
一种双机械臂协同装配作业路径规划方法.pdf

一吃****天材

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双机械臂协同装配作业路径规划方法.pdf
一种双机械臂协同装配作业路径规划方法,建立双机械臂作业的运动学模型与动力学模型;设定初始参数,进行初始采样,计算树节点距离采样点的距离,找到最近的树节点作为父节点;如果不发生碰撞则加入候选采样点;计算采样点的势能,根据势能的倒数进行轮盘赌选择得到采样点;将代价小于r的点加入重连接点中,计算采样点与各重连接点连接而组成的路径的代价,选择最短代价的连接方式确定采样点的连接父节点;选择代价最低的连接方式重新确立节点的父子关系;当采样点与目标点的势能差小于h时用目标点替换采样点,完成随机树;根据随机树的节点父子关

一种机械臂拼接路径规划方法及装置.pdf
本申请公开了一种机械臂路径规划的方法及计算机设备,该方法包括:确定机械臂起始点参数和目标点参数,根据所述起始点参数和所述目标点参数基于A*算法从预设轨迹库中搜索出机械臂从起始点运动到目标点的多个第一路径,其中,第一路径是指从起始点运动到目标点过程中任意相邻两节点之间的路径;根据预设的拼接算法依次将所述第一路径进行有序拼接得到机械臂从起始点运动到目标点所对应的初始路径,验证所述初始路径是否满足碰撞检测;若不满足,则调整所述初始路径得到调整后的路径,将调整后的路径作为机械臂的路径,其中,调整后的路径满足碰撞检

