
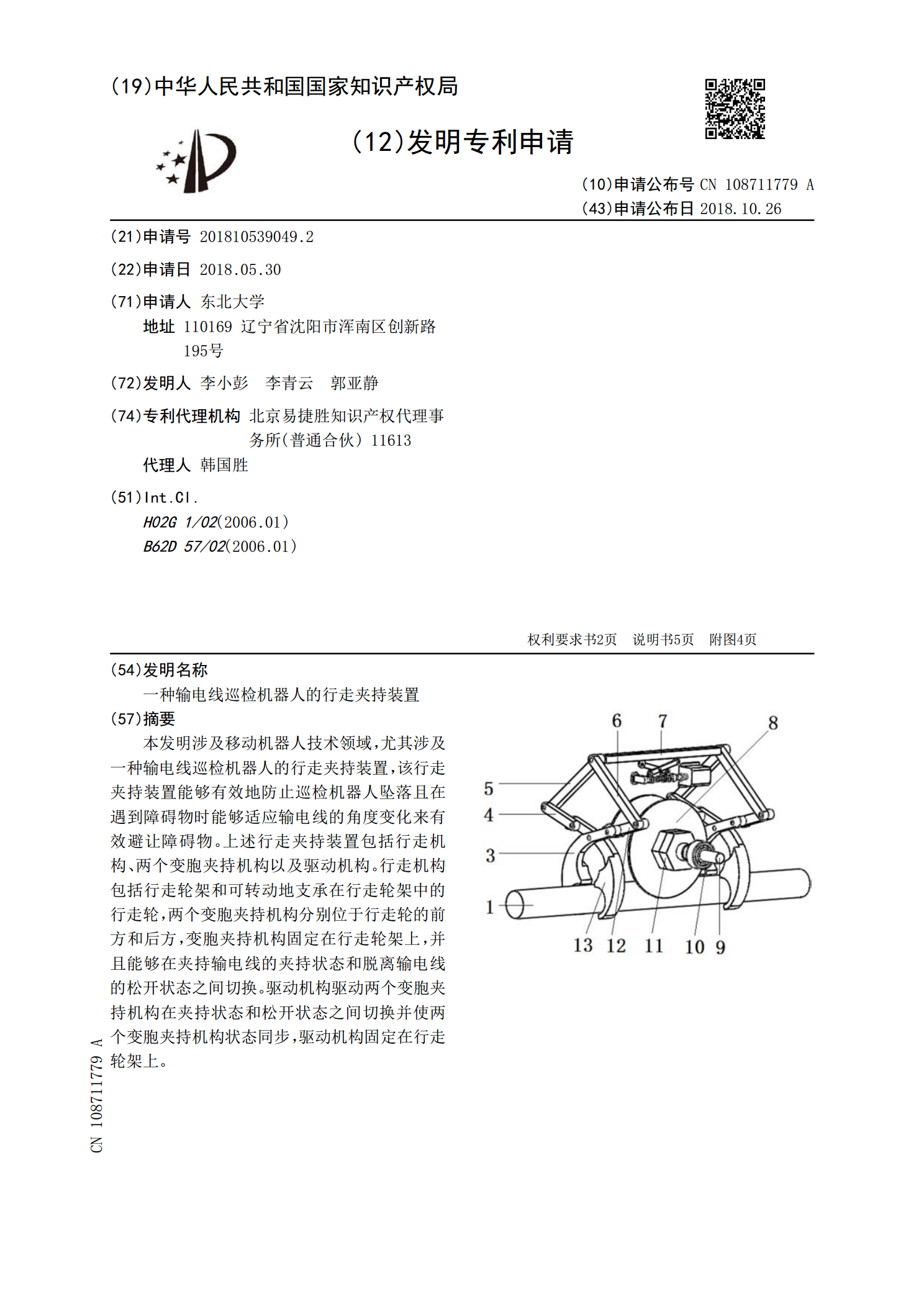
一种输电线巡检机器人的行走夹持装置.pdf

佳晨****ng


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种输电线巡检机器人的行走夹持装置.pdf
本发明涉及移动机器人技术领域,尤其涉及一种输电线巡检机器人的行走夹持装置,该行走夹持装置能够有效地防止巡检机器人坠落且在遇到障碍物时能够适应输电线的角度变化来有效避让障碍物。上述行走夹持装置包括行走机构、两个变胞夹持机构以及驱动机构。行走机构包括行走轮架和可转动地支承在行走轮架中的行走轮,两个变胞夹持机构分别位于行走轮的前方和后方,变胞夹持机构固定在行走轮架上,并且能够在夹持输电线的夹持状态和脱离输电线的松开状态之间切换。