊枪组件(5);本发明是一种管道焊接机器人,该装置结构简单、操作灵活,能够在管道系统内全方位自如运动,快速到达指定位置,执行焊接任务;该装置能够实现拐弯、换道等复杂运动,同时可以有效防止坠落,还能适应不同尺寸、不同横截面形状的管道焊接需求。