
基于感知向量的光学遥感图像舰船检测方法及系统.pdf

邻家****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于感知向量的光学遥感图像舰船检测方法及系统.pdf
本发明属于目标识别技术领域,特别涉及一种基于感知向量的光学遥感图像舰船检测方法及系统,构建旋转目标检测网络模型,其中,该旋转目标检测模型中包含:用于输入图像主干特征提取的特征提取模块,用于特征图融合的特征融合模块,用于输入图像目标包围框学习的若干边缘感知向量检测头,及设于特征融合模块和若干边缘感知向量检测头之间用于指导目标包围框学的注意力机制模块;利用光学遥感图像样本数据对旋转目标检测网络模型进行训练优化,以利用训练优化后的旋转目标检测网络模型来提取待检测光学遥感图像中目标。本发明解决近岸场景干扰大等问题
一种基于动态边界覆盖的并行遥感图像舰船检测方法.pdf
本发明一种基于动态边界覆盖的并行遥感图像舰船检测方法,步骤如下:进行原始遥感卫星数据影像预处理;设定不同的重叠值,以该重叠值切分原始遥感卫星数据影像,得到遥感卫星切分数据;结合原始SSD深度学习网络模型,修改网络结构,得到训练之后的模型网络;将遥感卫星切分数据输入训练之后的模型网络,进行舰船目标分割,得到舰船目标矢量数据;对舰船目标矢量数据后处理,并进行数据的剔除、拼接、转换和统计。
基于视觉注意机制和信息熵的遥感图像海面舰船检测方法.pdf
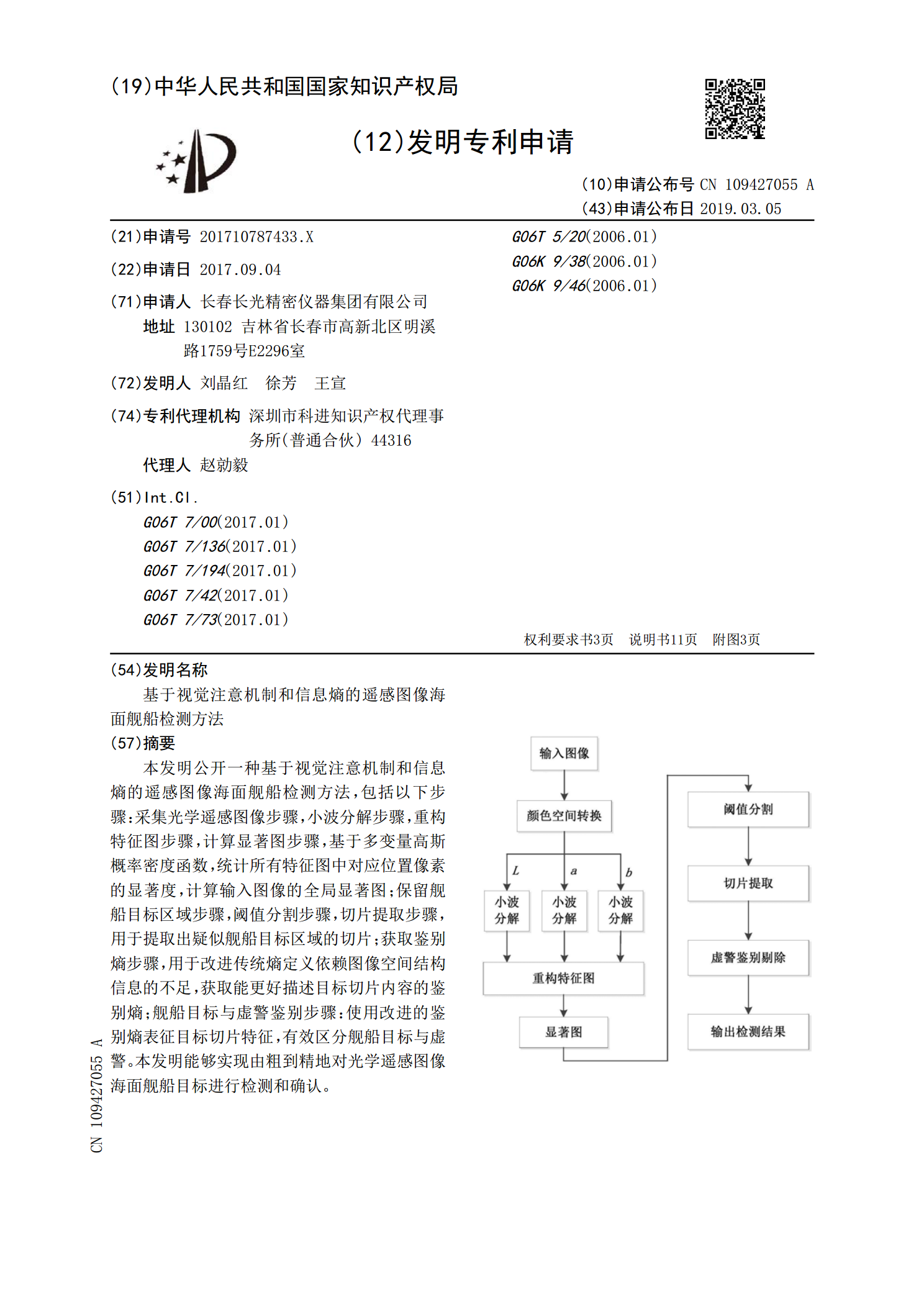
本发明公开一种基于视觉注意机制和信息熵的遥感图像海面舰船检测方法,包括以下步骤:采集光学遥感图像步骤,小波分解步骤,重构特征图步骤,计算显著图步骤,基于多变量高斯概率密度函数,统计所有特征图中对应位置像素的显著度,计算输入图像的全局显著图;保留舰船目标区域步骤,阈值分割步骤,切片提取步骤,用于提取出疑似舰船目标区域的切片;获取鉴别熵步骤,用于改进传统熵定义依赖图像空间结构信息的不足,获取能更好描述目标切片内容的鉴别熵;舰船目标与虚警鉴别步骤:使用改进的鉴别熵表征目标切片特征,有效区分舰船目标与虚警。本发明
一种基于素描信息的光学遥感图像舰船轮廓提取方法.pdf
