
一种路径跟踪控制方法及设备.pdf

曦晨****22

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种路径跟踪控制方法及设备.pdf
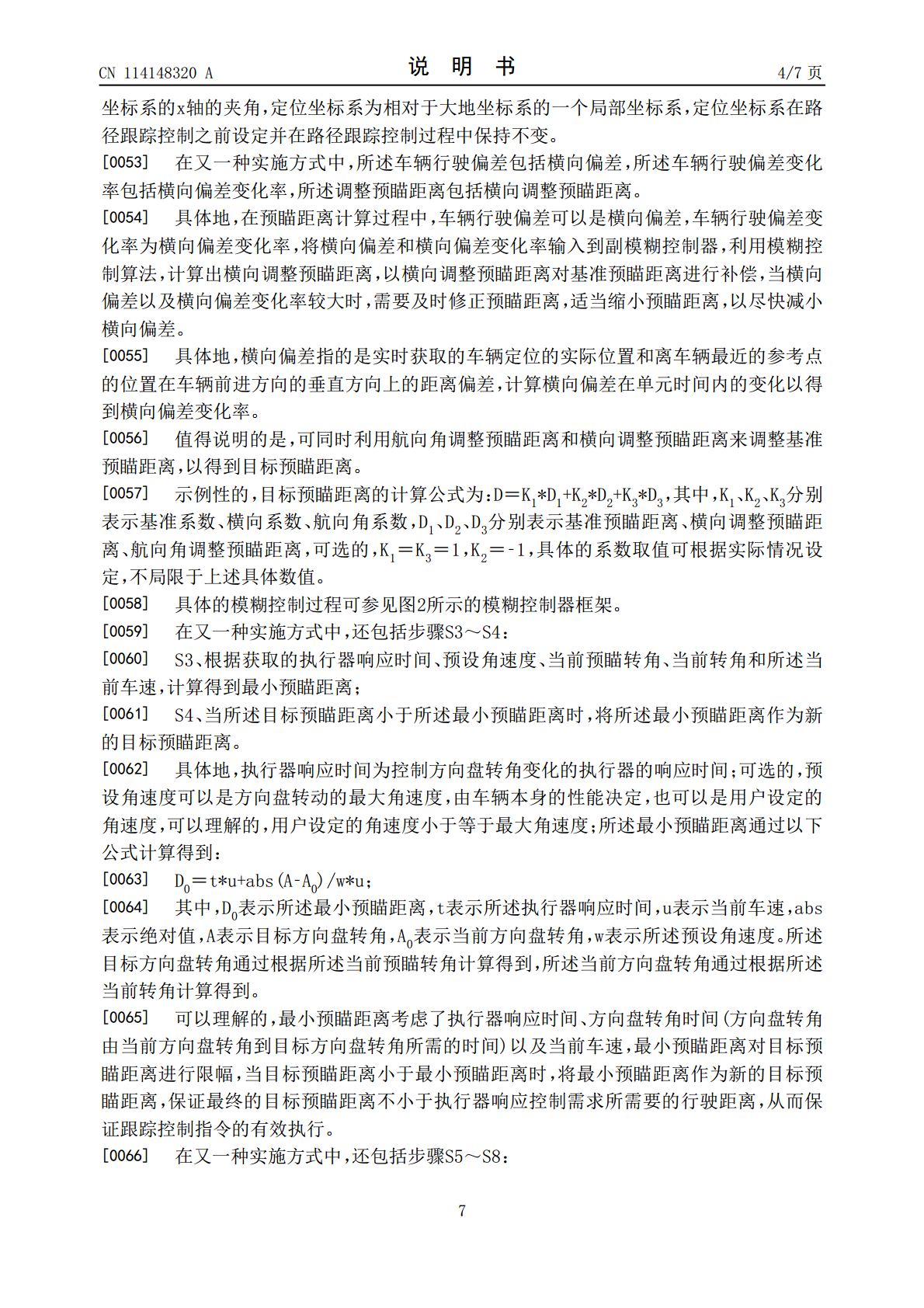
本发明公开一种路径跟踪控制方法,包括:基于模糊控制算法,通过根据获取当前车速和当前路径曲率来计算基准预瞄距离,通过根据获取到的车辆行驶偏差和车辆行驶偏差变化率来计算得到调整预瞄距离,进而根据调整预瞄距离对基准预瞄距离进行补偿计算,以得到目标预瞄距离。本发明还公开一种路径跟踪控制设备。本发明实施例考虑了车辆行驶偏差,以对预瞄距离进行实时的调整补偿,以适应实际行驶过程中不断变化的外部环境约束,适用于算力有限的量产实车控制器,并提高了路径跟踪控制精度。