驱动机构驱动两个变胞夹持机构在夹持状态和松开状态之间切换并使两个变胞夹持机构状态同步
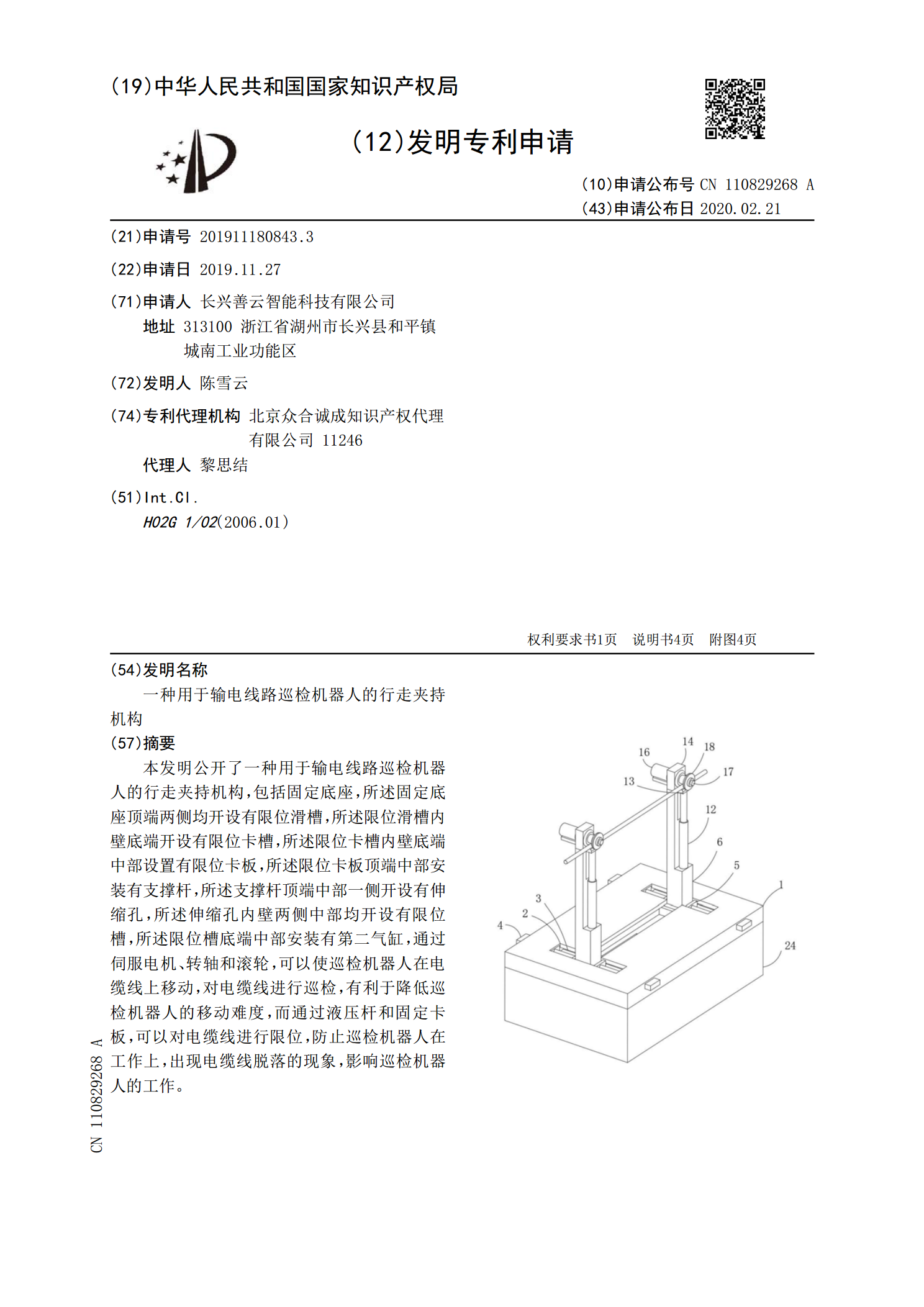
一种用于输电线路巡检机器人的行走夹持机构.pdf
本发明公开了一种用于输电线路巡检机器人的行走夹持机构,包括固定底座,所述固定底座顶端两侧均开设有限位滑槽,所述限位滑槽内壁底端开设有限位卡槽,所述限位卡槽内壁底端中部设置有限位卡板,所述限位卡板顶端中部安装有支撑杆,所述支撑杆顶端中部一侧开设有伸缩孔,所述伸缩孔内壁两侧中部均开设有限位槽,所述限位槽底端中部安装有第二气缸,通过伺服电机、转轴和滚轮,可以使巡检机器人在