
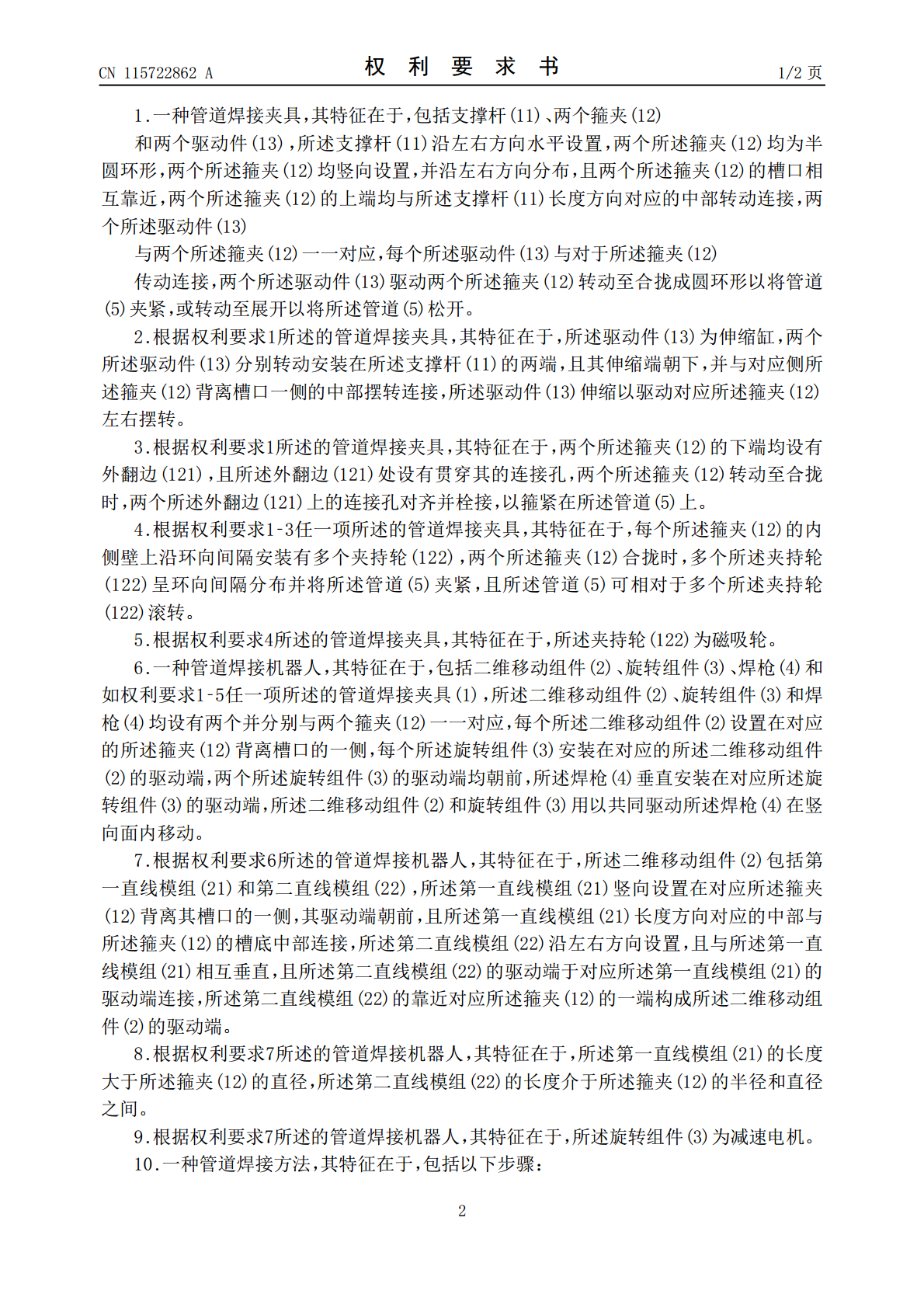
一种管道焊接夹具、管道焊接机器人及管道焊接方法.pdf

是你****噩呀

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道焊接夹具、管道焊接机器人及管道焊接方法.pdf
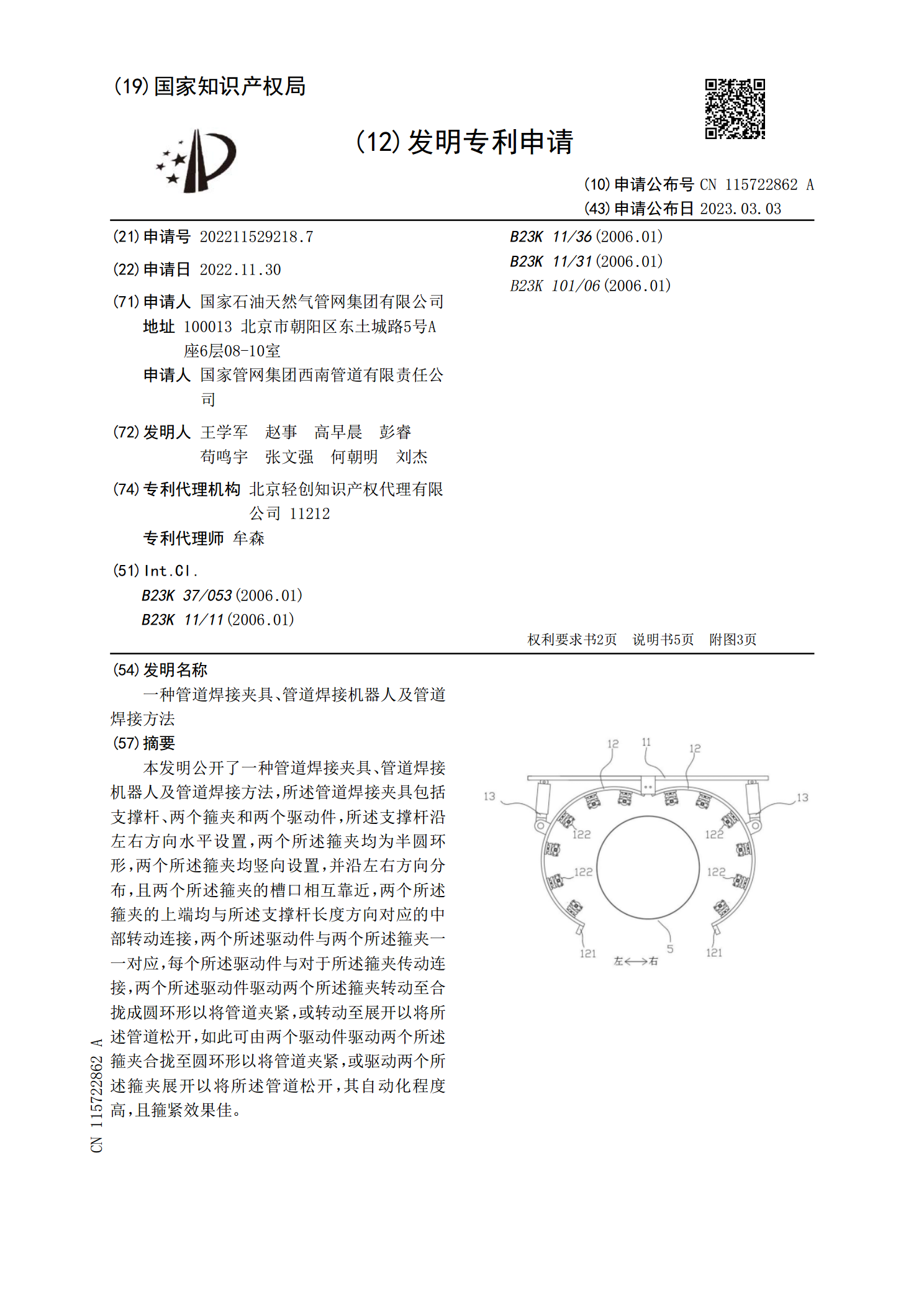
本发明公开了一种管道焊接夹具、管道焊接机器人及管道焊接方法,所述管道焊接夹具包括支撑杆、两个箍夹和两个驱动件,所述支撑杆沿左右方向水平设置,两个所述箍夹均为半圆环形,两个所述箍夹均竖向设置,并沿左右方向分布,且两个所述箍夹的槽口相互靠近,两个所述箍夹的上端均与所述支撑杆长度方向对应的中部转动连接,两个所述驱动件与两个所述箍夹一一对应,每个所述驱动件与对于所述箍夹传动连接,两个所述驱动件驱动两个所述箍夹转动至合拢成圆环形以将管道夹紧,或转动至展开以将所述管道松开,如此可由两个驱动件驱动两个所述箍夹合拢至圆环