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf
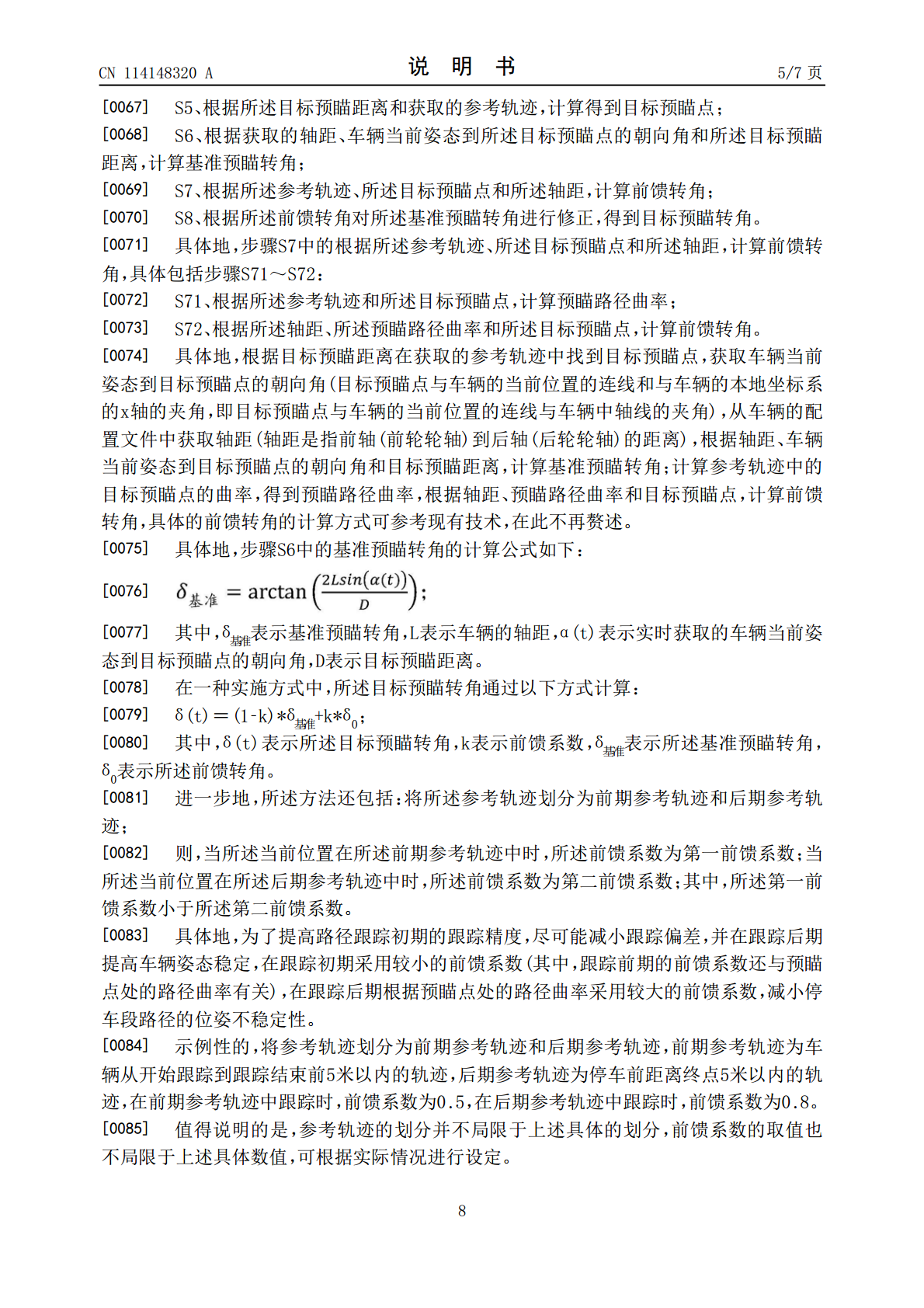
本发明公开了一种双舵轮AGV路径跟踪控制方法及设备、存储介质,方法包括:构建在随动坐标系下的运动学模型,通过引入新的控制变量,对运动学模型进行更新,并将更新后的运动学模型进行求解,得到不受两个舵轮的转角影响的控制变量。通过本发明中的方法,去获取双舵轮AGV的控制变量,从而不需要特殊处理AGV的奇异形态,可使AGV以任意姿态角沿路径运动。
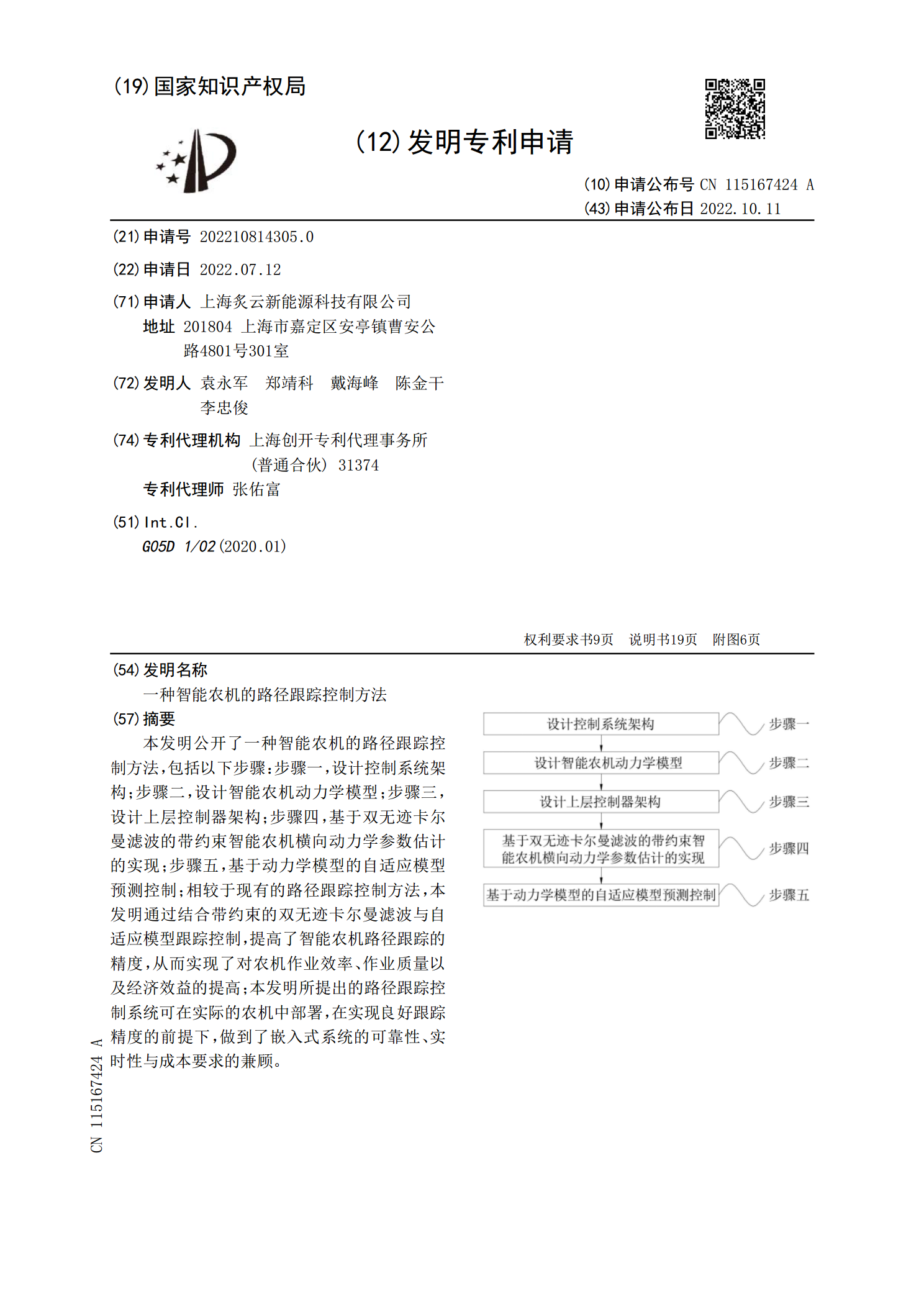
