
一种小型无人船的自主推进装置及控制方法.pdf

春波****公主


1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种小型无人船的自主推进装置及控制方法.pdf
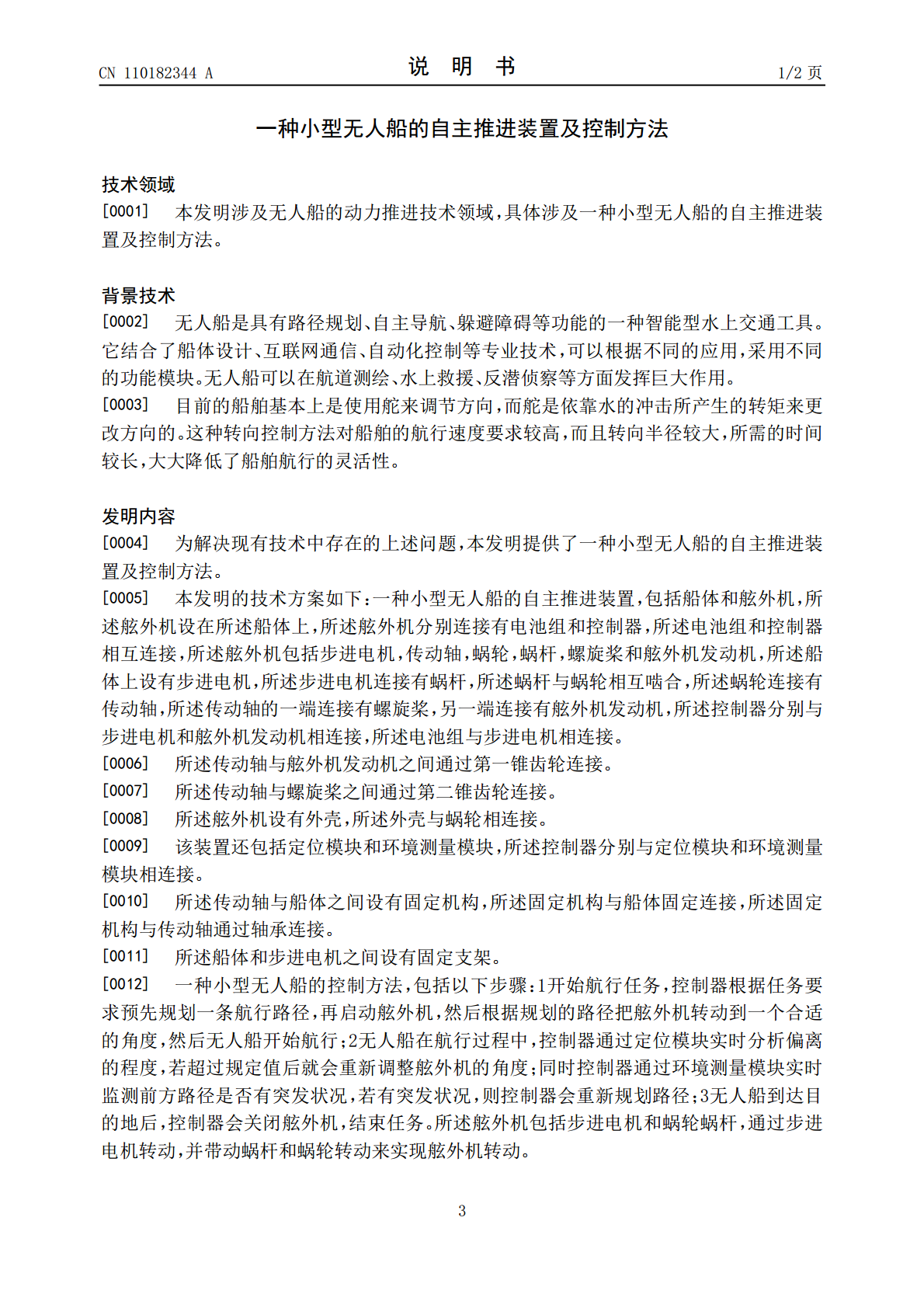
本发明公开了一种小型无人船的自主推进装置及控制方法,包括船体和舷外机,所述舷外机设在所述船体上,其特征在于:所述舷外机分别连接有电池组和控制器,所述电池组和控制器相互连接,所述舷外机包括步进电机,传动轴,蜗轮,蜗杆,螺旋桨和舷外机发动机,所述船体上设有步进电机,所述步进电机连接有蜗杆,所述蜗杆与蜗轮相互啮合,所述蜗轮连接有传动轴,所述传动轴的一端连接有螺旋桨,另一端连接有舷外机发动机。本发明利用蜗轮蜗杆传动把步进电动机输出的转矩传递给舷外机,使其转动一定的角度,具体转动的角度大小和方向靠控制器输出电脉冲信

