
一种基于素描信息的光学遥感图像舰船轮廓提取方法.pdf

邻家****文章

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于素描信息的光学遥感图像舰船轮廓提取方法.pdf
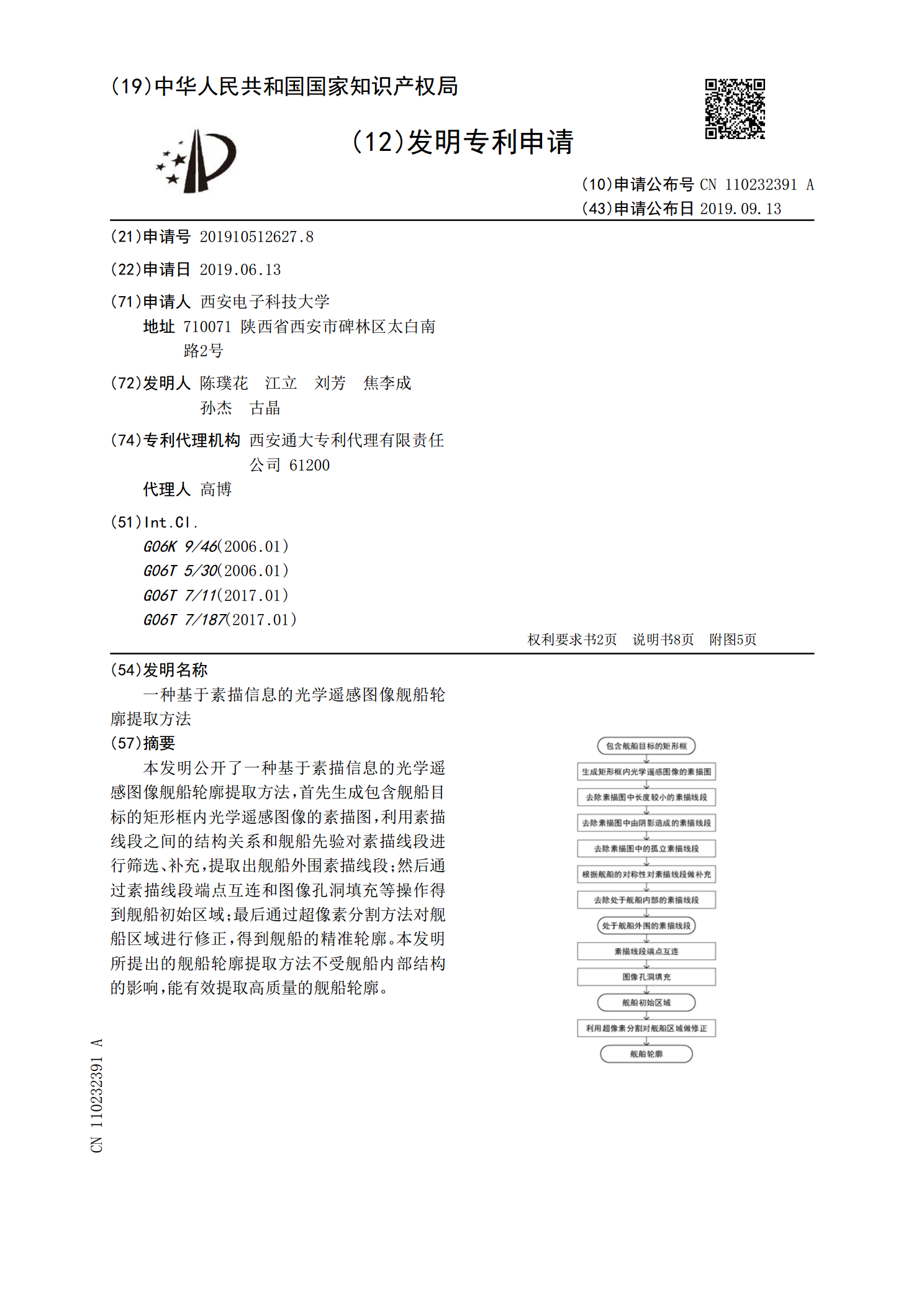
本发明公开了一种基于素描信息的光学遥感图像舰船轮廓提取方法,首先生成包含舰船目标的矩形框内光学遥感图像的素描图,利用素描线段之间的结构关系和舰船先验对素描线段进行筛选、补充,提取出舰船外围素描线段;然后通过素描线段端点互连和图像孔洞填充等操作得到舰船初始区域;最后通过超像素分割方法对舰船区域进行修正,得到舰船的精准轮廓。本发明所提出的舰船轮廓提取方法不受舰船内部结构的影响,能有效提取高质量的舰船轮廓。
基于感知向量的光学遥感图像舰船检测方法及系统.pdf