电缆线上移动,对电缆线进行巡检,有利于降低巡检机器人的移动难度,而通过液压杆和固定卡板,可以对电缆线进行限位,防止巡检机器人在工作上,出现电缆

一种巡检机器人的行走夹持机构.pdf
本发明公开了一种巡检机器人的行走夹持机构,包括支架、连接轴、连杆、夹紧轮和行走轮,支架通过连接轴和连杆与夹紧轮连接,行走轮设置在夹紧轮的上方且容纳在夹紧轮中,行走轮和夹紧轮之间夹持有线缆;连杆包括第一连杆、第二连杆、第三连杆和第四连杆,连接轴包括第一连接轴和第二连接轴;支架通过第一连接轴和第二连接轴分别与第一连杆的一端和第三连杆的一端活动连接,第一连杆的另一端和第三连杆的另一端分别与第二连杆的一端和第四连杆的一端活动连接,第二连杆的另一端和第四连杆的另一端分别与后夹紧轮和前夹紧轮连接。本发明能够有效地防止
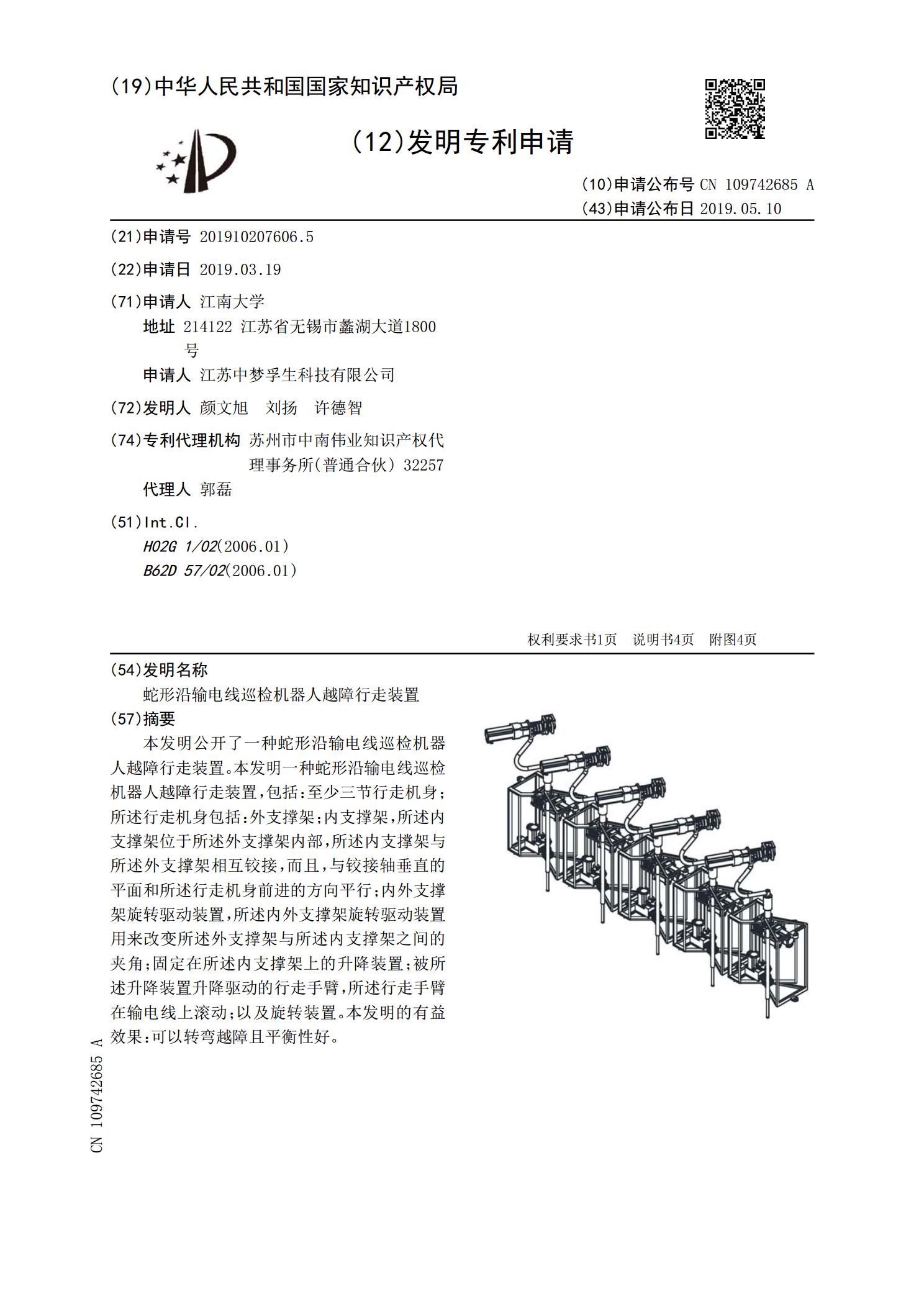
蛇形沿输电线巡检机器人越障行走装置.pdf
本发明公开了一种蛇形沿输电线巡检机器人越障行走装置。本发明一种蛇形沿输电线巡检机器人越障行走装置,包括:至少三节行走机身;所述行走机身包括:外支撑架;内支撑架,所述内支撑架位于所述外支撑架内部,所述内支撑架与所述外支撑架相互铰接,而且,与铰接轴垂直的平面和所述行走机身前进的方向平行;内外支撑架旋转驱动装置,所述内外支撑架旋转驱动装置用来改变所述外支撑架与所述内支撑架之间的夹角;固定在所述内支撑架上的升降装置;被所述升降装置升降驱动的行走手臂,所述行走手臂在输电线上滚动;以及旋转装置。本发明的有益效果:可以