一种智能农机的路径跟踪控制方法.pdf
本发明公开了一种智能农机的路径跟踪控制方法,包括以下步骤:步骤一,设计控制系统架构;步骤二,设计智能农机动力学模型;步骤三,设计上层控制器架构;步骤四,基于双无迹卡尔曼滤波的带约束智能农机横向动力学参数估计的实现;步骤五,基于动力学模型的自适应模型预测控制;相较于现有的路径跟踪控制方法,本发明通过结合带约束的双无迹卡尔曼滤波与自适应模型跟踪控制,提高了智能农机路径跟踪的精度,从而实现了对农机作业效率、作业质量以及经济效益的提高;本发明所提出的路径跟踪控制系统可在实际的农机中部署,在实现良好跟踪精度的前提下

一种两轴奇异路径光电跟踪控制方法.pdf
本发明公开了一种用于稳定跟踪平台的两轴奇异路径光电跟踪的控制方法,包括步骤:获取用于稳定跟踪平台的空间的映射表达式;将稳定跟踪平台的两轴坐标模型极坐标化;为稳定跟踪平台增加虚拟路径α,使得通过两轴运动和虚拟运动路径之和为0;求解稳定跟踪平台的奇异点。本发明克服了两轴的稳定跟踪平台存在过顶盲区问题。
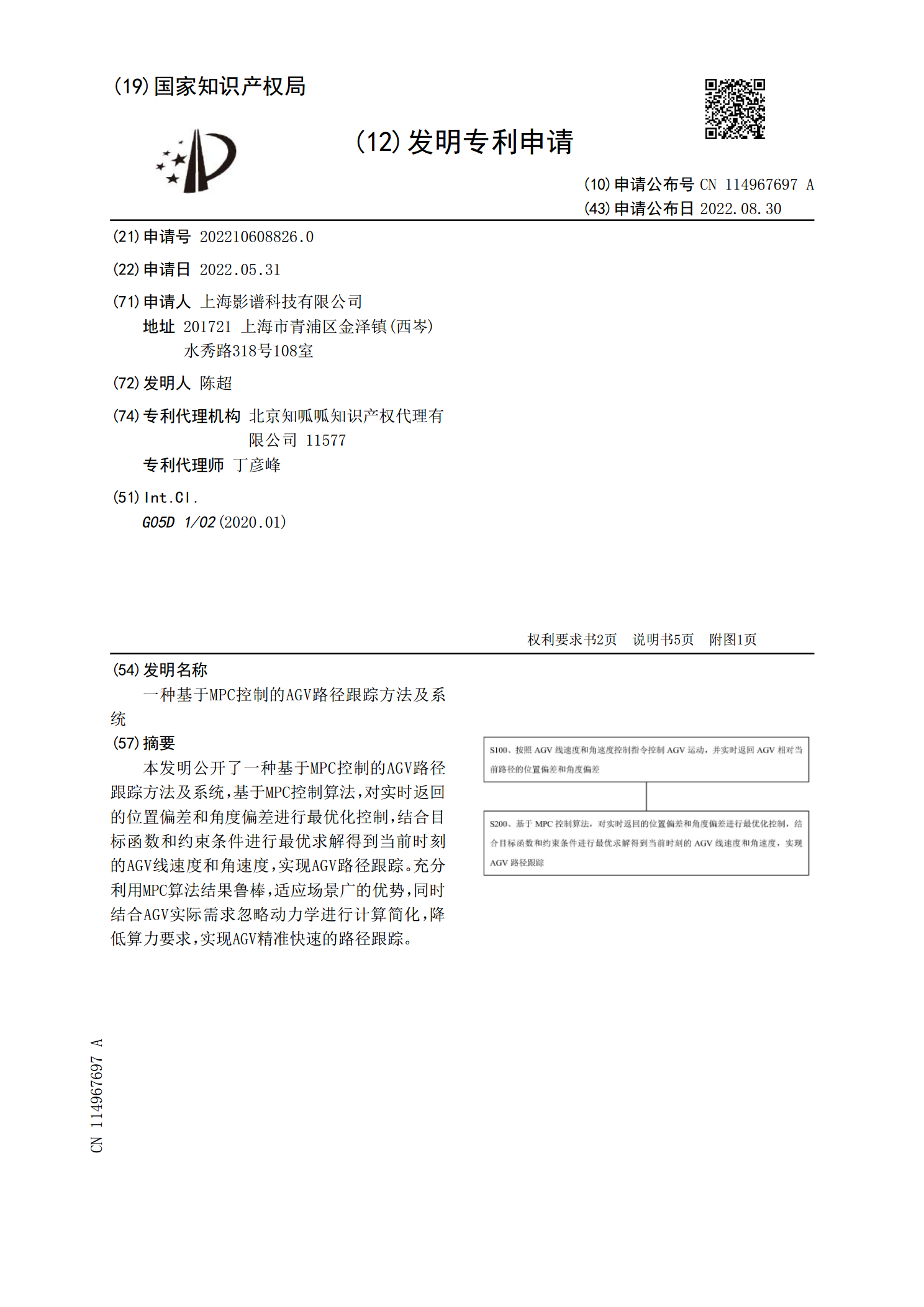
一种基于MPC控制的AGV路径跟踪方法及系统.pdf
本发明公开了一种基于MPC控制的AGV路径跟踪方法及系统,基于MPC控制算法,对实时返回的位置偏差和角度偏差进行最优化控制,结合目标函数和约束条件进行最优求解得到当前时刻的AGV线速度和角速度,实现AGV路径跟踪。充分利用MPC算法结果鲁棒,适应场景广的优势,同时结合AGV实际需求忽略动力学进行计算简化,降低算力要求,实现AGV精准快速的路径跟踪。