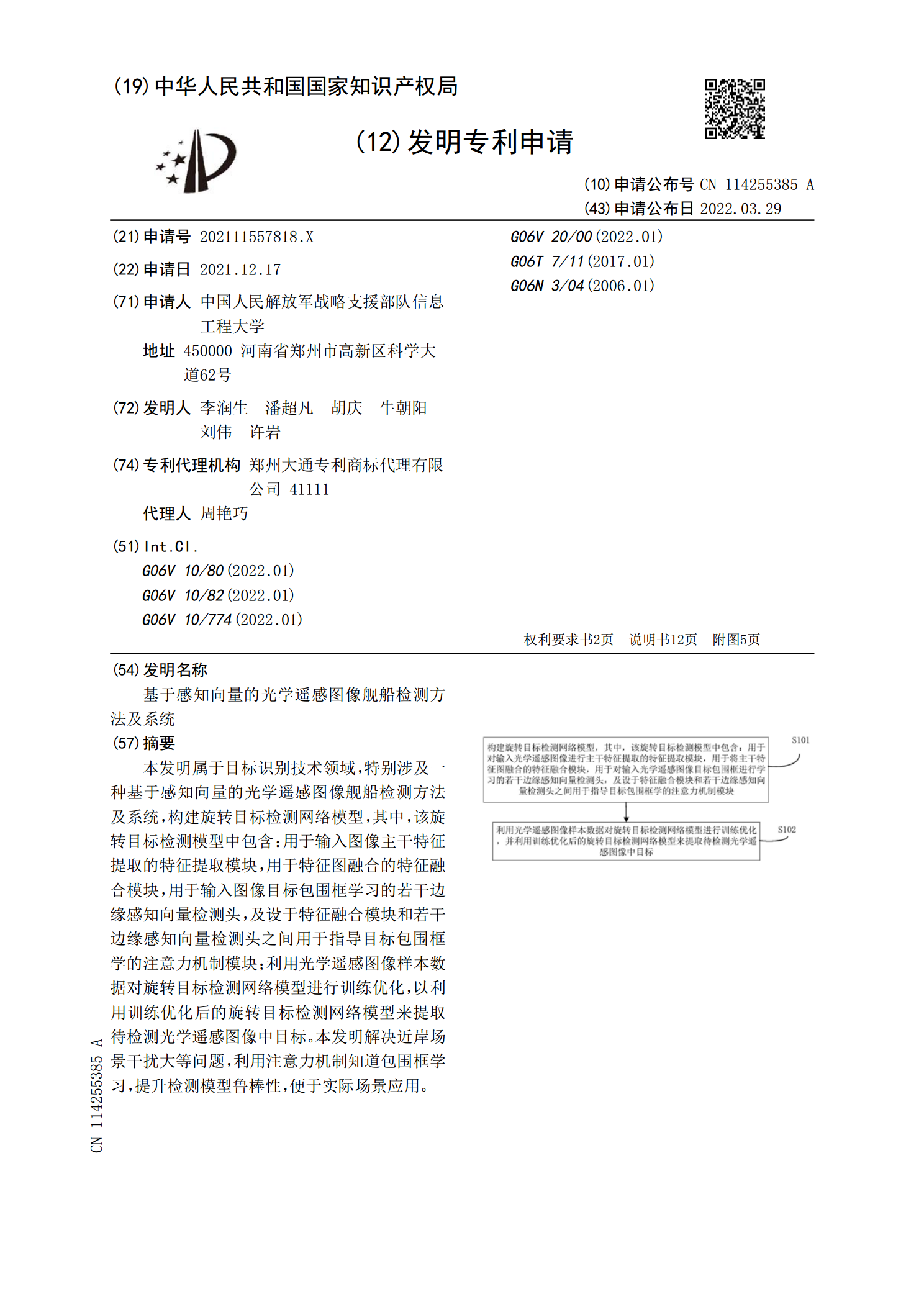
本发明属于目标识别技术领域,特别涉及一种基于感知向量的光学遥感图像舰船检测方法及系统,构建旋转目标检测网络模型,其中,该旋转目标检测模型中包含:用于输入图像主干特征提取的特征提取模块,用于特征图融合的特征融合模块,用于输入图像目标包围框学习的若干边缘感知向量检测头,及设于特征融合模块和若干边缘感知向量检测头之间用于指导目标包围框学的注意力机制模块;利用光学遥感图像样本数据对旋转目标检测网络模型进行训练优化,以利用训练优化后的旋转目标检测网络模型来提取待检测光学遥感图像中目标。本发明解决近岸场景干扰大等问题

基于非下采样轮廓波变换的遥感图像道路提取方法.pdf
本发明公开了一种从遥感图像中提取道路的方法,属于图像处理技术领域,主要解决现有技术对道路检测定位不够准确、虚假目标多且连续性较差的问题。