
自移动机器人的行走作业方法.pdf

羽沫****魔王

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自移动机器人的行走作业方法.pdf
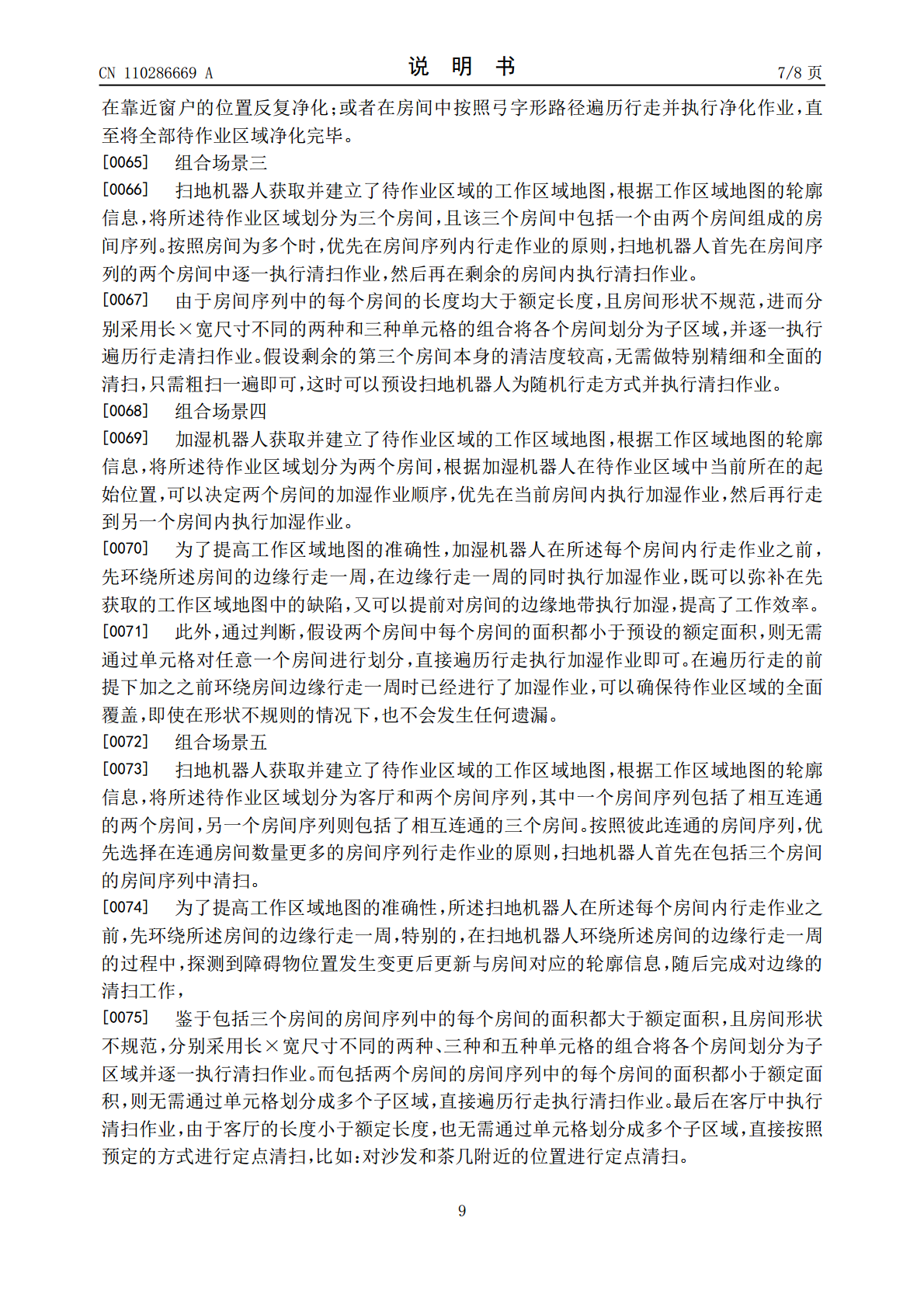
一种自移动机器人的行走作业方法,包括:自移动机器人建立或获取待作业区域的工作区域地图;根据工作区域地图的轮廓信息,将所述待作业区域划分为一个或多个房间,使每个房间与所述轮廓信息相对应;自移动机器人以房间为作业单位,逐一完成每个房间的行走作业。本发明控制过程简单,作业高效;特别的,在每个房间行走作业前,先环绕每个房间的边缘行走一圈,若障碍物的位置发生变化,则更新与房间对应的轮廓信息,并根据更新的地图重新规划行走路径,防止障碍物位置变更导致的碰撞等错误操作,提高作业的准确性和效率。
自移动机器人行走装置、自移动机器人及其行走方法.pdf
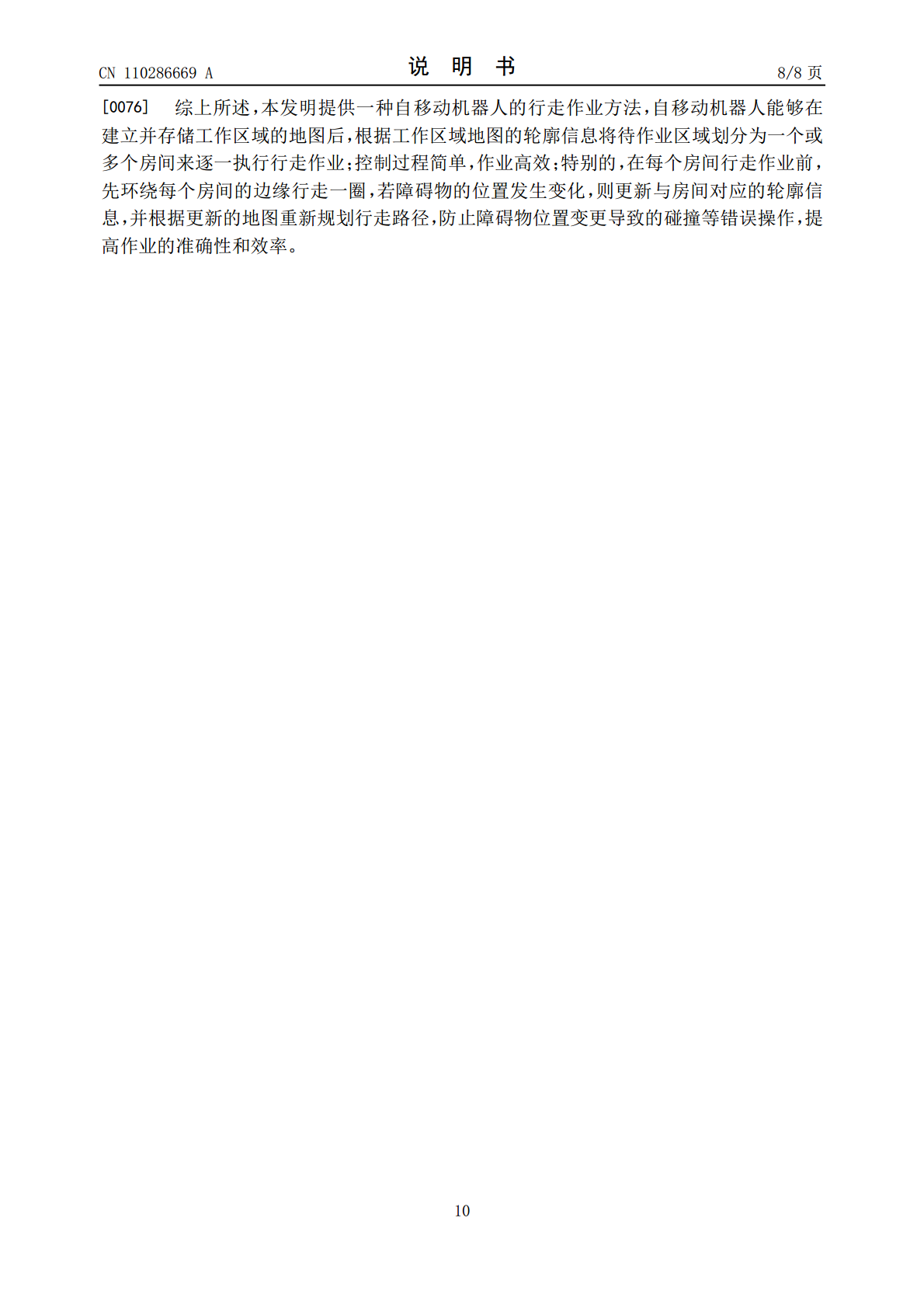