一种小型无人船风力推进装置.pdf
本发明提供一种小型无人船风力推进装置,包括立柱、设置在立柱上端的支撑壳、设置在支撑壳内的风力叶片主轴、设置在风力叶片主轴上的风力叶片、设置在立柱内的竖直传动轴,立柱与支撑壳之间设置有轴承,风力叶片主轴上安装有锥齿轮一,传动轴的上端伸入至支撑壳内且设置有与锥齿轮一啮合的锥齿轮二,竖直传动轴的下端伸入至小型无人船内且下端安装有中间齿轮,小型无人船内还设置有两个水平传动轴,每个水平传动轴的两端分别安装有传递齿轮一和传递齿轮二,两个传递齿轮一均与中间齿轮啮合,两个传递齿轮二分别与对应的传递齿轮三啮合,且两个传递齿

一种无人船推进装置.pdf
本发明公开了一种无人船推进装置,包括小船主体、定位凹槽、角铁、螺栓、第一连杆、安装板、支撑杆、桨叶、连接块、套筒、电磁阀、第一弹簧、空腔、限位板、固定轴、蓄电池、底板、垫块、安装螺母、定位销、固定螺母、螺母块、把手、第二弹簧、固定臂、固定座和电机,该发明通过桨叶的划动代替传统的轴系和螺旋桨结构来推进小船主体,避免了渔网缠绕和撞击造成和推进结构损坏的情况发生,有利于保证推进装置在恶劣环境下稳定运行,通过第二弹簧对安装螺母的压合以及定位销的插接固定,避免了安装螺母的松动和脱落的情况发生,有利于装置的固定安装,
一种无人船自主加油装置.pdf