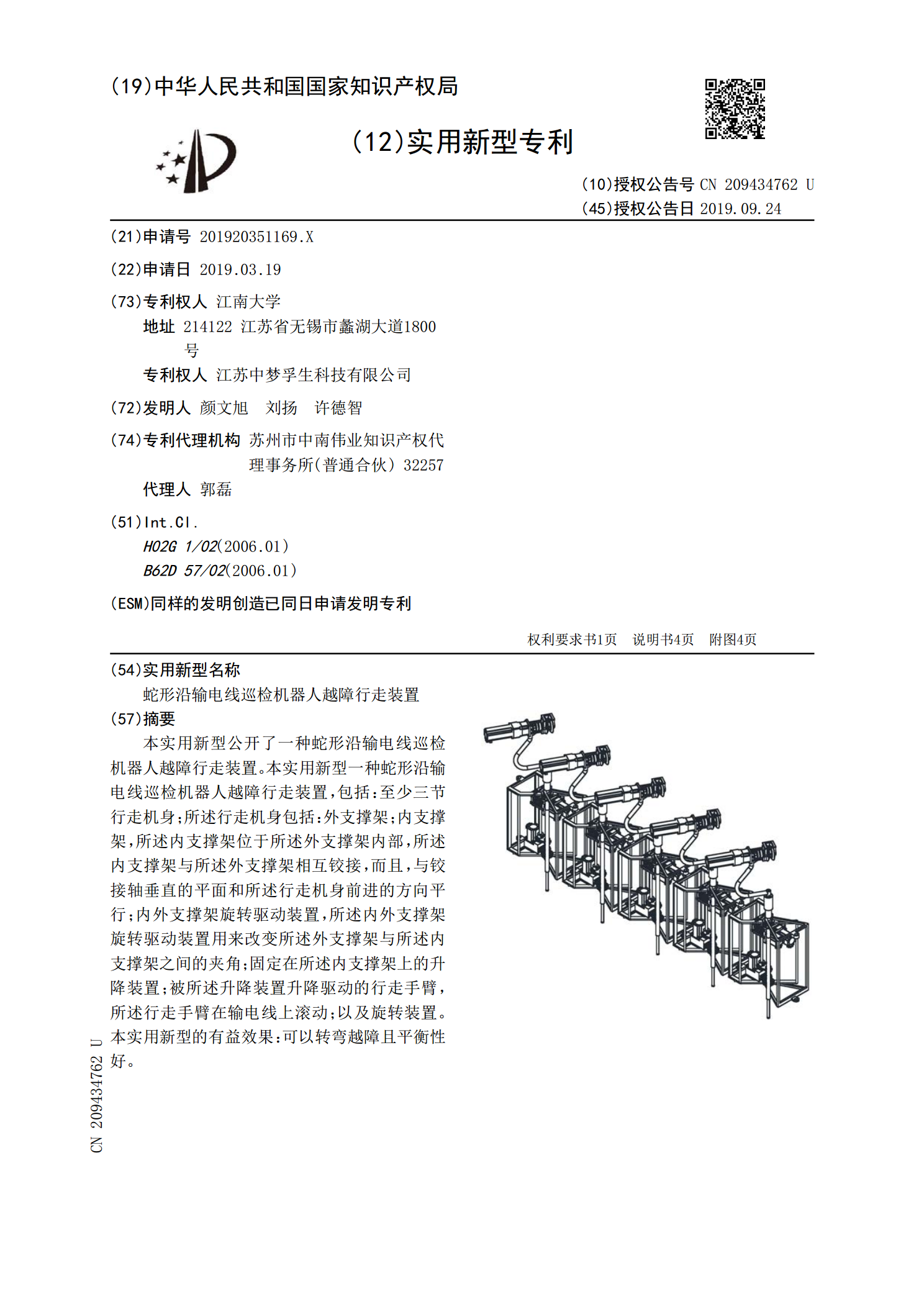
蛇形沿输电线巡检机器人越障行走装置.pdf
本实用新型公开了一种蛇形沿输电线巡检机器人越障行走装置。本实用新型一种蛇形沿输电线巡检机器人越障行走装置,包括:至少三节行走机身;所述行走机身包括:外支撑架;内支撑架,所述内支撑架位于所述外支撑架内部,所述内支撑架与所述外支撑架相互铰接,而且,与铰接轴垂直的平面和所述行走机身前进的方向平行;内外支撑架旋转驱动装置,所述内外支撑架旋转驱动装置用来改变所述外支撑架与所述内支撑架之间的夹角;固定在所述内支撑架上的升降装置;被所述升降装置升降驱动的行走手臂,所述行走手臂在输电线上滚动;以及旋转装置。本实用新型的有