管道焊接夹具.pdf
本发明涉及一种管道焊接夹具,属于焊接夹具技术领域,包括两个竖直设置的左支撑腿和右支撑腿,左支撑腿和右支撑腿通过连接杆连接在一起,在左支撑腿上安装有左安装板,左安装板为半圆环结构,在右支撑腿上安装有与左安装板对称设置的右安装板,右安装板为半圆环结构,在左安装板与右安装板之间安装有若干个且呈半圆环排列的轴,在轴上安装有若干个滑轮。本设计整体进行管线焊接时非常方便,工人操作起来也不累,而且焊完冷却后可直接进行打磨工作,同时检查起来也很方便,大大提高了焊接效率,同时提高了焊接质量。

一种不规则管道焊接夹具.pdf
本发明新型涉及一种不规则管道焊接夹具,它包括固定底座和通过锁紧螺栓安装在固定底座上的底板,所述的前部设置有与前部管道配合的前部夹紧装置、中部设置有与箱体配合的箱体固定装置、后部设置有与后部管道配合的后部夹紧装置,且箱体的前后端分别与前部水管和后部水管对接;所述的箱体固定装置包括设置在底板上的中部升降架,所述的中部升降架上设置有与箱体下表面配合的箱体安装座和与箱体配合的夹紧装置;本发明采用一个可以调节高度的箱体固定装置,可以调节箱体的高度,使其与管道固定装置上固定的不规则管道进行对接,同时又能留出足够的焊接

压力管道的焊接方法.docx
压力管道的焊接方法压力管道是指所有承受内压或外压的管道,无论其管内介质如何。如下是小编给大家整理的压力管道的焊接方法,希望对大家有所作用。管道检测标准对压力管道的检验检测工作包括:外观检验、测厚、无损检测、硬度测定、金相、耐压试验等。而磁粉检测则是无损检测一种经常使用的方法。磁粉检测的能力不仅与施加磁场强度的大小有关,还与缺陷的方向、缺陷的深宽比、缺陷的形状、工件的外形、尺寸和表面状态及可能产生缺陷的部位有关。因此就有各种不同的磁化方法。管道特点1、压力管道是一个系统,相互关联相互影响,牵一发而动全身。2

压力管道的焊接方法.docx
压力管道的焊接方法压力管道的焊接方法压力管道是指所有承受内压或外压的管道,无论其管内介质如何。如下是小编给大家整理的压力管道的焊接方法,希望对大家有所作用。管道检测标准对压力管道的检验检测工作包括:外观检验、测厚、无损检测、硬度测定、金相、耐压试验等。而磁粉检测则是无损检测一种经常使用的方法。磁粉检测的能力不仅与施加磁场强度的大小有关,还与缺陷的方向、缺陷的深宽比、缺陷的形状、工件的外形、尺寸和表面状态及可能产生缺陷的部位有关。因此就有各种不同的磁化方法。管道特点1、压力管道是一个系统,相互关联相互影响,