
矿用无人巡检机器人.pdf

睿达****的的

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

矿用无人巡检机器人.pdf
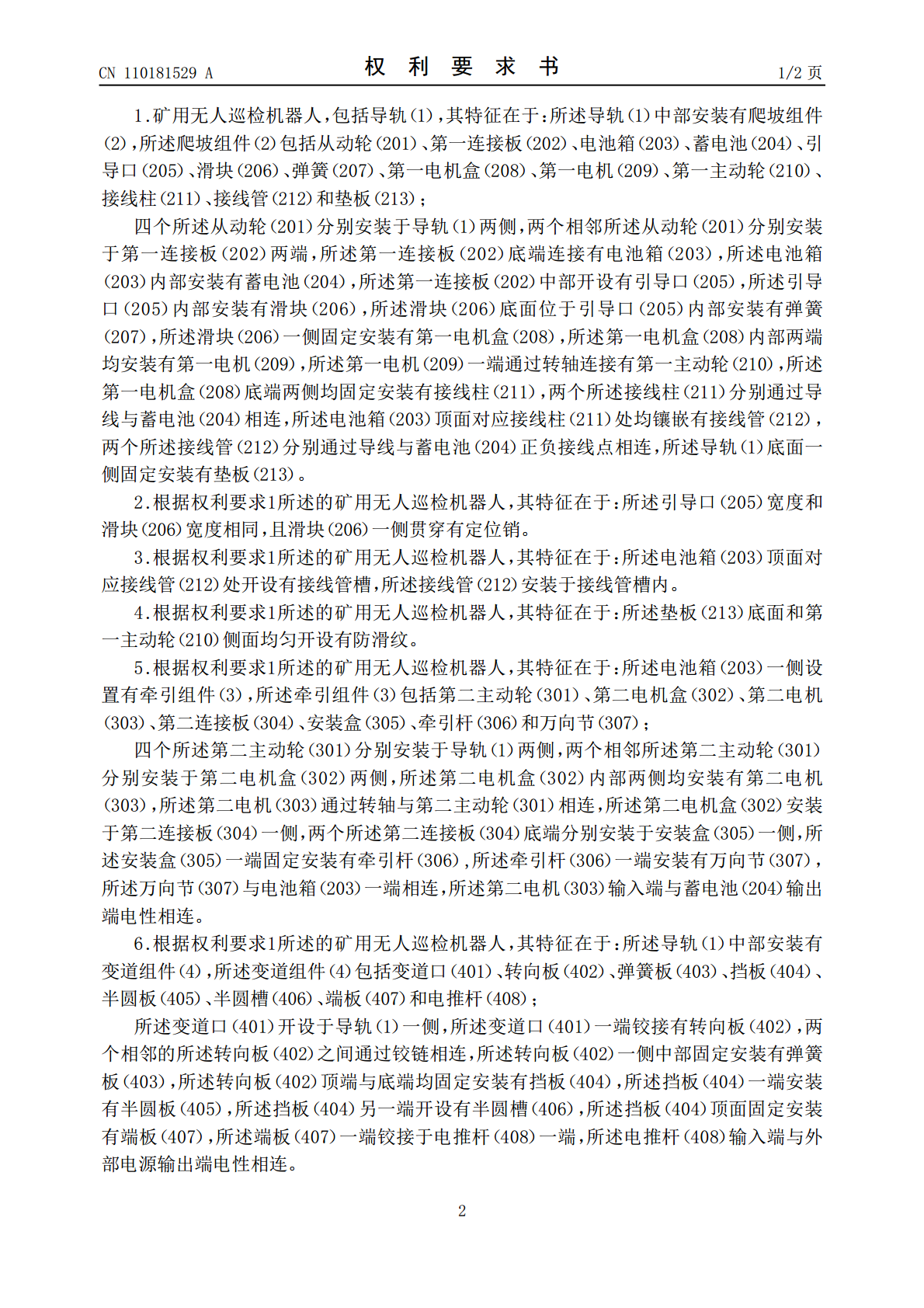
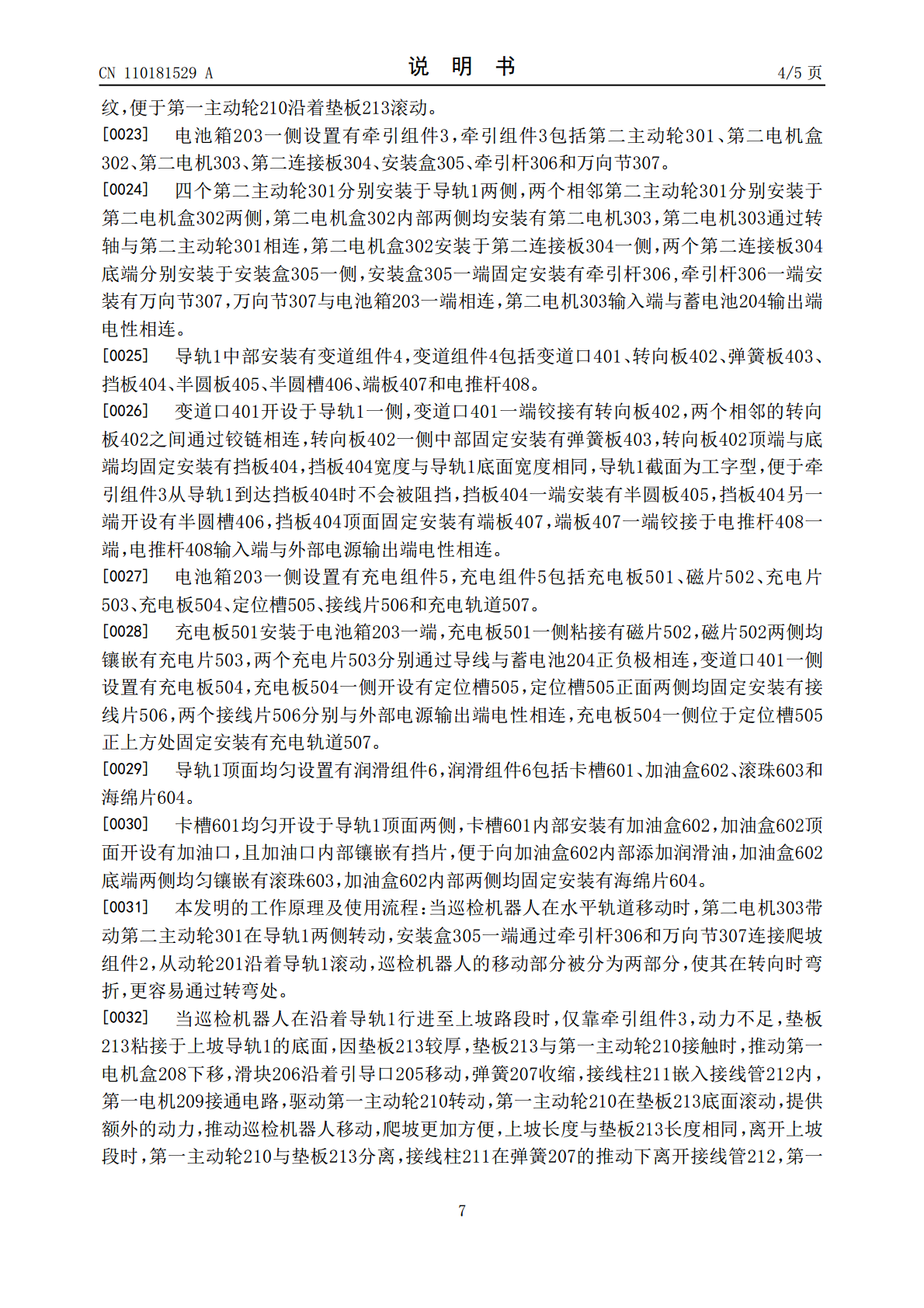
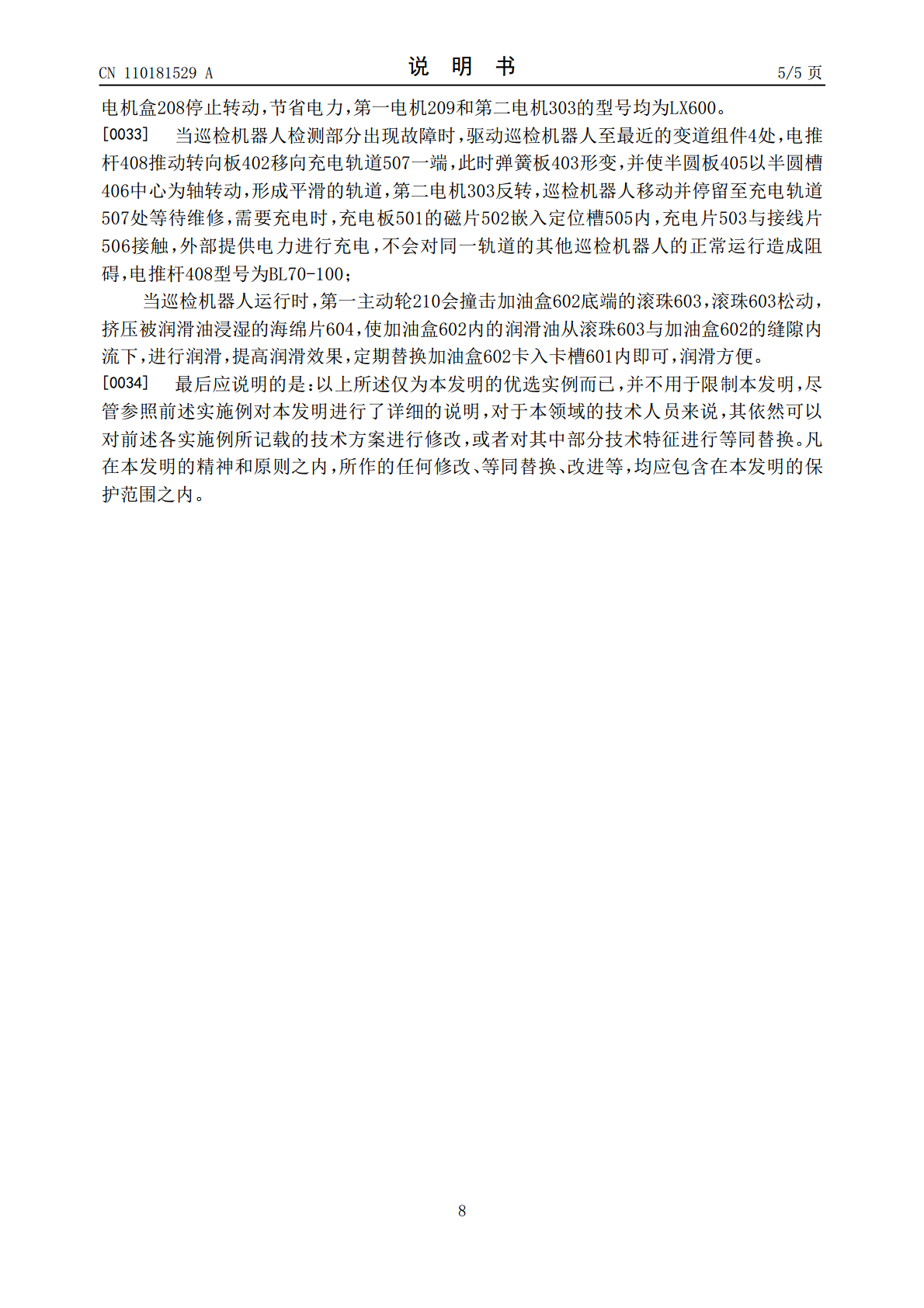
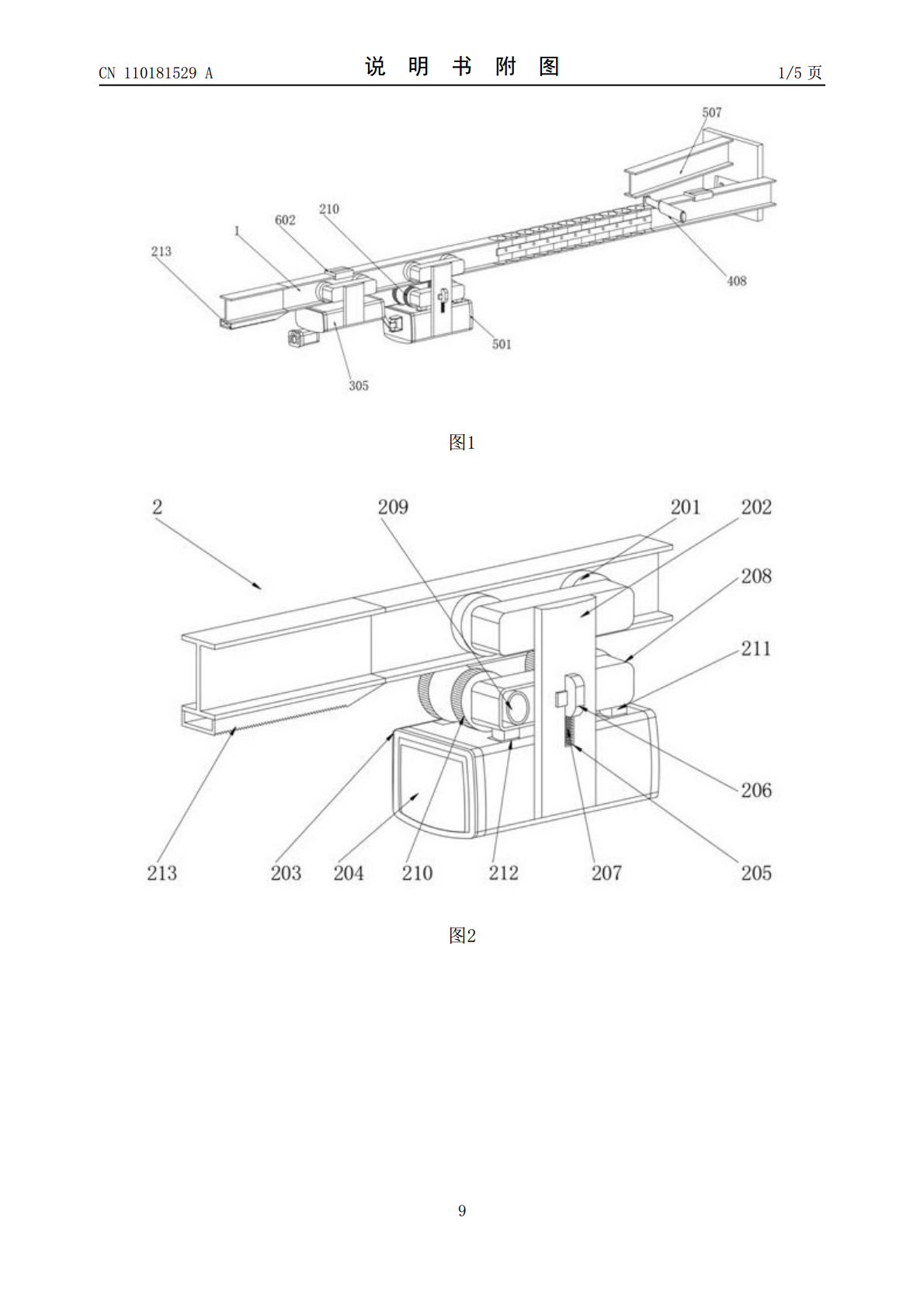
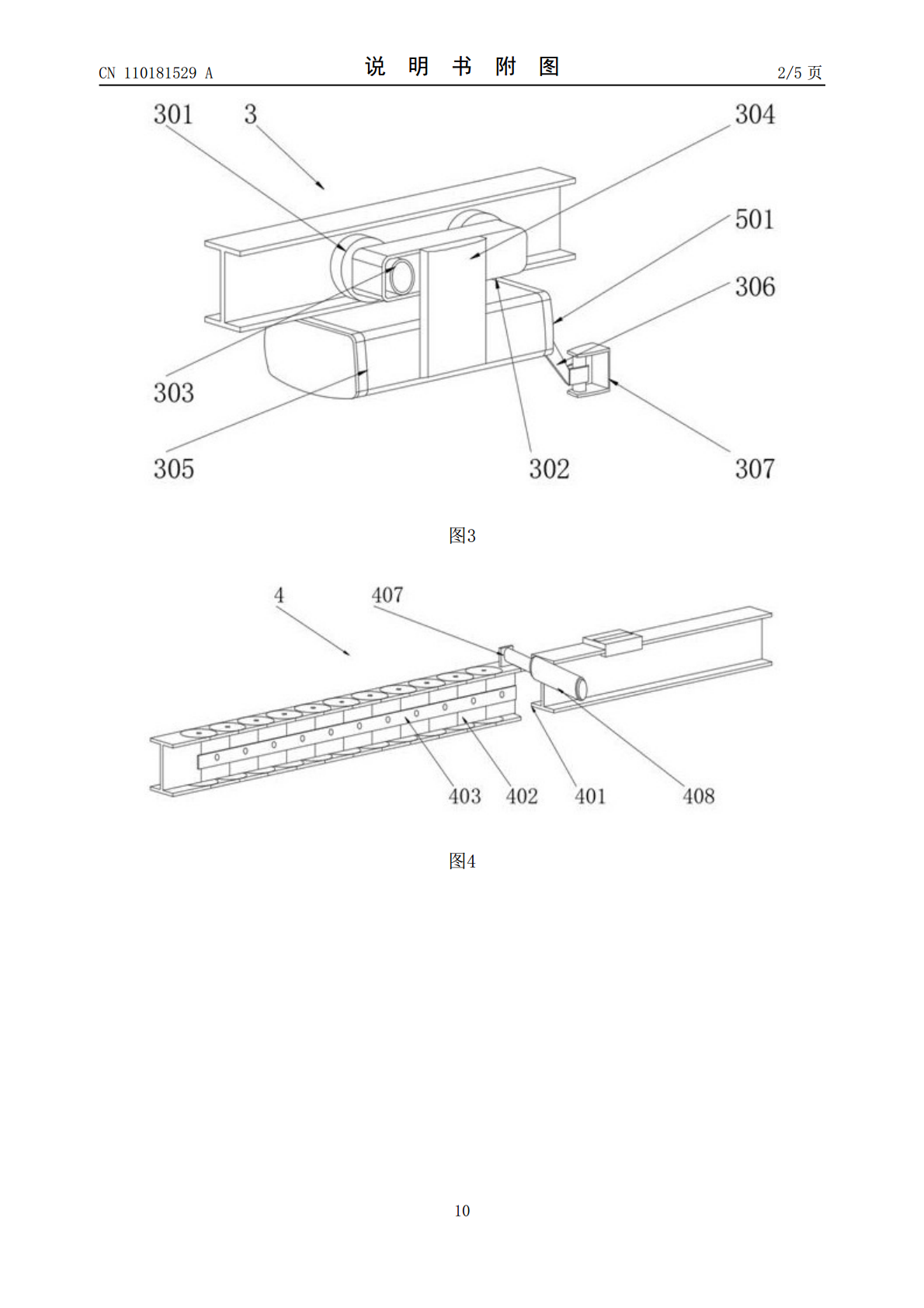
