
一种基于改进RRT算法的机械臂路径规划方法.pdf

Ja****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进RRT算法的机械臂路径规划方法.pdf
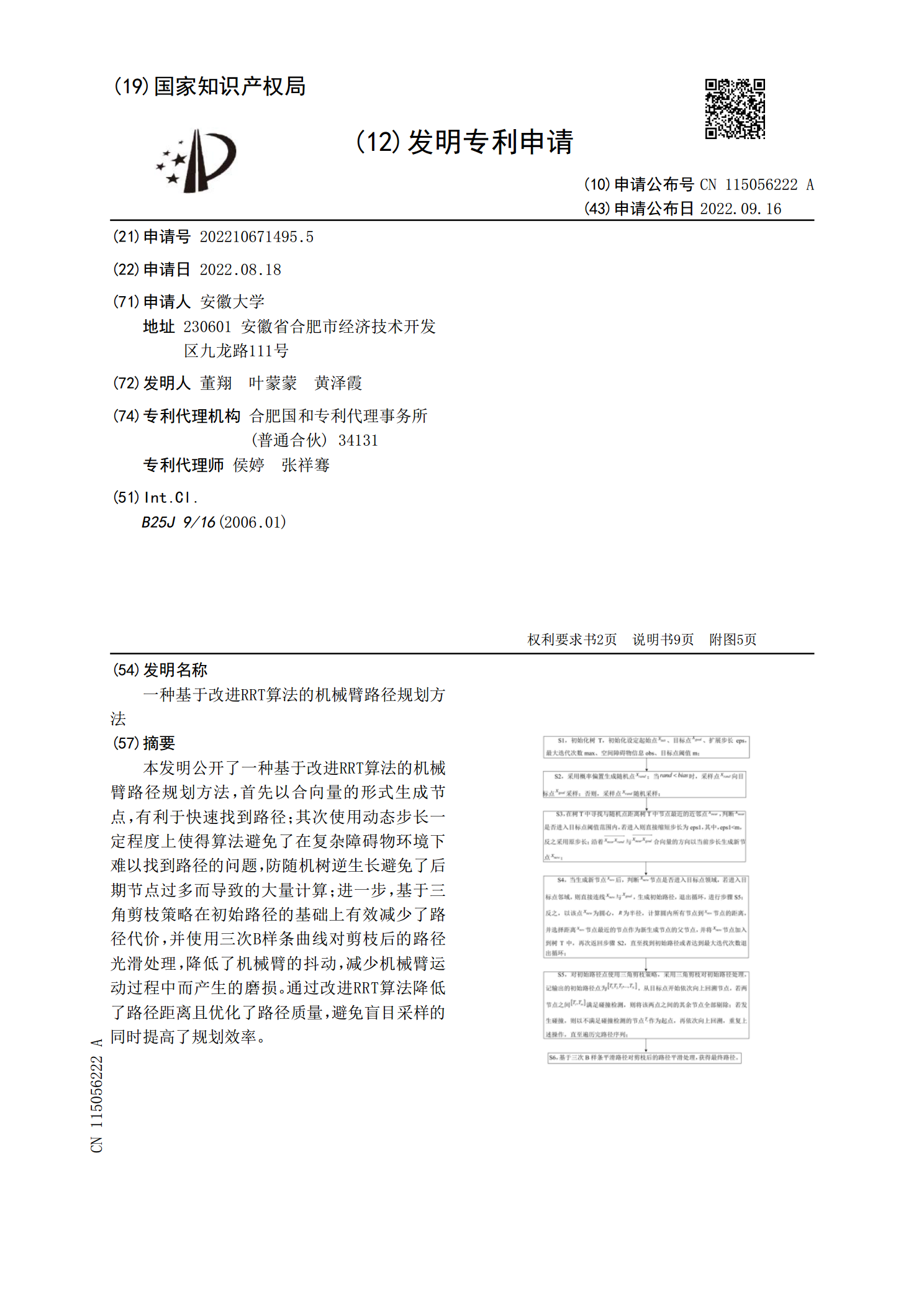
本发明公开了一种基于改进RRT算法的机械臂路径规划方法,首先以合向量的形式生成节点,有利于快速找到路径;其次使用动态步长一定程度上使得算法避免了在复杂障碍物环境下难以找到路径的问题,防随机树逆生长避免了后期节点过多而导致的大量计算;进一步,基于三角剪枝策略在初始路径的基础上有效减少了路径代价,并使用三次B样条曲线对剪枝后的路径光滑处理,降低了机械臂的抖动,减少机械臂运动过程中而产生的磨损。通过改进RRT算法降低了路径距离且优化了路径质量,避免盲目采样的同时提高了规划效率。

基于改进RRT算法的机械臂路径规划研究.docx
基于改进RRT算法的机械臂路径规划研究基于改进RRT算法的机械臂路径规划研究摘要:路径规划是机械臂中一项关键性的任务,它决定了机械臂在三维空间内的轨迹。为了实现高效、快速的路径规划,本文提出了一种基于改进RRT算法的机械臂路径规划方法。首先,介绍了机械臂路径规划的背景和算法原理,然后详细论述了改进RRT算法的设计思路及其优势,最后通过实验验证了该算法在机械臂路径规划中的有效性和高效性。关键词:路径规划、机械臂、RRT算法、改进算法1.引言机械臂(roboticarm)是一种自动化设备,具有高速度、高精度和
基于改进RRT算法的移动机械臂路径规划.pptx
汇报人:CONTENTS添加章节标题RRT算法简介RRT算法的基本原理RRT算法的应用领域RRT算法的优缺点改进RRT算法的提出改进RRT算法的背景和意义改进RRT算法的目标和实现方式改进RRT算法的优势和局限性改进RRT算法的实现过程改进RRT算法的数学模型改进RRT算法的算法流程改进RRT算法的关键技术实现移动机械臂路径规划的应用移动机械臂路径规划的概述移动机械臂路径规划的实现方法移动机械臂路径规划的优缺点和适用场景改进RRT算法在移动机械臂路径规划中的应用效果实验环境和实验方法介绍实验结果分析和比较

改进RRT算法的机械臂路径规划研究.docx
改进RRT算法的机械臂路径规划研究一、引言机械臂作为工业机器人的重要组成部分,已经被广泛应用于生产制造领域。机械臂的运动控制需要经过复杂的路径规划和轨迹设计,以达到高效、精确的生产效果。因此,机械臂路径规划一直是工业机器人技术中一个十分重要的领域。目前,机械臂路径规划领域的研究主要集中在离线路径规划和在线路径规划两个方面,其中离线路径规划主要依赖于前期的地图构建和环境建模,而在线路径规划则在机械臂运动过程中实时规划路径以应对环境变化。对于在线路径规划而言,可靠、高效的路径规划算法是十分必要的,而本文将重点

基于GB_RRT算法的机械臂路径规划.pptx
基于GB_RRT算法的机械臂路径规划目录添加章节标题GB_RRT算法概述定义与原理算法流程算法特点机械臂路径规划问题机械臂路径规划需求传统路径规划算法的局限性GB_RRT算法在机械臂路径规划中的应用优势GB_RRT算法实现过程起点和目标点设定随机种子点生成构建扩展图路径搜索与优化路径平滑处理算法性能评估评估指标实验环境与数据集实验结果与分析与其他算法的比较实际应用案例应用场景描述案例分析过程案例实施效果案例总结与展望结论与展望GB_RRT算法在机械臂路径规划中的贡献未来研究方向与挑战THANKYOU