
矿用巡检机器人自主定位技术研究.pptx

快乐****蜜蜂


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
矿用巡检机器人自主定位技术研究.pptx
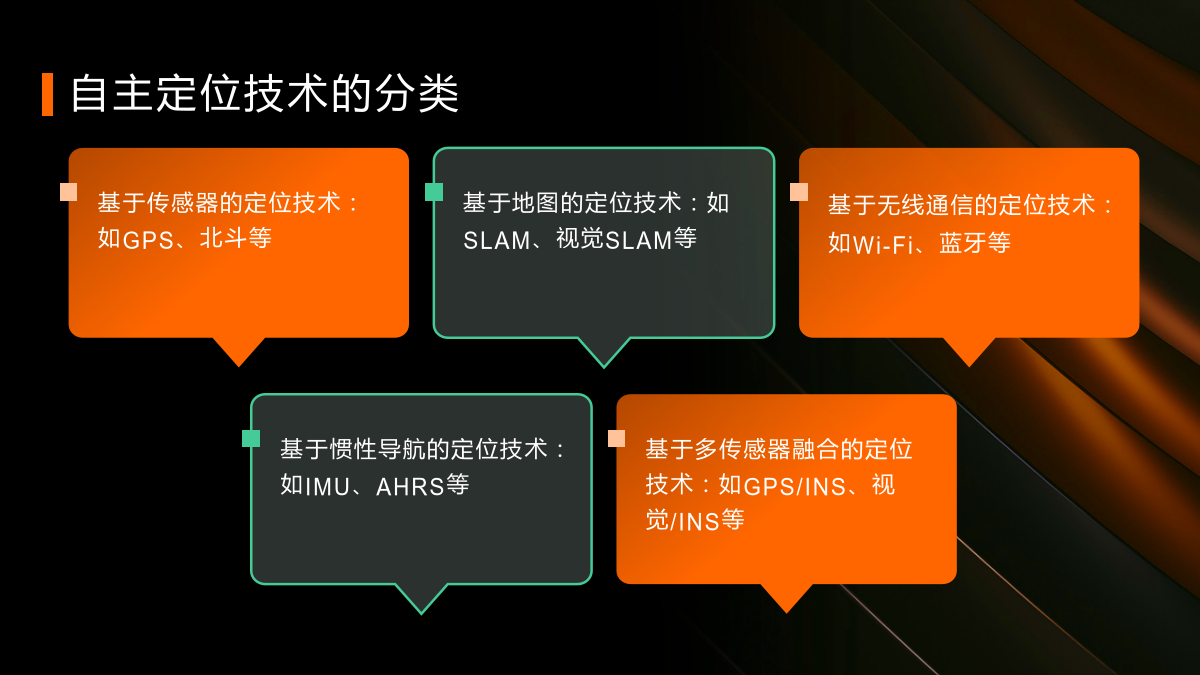
汇报人:/目录0102矿用巡检机器人的应用场景自主定位技术的定义与重要性自主定位技术的发展历程03自主定位技术的分类惯性导航系统原理卫星导航系统原理组合导航系统原理04硬件实现方法软件实现方法数据处理与误差修正方法定位精度与可靠性评估方法05案例一:某矿区巡检机器人应用情况案例二:某矿业公司巡检机器人技术改造案例三:某研究院巡检机器人研究成果转化案例四:自主定位技术在其他领域的应用拓展06技术挑战及解决方案产业发展瓶颈及突破方向未来发展趋势与展望汇报人:

矿用无人巡检机器人.pdf
本发明公开了矿用无人巡检机器人,导轨中部安装有爬坡组件,第一连接板底端连接有电池箱,引导口内部安装有滑块,第一电机一端通过转轴连接有第一主动轮,电池箱一侧设置有牵引组件,导轨中部安装有变道组件,转向板一侧中部固定安装有弹簧板,电池箱一侧设置有充电组件,充电板一侧位于定位槽正上方处固定安装有充电轨道,本发明的巡检机器人在沿着导轨行进至上坡路段时,垫板与第一主动轮接触,接线柱嵌入接线管内,提供额外的动力,推动巡检机器人移动,爬坡更加方便,当巡检机器人检测部分出现故障时,电推杆推动转向板移向充电轨道,让巡检机器

地铁智能巡检车高精度自主定位技术研究.docx
地铁智能巡检车高精度自主定位技术研究地铁智能巡检车高精度自主定位技术研究摘要:随着城市地铁的快速发展,地铁智能巡检车成为了地铁运营维护的重要组成部分。本论文针对地铁智能巡检车的高精度自主定位技术进行了研究。首先,介绍了地铁智能巡检车的背景与研究意义,然后分析了地铁巡检车的定位需求,进而探讨了高精度自主定位技术的优势和挑战。接下来,本文详细介绍了高精度自主定位技术的相关方法,包括基于惯性导航系统(INS)的定位、基于全球定位系统(GPS)的定位、基于视觉的定位以及基于激光雷达的定位。最后,本文总结了以上各种

巡检机器人定位与路径规划技术研究的开题报告.docx
巡检机器人定位与路径规划技术研究的开题报告一、选题背景和意义目前,在各领域中,机器人技术的应用越来越广泛。尤其对于需要长时间巡检的场所,如电厂、核电站、隧道、桥梁等,使用机器人进行巡检,可以提高效率,并且减少安全隐患。然而,如何实现机器人的精准定位和路径规划,是机器人巡检技术研究的重要方向。因此,本研究选题为“巡检机器人定位与路径规划技术研究”。二、研究现状及分析目前,机器人定位的常用方法有GPS定位、惯性导航、视觉定位等。其中,GPS定位在露天环境、无遮挡情况下定位效果较好,但在室内、植被覆盖茂密等场景

变电站巡检机器人定位导航技术研究.docx
变电站巡检机器人定位导航技术研究标题:变电站巡检机器人定位导航技术研究摘要:随着科技的不断进步,人们对于自动化和智能化设备的需求也越来越高,尤其在工业环境下,如变电站巡检,人工巡检存在一定的局限性和危险性,因此研究变电站巡检机器人的定位导航技术具有重要意义。本文着重探讨了变电站巡检机器人的定位导航技术,包括传感器选择、定位算法、机器人路径规划等方面,并提出了一种基于视觉与激光融合的定位导航方法,提高了机器人的定位和导航精度,为变电站巡检机器人的应用提供了有效的技术支持。1.引言为了保障电力系统的稳定运行和