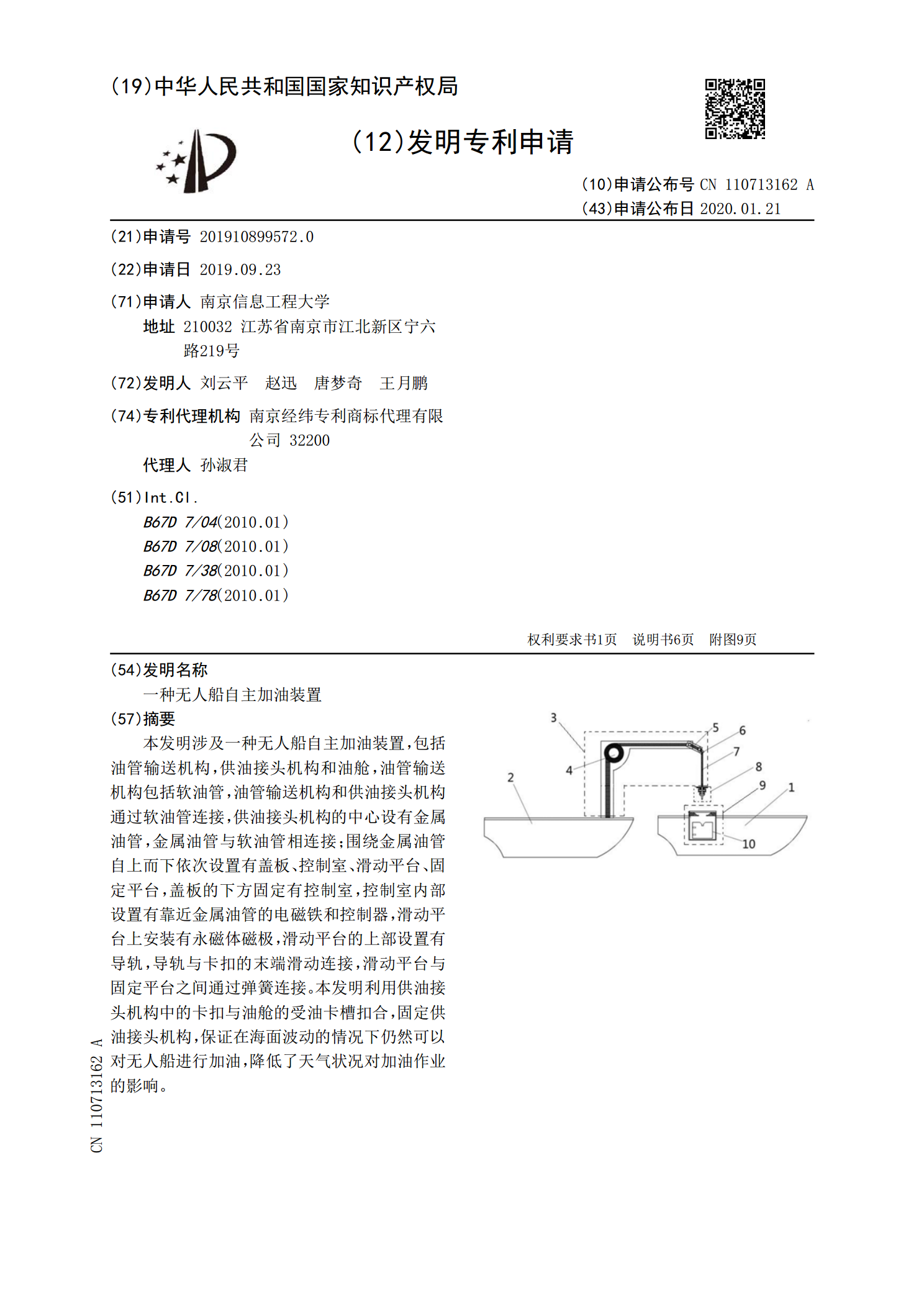
本发明涉及一种无人船自主加油装置,包括油管输送机构,供油接头机构和油舱,油管输送机构包括软油管,油管输送机构和供油接头机构通过软油管连接,供油接头机构的中心设有金属油管,金属油管与软油管相连接;围绕金属油管自上而下依次设置有盖板、控制室、滑动平台、固定平台,盖板的下方固定有控制室,控制室内部设置有靠近金属油管的电磁铁和控制器,滑动平台上安装有永磁体磁极,滑动平台的上部设置有导轨,导轨与卡扣的末端滑动连接,滑动平台与固定平台之间通过弹簧连接。本发明利用供油接头机构中的卡扣与油舱的受油卡槽扣合,固定供油接头机

一种自主无人船.pdf
本发明属于无人船领域,并公开了一种自主无人船,包括上位机、岸基无线模块、船体、微控制器、船载无线模块、GPS传感器、姿态传感器、舵机、电机驱动板和电机,上位机与岸基无线模块连接;微控制器与船载无线模块连接;微控制器上连接GPS传感器、姿态传感器、舵机和电机驱动板;电机与螺旋桨连接,舵机与舵叶连接;微控制器接收来自GPS传感器的数据以获得经纬度信息,且接收来自姿态传感器的数据以获得航向角信息,以实现船体的自主航行。本无人船航行时,船载运动控制系统可根据航行状态信息实时调节航向角和电机转速,降低延时,同时可通