本发明公开了矿用无人巡检机器人,导轨中部安装有爬坡组件,第一连接板底端连接有电池箱,引导口内部安装有滑块,第一电机一端通过转轴连接有第一主动轮,电池箱一侧设置有牵引组件,导轨中部安装有变道组件,转向板一侧中部固定安装有弹簧板,电池箱一侧设置有充电组件,充电板一侧位于定位槽正上方处固定安装有充电轨道,本发明的巡检机器人在沿着导轨行进至上坡路段时,垫板与第一主动轮接触,接线柱嵌入接线管内,提供额外的动力,推动巡检机器人移动,爬坡更加方便,当巡检机器人检测部分出现故障时,电推杆推动转向板移向充电轨道,让巡检机器
矿用巡检机器人自主定位技术研究.pptx
汇报人:/目录0102矿用巡检机器人的应用场景自主定位技术的定义与重要性自主定位技术的发展历程03自主定位技术的分类惯性导航系统原理卫星导航系统原理组合导航系统原理04硬件实现方法软件实现方法数据处理与误差修正方法定位精度与可靠性评估方法05案例一:某矿区巡检机器人应用情况案例二:某矿业公司巡检机器人技术改造案例三:某研究院巡检机器人研究成果转化案例四:自主定位技术在其他领域的应用拓展06技术挑战及解决方案产业发展瓶颈及突破方向未来发展趋势与展望汇报人:

一种无人值守巡检机器人.pdf
本发明涉及一种巡检机器人,特别涉及一种无人值守巡检机器人。其结构包括巡检机器人移动机和巡检区域充电桩,巡检机器人移动机包括机身,所述的机身底部设置移动轮,所述的移动轮通过机身内的电动机控制,所述的电动机分别连接机身内设置的锂电池和控制器,所述的