本发明涉及自移动机器人技术领域,公开一种自移动机器人行走装置、自移动机器人及其行走方法。所述行走装置包括驱动轮、检测组件和越障机构,其中检测组件用于检测自移动机器人的行走状态;越障机构用于当检测组件检测到自移动机器人未处于行走状态时,驱动驱动轮下移以增加自移动机器人的离地间隙。所述行走方法包括:S1,检测自移动机器人的行走状态;S2,当检测到自移动机器人未处于行走状态时,控制越障机构动作,使驱动轮由自移动机器人的机身下移,以增加自移动机器人的离地间隙。本发明在遇到障碍物时,使驱动轮相对于机身向外伸出,主动
自移动机器人及其行走方法.pdf
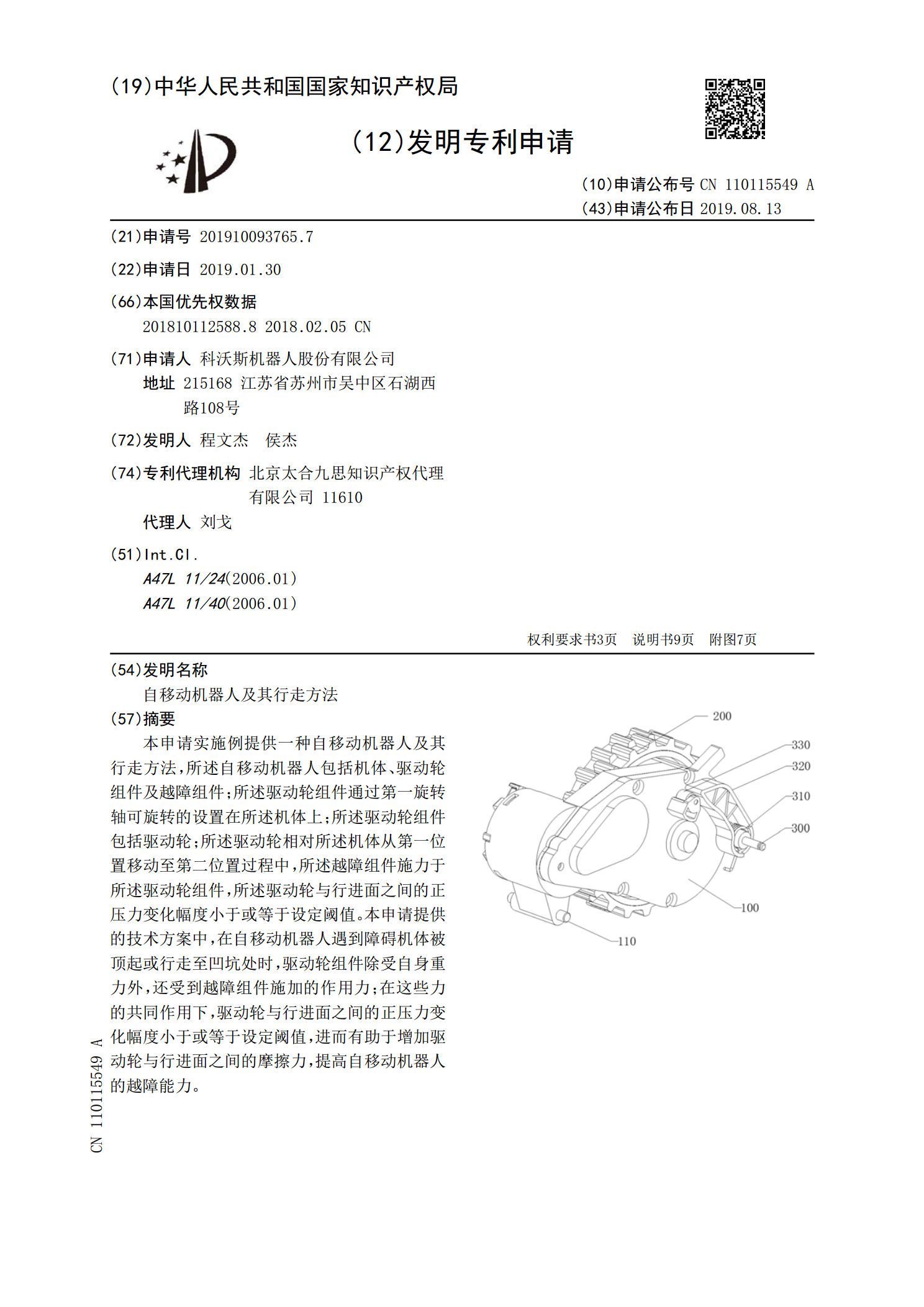
本申请实施例提供一种自移动机器人及其行走方法,所述自移动机器人包括机体、驱动轮组件及越障组件;所述驱动轮组件通过第一旋转轴可旋转的设置在所述机体上;所述驱动轮组件包括驱动轮;所述驱动轮相对所述机体从第一位置移动至第二位置过程中,所述越障组件施力于所述驱动轮组件,所述驱动轮与行进面之间的正压力变化幅度小于或等于设定阈值。本申请提供的技术方案中,在自移动机器人遇到障碍机体被顶起或行走至凹坑处时,驱动轮组件除受自身重力外,还受到越障组件施加的作用力;在这些力的共同作用下,驱动轮与行进面之间的正压力变化幅度小于或

自移动机器人行走方法与装置.pdf
本发明提供一种自移动机器人和自移动机器人利用廉价的普通传感器和微处理器来实现其避障行走的方法,其在所述自移动机器人的行走区域内,以水平方向为X轴,竖直方向为Y轴建立平面直角坐标系,且设定沿着Y轴正向行走为执行去程模式和沿Y轴反向行走为执行回程模式,记录和删除自移动机器人在作业区内的触碰到障碍物后的坐标值,并建立一个障碍物坐标值数据库,还包括一个折返模式,该折返模式有针对性的挑选所述数据库中的三个坐标值进行分析,与所述去程模式和回程模式一起实现对所述行走区域的全区域覆盖,从而使得行走过程真正的有规律,提高行

自移动机器人行走方法与装置.pdf
本发明旨在提供一种自移动机器人自由切换成直线行走和沿障碍物行走的行走方式,其利用廉价的普通传感器和微处理器来实现自移动机器人的行走,从而使得行走过程真正的有规律,提高行走区域的覆盖率,降低行走重复率,并能判断是否清扫完成,降低系统能耗,延长系统有效工作寿命。