
一种巡检机器人的行走装置.pdf

是飞****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种巡检机器人的行走装置及巡检机器人.pdf
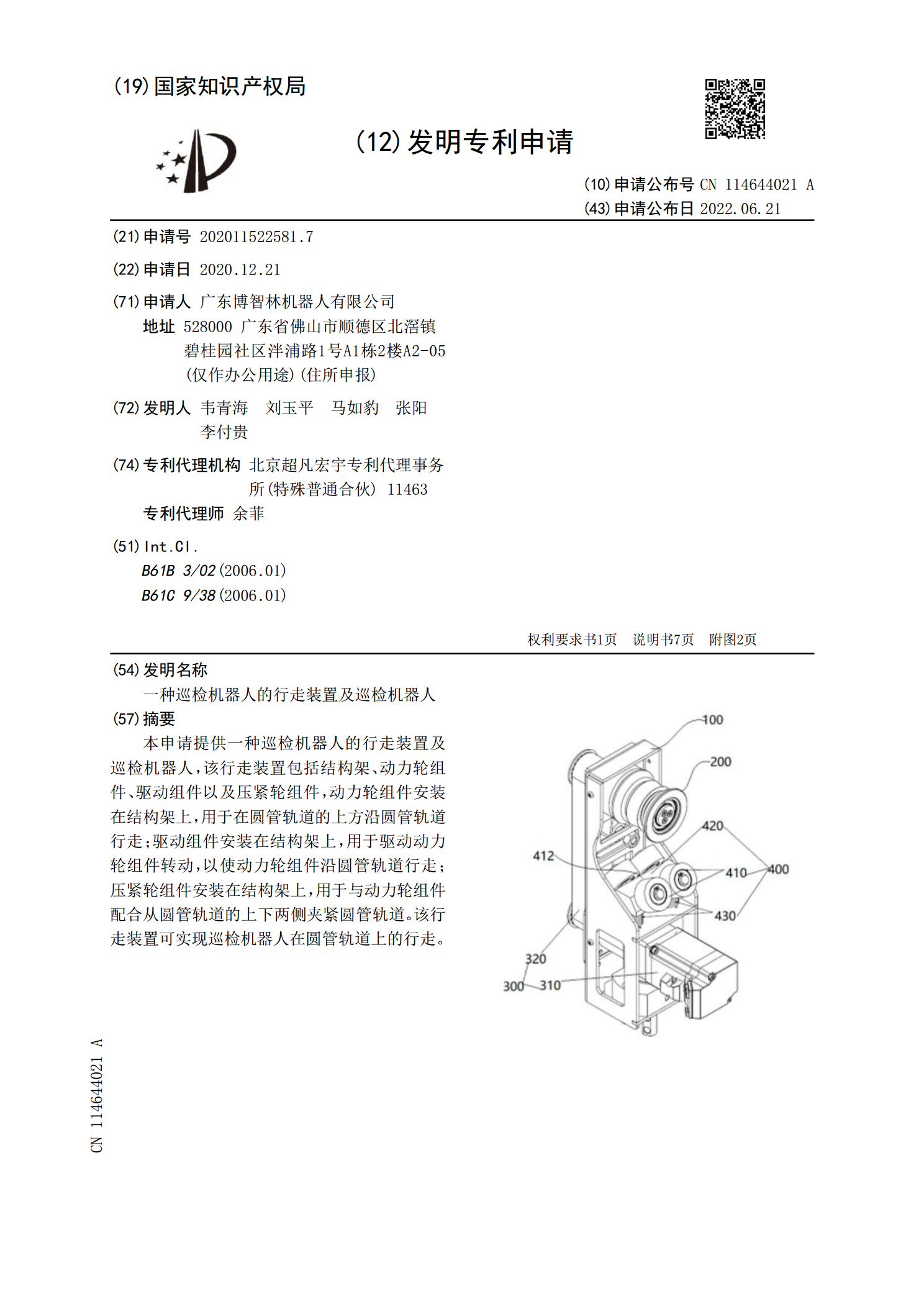
本申请提供一种巡检机器人的行走装置及巡检机器人,该行走装置包括结构架、动力轮组件、驱动组件以及压紧轮组件,动力轮组件安装在结构架上,用于在圆管轨道的上方沿圆管轨道行走;驱动组件安装在结构架上,用于驱动动力轮组件转动,以使动力轮组件沿圆管轨道行走;压紧轮组件安装在结构架上,用于与动力轮组件配合从圆管轨道的上下两侧夹紧圆管轨道。该行走装置可实现巡检机器人在圆管轨道上的行走。

一种巡检机器人的行走装置.pdf
本发明公开了一种巡检机器人的行走装置,行走轮通过行走轮轴支承在行走轮支架上,所述的行走轮轴与万向节联轴器相连后与动力轴相连,所述的动力轴支撑在连接板上,还包括有行走轮摆动控制组件,在行走轮的下方设置有与行走轮配合使用的压紧轮,压紧轮支撑在压紧轮支架上,还包括有压紧轮摆动组件。