
一种可定向转运对象的搬运机械手.pdf

小云****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可定向转运对象的搬运机械手.pdf
一种可定向转运对象的搬运机械手,主臂转动机构(II)的固定轴(2)与安装立柱(1)连接,主轴步进电机(5)和减速器(4)能驱动主臂(3)绕固定轴(2)转动;径向移动机构(III)的光杠(20)用镙钉固定在主臂(3)上,滑块(8)下端与随动转动机构(IV)固定连接;随动转动机构(IV)的随动座(12)上端与滑块(8)下端固定,随动座(12)下端与随动轴(9)通过轴承构成转动副,随动轴(9)下端与竖直移动机构(V)固定连接;竖直移动机构(V)的气缸座(14)固定在随动轴(9)下端;直线气缸(15)下端连接机械

一种物料搬运的转运机械手.pdf
本发明提供一种物料搬运的转运机械手,包括通过支撑架架设的固定环和若干个与固定环配合的机械臂;固定环周向开设有环形槽,环形槽槽内固定配合有齿环;n型板的槽体与固定环的外沿配合;固定环表面开设有弧形通槽;弧形通槽穿过有转轴,转轴固定有与齿环啮合的齿轮;n型板的外部一侧固定设置有第一电机,驱动转轴转动;滑槽架设于n型板顶部,并通过第一转动装置驱动转动;滑槽槽内滑动设置有滑块,通过移动装置驱动;滑块顶部架设有气缸,通过第二转动装置驱动转动,气缸推杆端部固定设置有夹持单元,驱动两个夹持板开闭。该机械手能够完成不同姿

一种物料搬运的转运机械手及其工作方法.pdf
本发明公开了一种物料搬运的转运机械手,属于先进制造与自动化领域,包括第一物料支撑组件、第一物料搬运机械手组件、第二物料搬运机械手组件和物料,所述第一物料搬运机械手组件和第二物料搬运机械手组件对称设置在第一物料支撑组件的两侧;其中,所述第一物料搬运机械手组件和第二物料搬运机械手组件包括基座、支撑台、第一升降驱动组件、第一支撑架、第一线性模组、第一支撑板、第一物料转运组件、第一物料转运机械手和第一物料搬运机械手。其结构简单合理,易于生产,自动化程度高,减少人工劳动量,提高了工作效率,储料量大并且应用灵活。工作