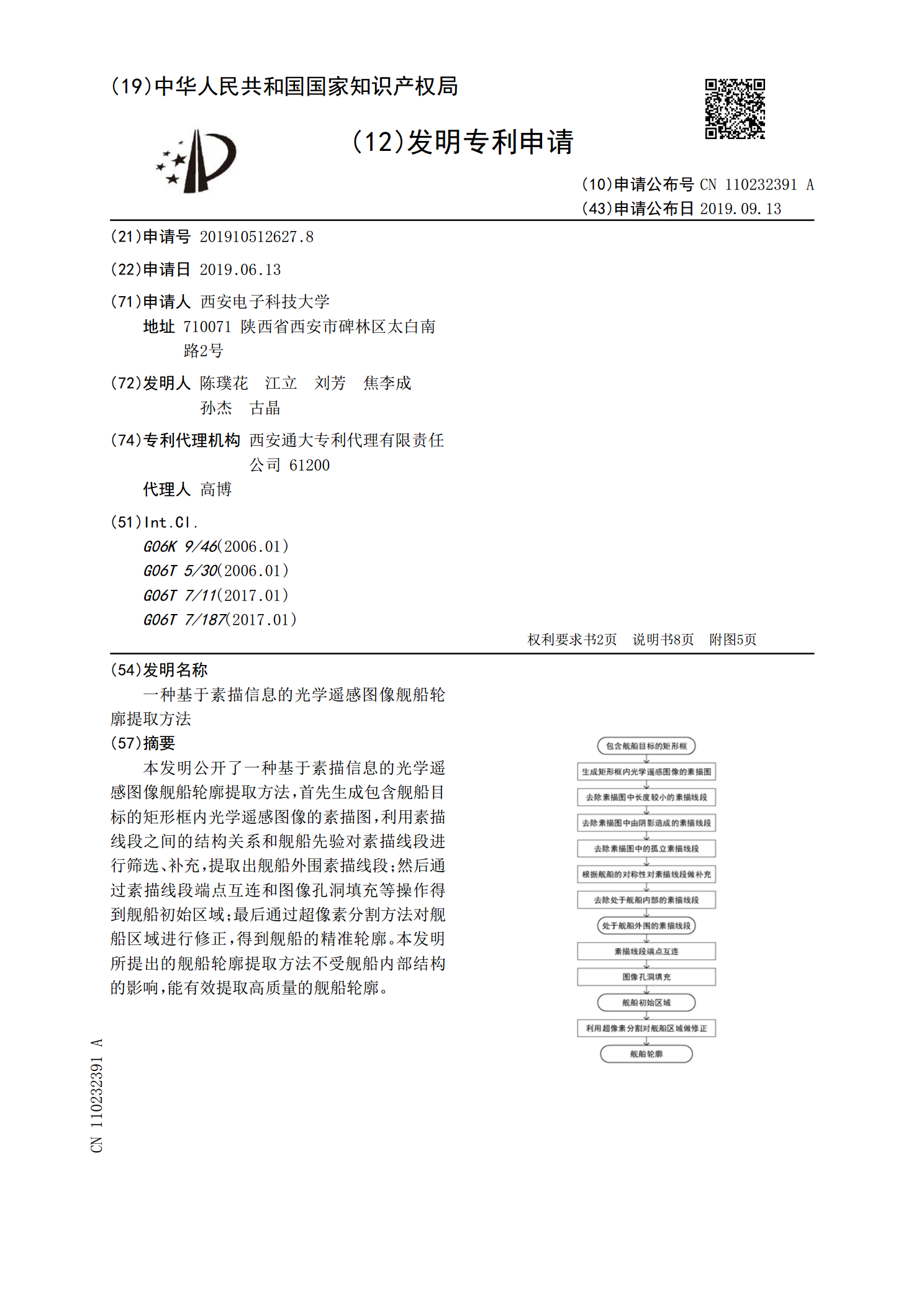
本发明公开了一种基于素描信息的光学遥感图像舰船轮廓提取方法,首先生成包含舰船目标的矩形框内光学遥感图像的素描图,利用素描线段之间的结构关系和舰船先验对素描线段进行筛选、补充,提取出舰船外围素描线段;然后通过素描线段端点互连和图像孔洞填充等操作得到舰船初始区域;最后通过超像素分割方法对舰船区域进行修正,得到舰船的精准轮廓。本发明所提出的舰船轮廓提取方法不受舰船内部结构的影响,能有效提取高质量的舰船轮廓。
基于注意力机制的遥感图像小样本舰船检测方法.pdf
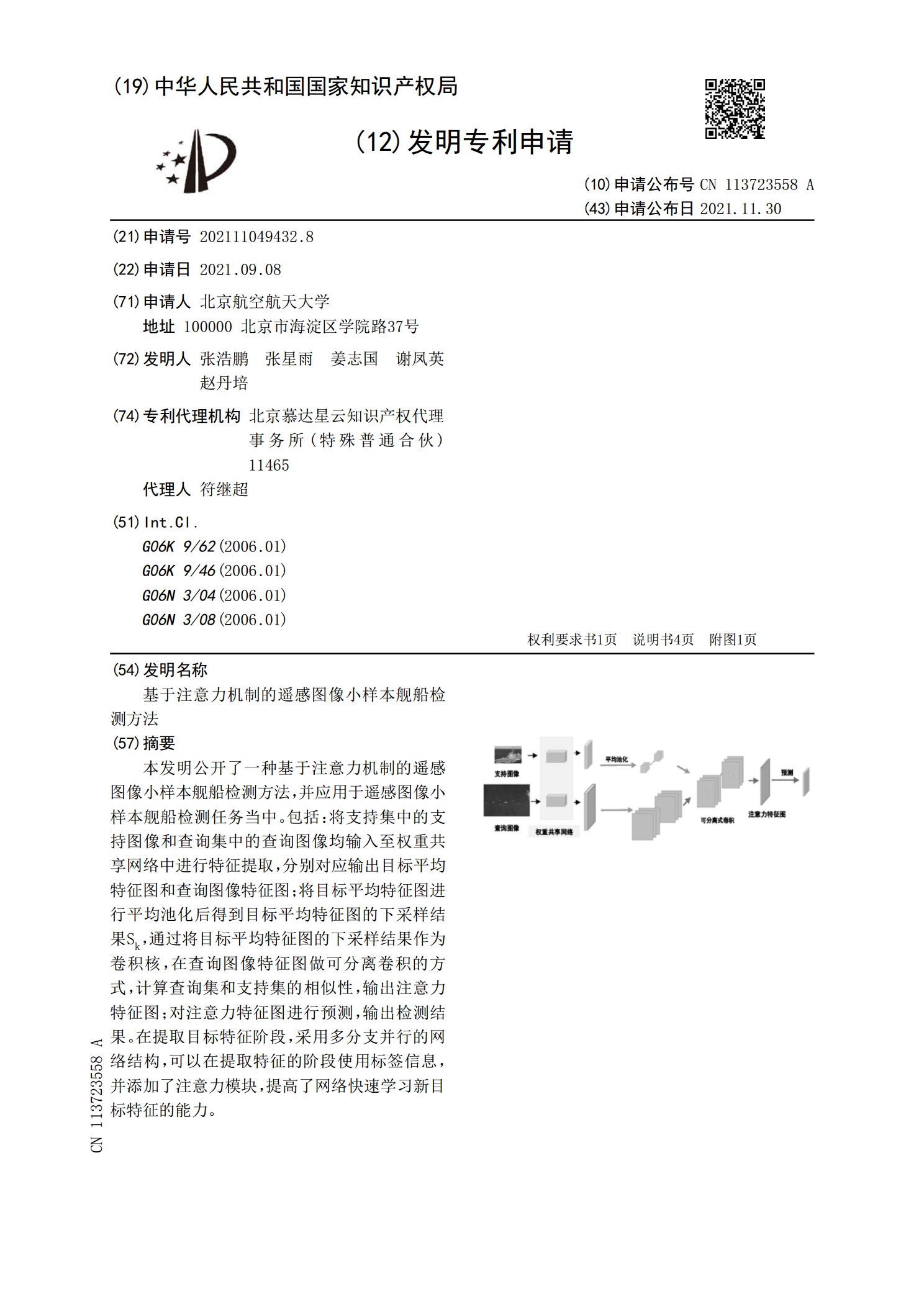
本发明公开了一种基于注意力机制的遥感图像小样本舰船检测方法,并应用于遥感图像小样本舰船检测任务当中。包括:将支持集中的支持图像和查询集中的查询图像均输入至权重共享网络中进行特征提取,分别对应输出目标平均特征图和查询图像特征图;将目标平均特征图进行平均池化后得到目标平均特征图的下采样结果S