本发明由于设置了行走轮摆动组件,因此使得行走轮在行走过程中可实现在一定范围内以万向联轴器的中心为圆心进行左右摆动,同时还设置了压紧轮摆动组件,使得压紧轮可同步实现一定范围的摆动,从而实现本巡检机器人行走装置自适应摆动过障。
一种输电线巡检机器人的行走夹持装置.pdf
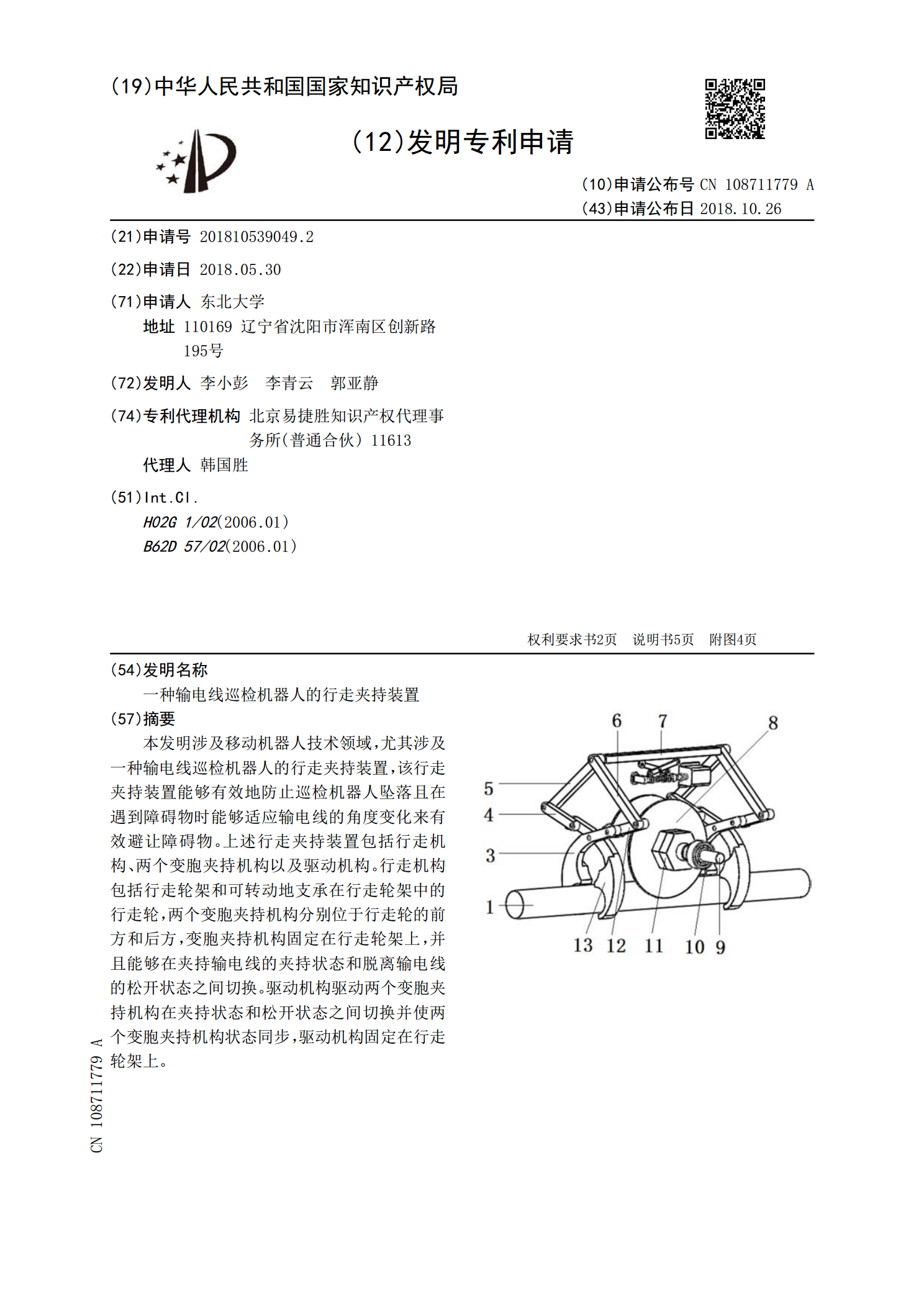
本发明涉及移动机器人技术领域,尤其涉及一种输电线巡检机器人的行走夹持装置,该行走夹持装置能够有效地防止巡检机器人坠落且在遇到障碍物时能够适应输电线的角度变化来有效避让障碍物。上述行走夹持装置包括行走机构、两个变胞夹持机构以及驱动机构。行走机构包括行走轮架和可转动地支承在行走轮架中的行走轮,两个变胞夹持机构分别位于行走轮的前方和后方,变胞夹持机构固定在行走轮架上,并且能够在夹持输电线的夹持状态和脱离输电线的松开状态之间切换。驱动机构驱动两个变胞夹持机构在夹持状态和松开状态之间切换并使两个变胞夹持机构状态同步

一种高压巡检移动机器人行走装置.pdf