一种分区域农机协同作业路径规划方法.pdf
本发明公开了一种分区域农机协同作业路径规划方法,其包括以下步骤:建立分区域农田模型;输入农机的最小转弯半径,在分区域农田模型的基础上,建立农机协同作业路径规划模型;利用模拟退火算法求解农机协同作业路径规划模型;输出各台农机的作业路径;本发明能降低转弯路径总长度和时间,提高作业效率。
一种基于改进RRT算法的机械臂路径规划方法.pdf
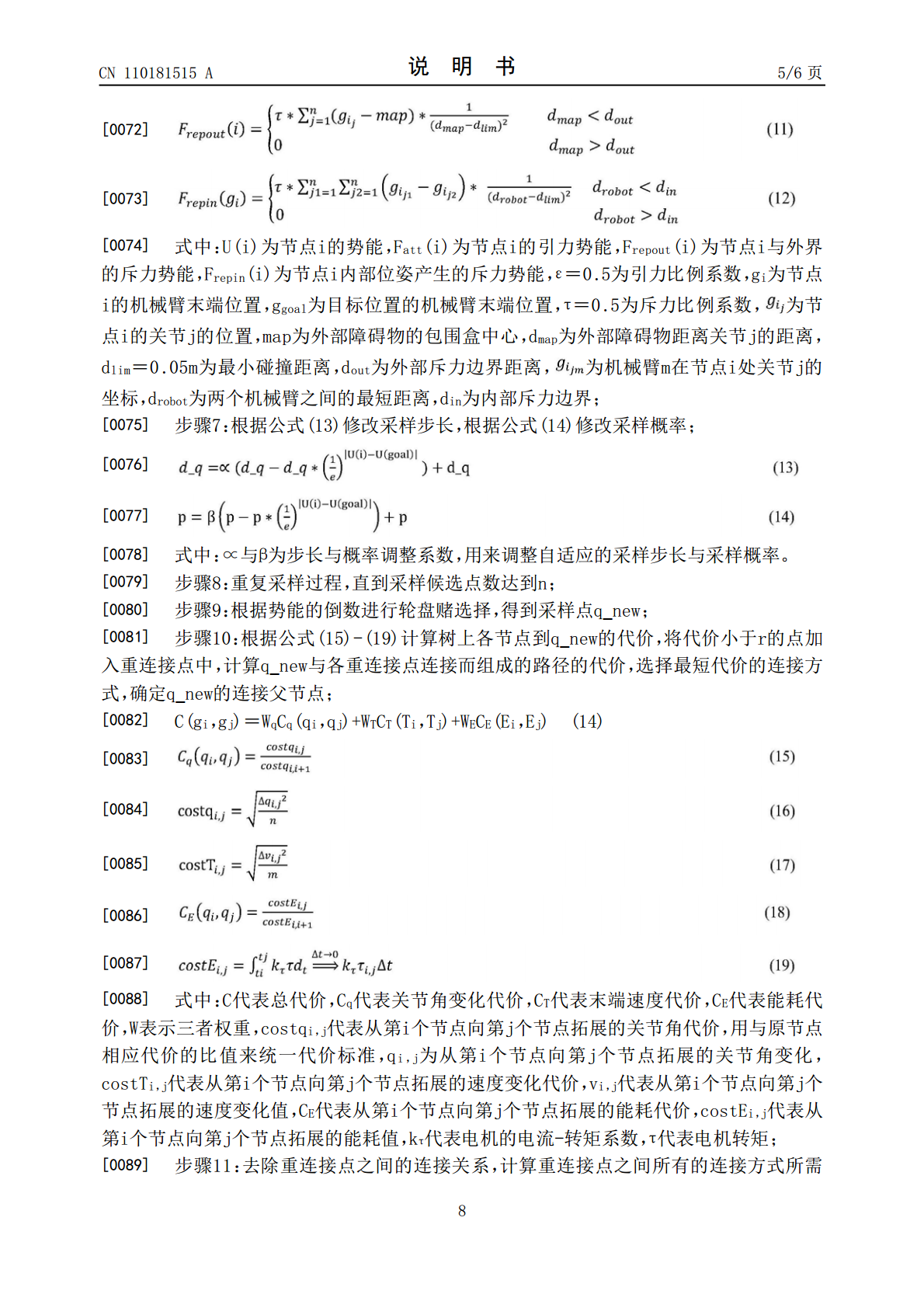
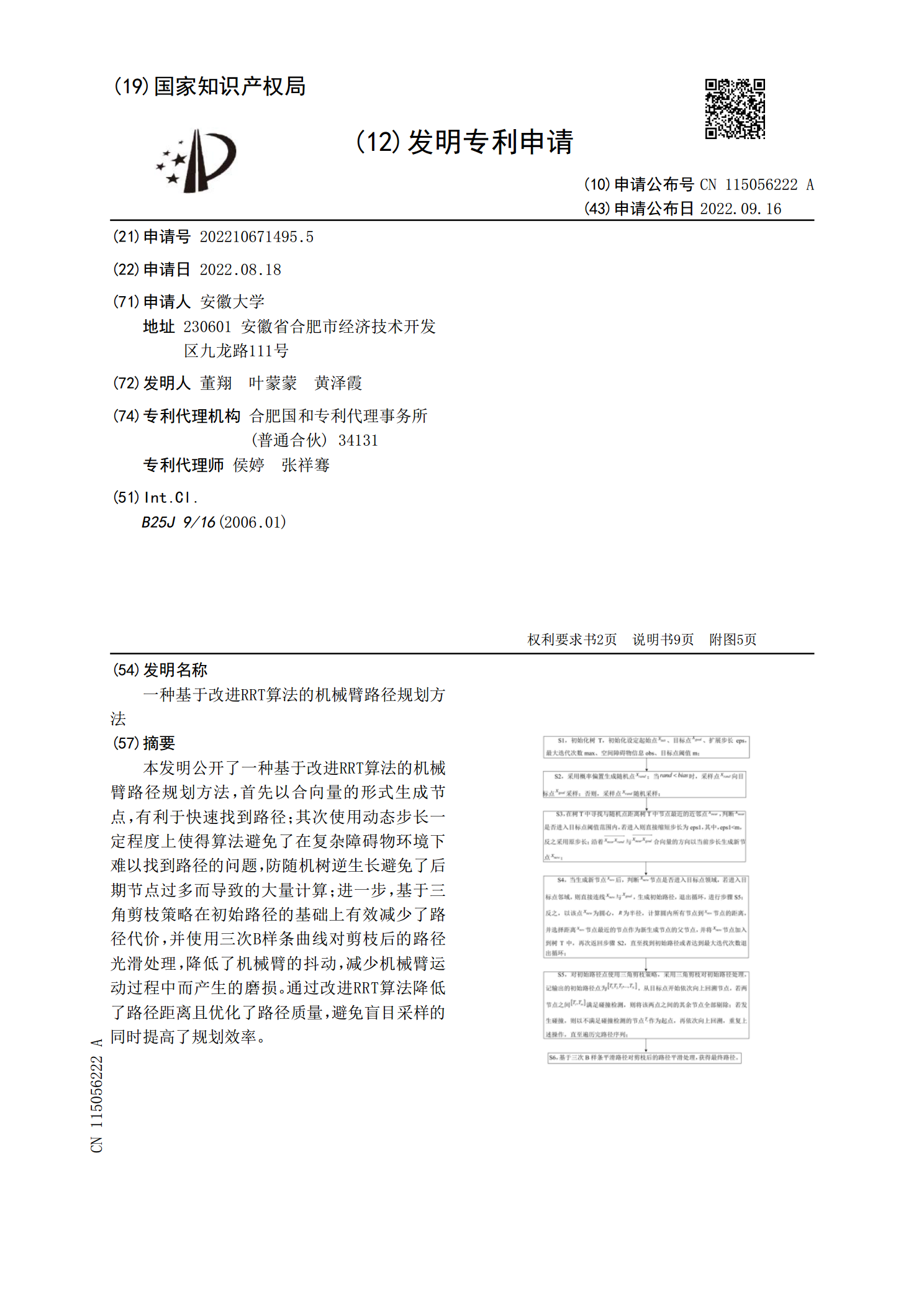
本发明公开了一种基于改进RRT算法的机械臂路径规划方法,首先以合向量的形式生成节点,有利于快速找到路径;其次使用动态步长一定程度上使得算法避免了在复杂障碍物环境下难以找到路径的问题,防随机树逆生长避免了后期节点过多而导致的大量计算;进一步,基于三角剪枝策略在初始路径的基础上有效减少了路径代价,并使用三次B样条曲线对剪枝后的路径光滑处理,降低了机械臂的抖动,减少机械臂运动过程中而产生的磨损。通过改进RRT算法降低了路径距离且优化了路径质量,避免盲目采样的同时提高了规划效率。

空间冗余机械臂路径规划方法研究.docx
空间冗余机械臂路径规划方法研究空间冗余机械臂路径规划方法研究摘要:机器人路径规划一直是机器人领域的核心问题之一。在空间冗余机械臂中,路径规划更加复杂,因为机械臂具有多余的自由度,表现出了更多可能的运动策略。本文以空间冗余机械臂路径规划为研究对象,综述了相关的路径规划方法,并介绍了近年来一些新的算法和技术。通过比较这些方法的优缺点,讨论了未来的研究方向和挑战。关键词:机械臂,路径规划,冗余度,空间冗余,算法,技术1.引言机械臂是一种广泛应用于工业、医疗和服务领域的机器人。路径规划是机械臂控制中的重要问题,它