具体实现过程是:首先,对输入图像进行包括自适应直方图均衡化和Frost去噪的预处理;然后对其进行3层非下采样轮廓波变换,每层分解为8个方向,提取第1层和第2层各方向子带的模极大值作为道路的线性特征向量;再采用模糊C均值聚类算法对得到的特征向量进行聚类,获得道路的初始提取结果;最后,对初始提取进行非极大值抑制以及基于空间关系的道路后处理,得到最终的道路提取结果。

基于轮廓波变换的光学遥感图像变化检测方法.pdf
本发明公开了一种基于轮廓波变换的光学遥感图像变化检测方法,主要解决现有变化检测技术检测结果精度不高的问题。其实现过程为:对同一地域不同时间获取的两幅光学遥感图像预处理后,分别构造均值比法差异图和比值法差异图;对这两幅差异图分别进行N层轮廓波变换获取各分解层高频带和低频带的轮廓波系数;对高频带和低频带的轮廓波系数分别用不同的融合算子融合处理,得到高频带和低频带的融合轮廓波系数;对高频带和低频带的融合轮廓波系数进行逆变换得到融合后差异图;运用模糊局部C均值聚类法分割融合后的差异图,得到变化检测结果。本发明通过
一种基于形态分析的图像轮廓信息提取方法.pdf
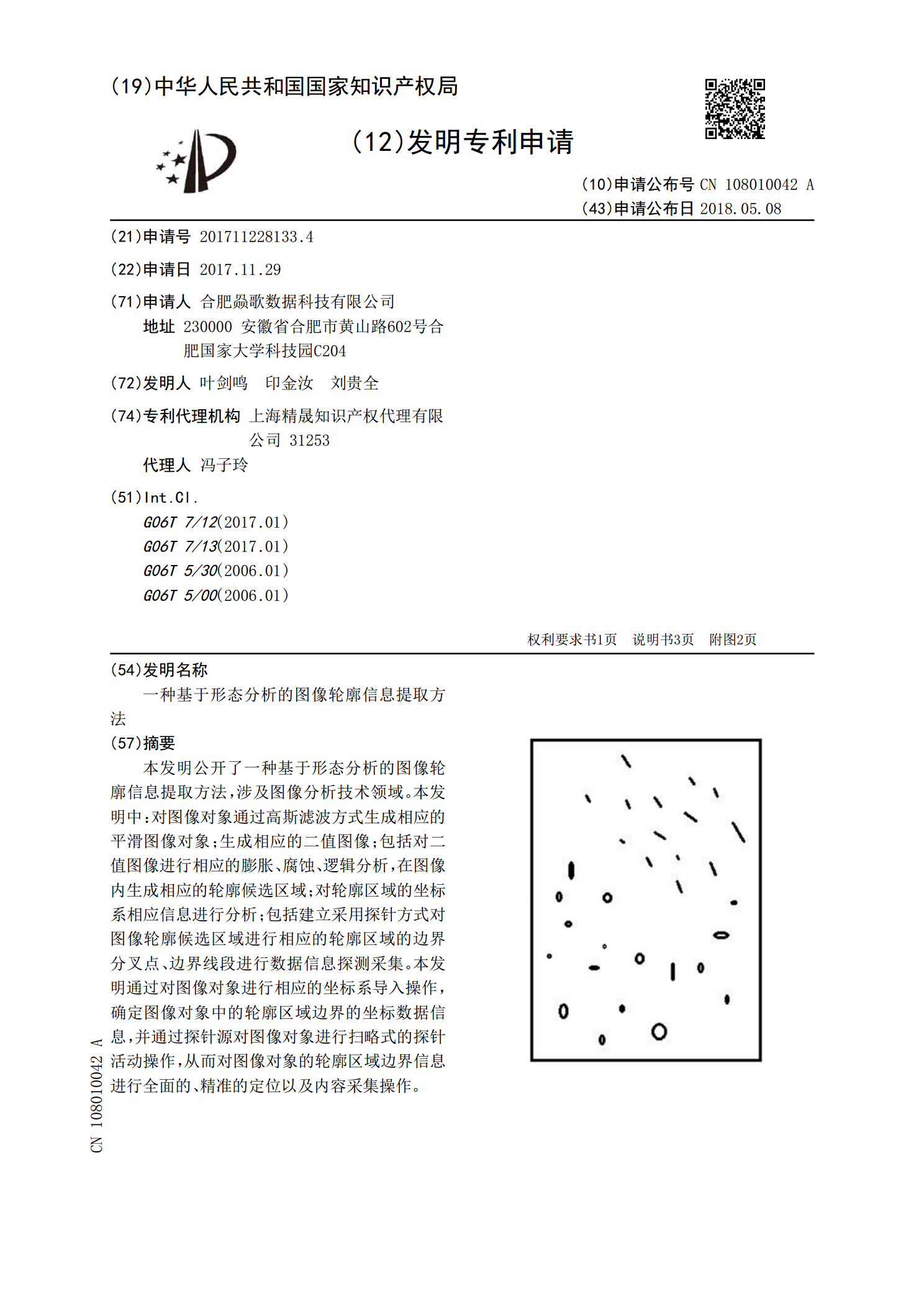
本发明公开了一种基于形态分析的图像轮廓信息提取方法,涉及图像分析技术领域。本发明中:对图像对象通过高斯滤波方式生成相应的平滑图像对象;生成相应的二值图像;包括对二值图像进行相应的膨胀、腐蚀、逻辑分析,在图像内生成相应的轮廓候选区域;对轮廓区域的坐标系相应信息进行分析;包括建立采用探针方式对图像轮廓候选区域进行相应的轮廓区域的边界分叉点、边界线段进行数据信息探测采集。本发明通过对图像对象进行相应的坐标系导入操作,确定图像对象中的轮廓区域边界的坐标数据信息,并通过探针源对图像对象进行扫略式的探针活动操作,从而