本发明公开了一种高压巡检移动机器人行走装置,包括主体,所述主体的顶部固定连接有夹持框,所述夹持框的侧壁固定连接有电机框,所述电机框的内部固定连接有第一电机,所述第一电机的输出轴固定连接有第一齿轮,所述第一齿轮啮合传动有第二齿轮,本发明涉及电力检测技术领域。该高压巡检移动机器人行走装置,达到了主导轮与副导轮配合,在高压线上进行滑动,同时三组可以间歇打开、闭合,避开障碍物,提高装置的实用性,减少劳动力的目的,达到了对高压线进行夹持,第二电机带动运动杆运动,从而推动主体向前运动,提高装置的工作效率的目的,达到了

一种巡检机器人的行走轮.pdf
本发明公开了一种巡检机器人的行走轮,包括有空心的支撑轴心、位于支撑轴心外的摩擦轮、位于摩擦轮外的外侧轮,支承轴心、摩擦轮及外侧轮均由对称布置的左右两半构成,左右对称的摩擦轮及外侧轮两半之间形成一个用于容纳导线的弧形或V形凹槽,还包括有一导电环,所述的导电环的内圈嵌入到支撑轴心,导电环的外圈构成凹槽的槽底,还包括有两个的外侧支撑件。本发明行走轮采用柔性设计,增加随动性,在行走轮通过障碍物时,外部行走轮片会随障碍物宽度张开一定的位移量,从而降低了行走轮随障碍物抬升的高度,降低了颠簸程度。