机身上方还设置有信息采集装置,所述的控制器连接有无线信号传递装置和充电器控制器,所述的充电器控制器包括一个蓝牙扫描匹配电路;所述的巡检区域充电桩内设置有与所述蓝牙扫描匹配电路匹配的蓝牙信号发射电路。本发明的一种无人值守巡检机器人,其能够利用巡检区域设置的充电桩为巡检
矿用带式输送机巡检机器人研究与设计.pptx
矿用带式输送机巡检机器人研究与设计目录添加章节标题矿用带式输送机巡检机器人的研究背景矿用带式输送机巡检的重要性传统巡检方式的局限性机器人技术的引入与优势矿用带式输送机巡检机器人的设计机器人结构设计传感器系统设计控制系统设计通信系统设计矿用带式输送机巡检机器人的关键技术运动控制技术导航定位技术障碍物识别与避障技术数据处理与分析技术矿用带式输送机巡检机器人的应用与测试实际应用场景与效果测试环境与测试方法测试结果与分析性能评估与优化建议矿用带式输送机巡检机器人的发展前景与挑战市场需求与发展趋势技术创新与研究方向

矿用智能巡检机器人无标定视觉伺服控制研究.pptx
添加副标题目录PART01矿用智能巡检机器人的应用背景矿用智能巡检机器人的功能特点矿用智能巡检机器人的技术要求PART02视觉伺服控制技术简介无标定视觉伺服控制技术的优势无标定视觉伺服控制技术的实现方法PART03系统总体架构设计视觉模块设计伺服控制模块设计通信模块设计PART04实验场景与实验设备实验过程与实验结果结果分析性能评估PART05研究结论研究不足与展望感谢您的观看