一种机械手可旋转的搬运机器.pdf
本发明公开了一种机械手可旋转的搬运机器,包括搬运基座板,搬运基座板底部设置有驱动滚轮,限位盒内活动卡合有限位滑板,限位滑板上表面右侧前后端均固定安装有立柱,立柱上表面中部均固定焊接有插接杆,插接杆表面均活动套设有轴筒,轴筒外侧表面上端均固定安装有套环,套环右侧端均固定安装有连接杆,连接杆下表面均固定安装有L型板。本发明两组L型板能够插设进货物箱底面,当两组L型板侧板与货物箱侧表面相互贴合时,控制液压杆使限位滑板上移,然后控制伺服电机,使两组L型板离开货物箱底表面,此时货物箱能够稳定放置在矩型盒内,本发明提
一种实心胎搬运机械手及具有该机械手的轮胎转运装置.pdf
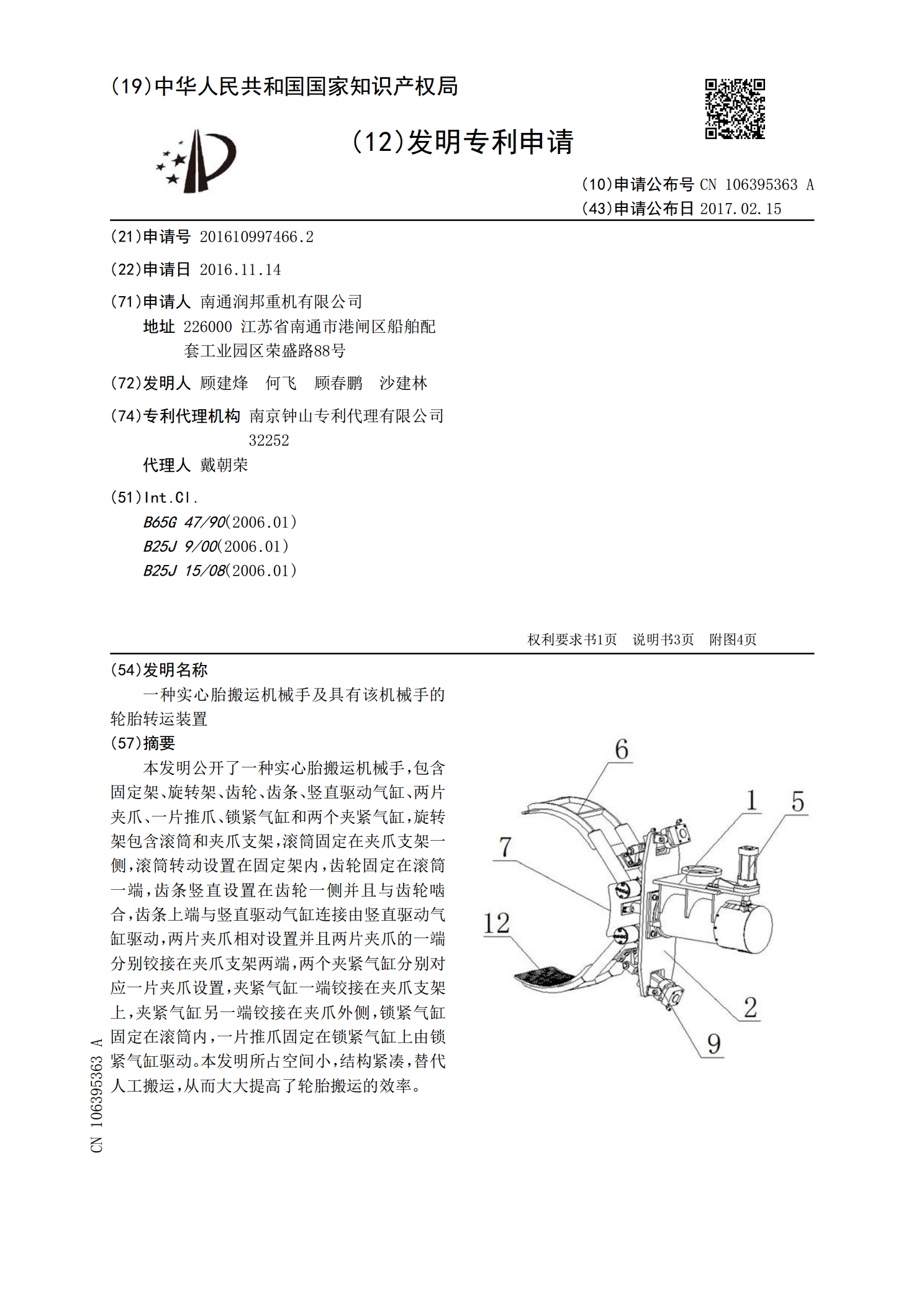
本发明公开了一种实心胎搬运机械手,包含固定架、旋转架、齿轮、齿条、竖直驱动气缸、两片夹爪、一片推爪、锁紧气缸和两个夹紧气缸,旋转架包含滚筒和夹爪支架,滚筒固定在夹爪支架一侧,滚筒转动设置在固定架内,齿轮固定在滚筒一端,齿条竖直设置在齿轮一侧并且与齿轮啮合,齿条上端与竖直驱动气缸连接由竖直驱动气缸驱动,两片夹爪相对设置并且两片夹爪的一端分别铰接在夹爪支架两端,两个夹紧气缸分别对应一片夹爪设置,夹紧气缸一端铰接在夹爪支架上,夹紧气缸另一端铰接在夹爪外侧,锁紧气缸固定在滚筒内,一片推爪固定在锁紧气缸上由锁紧气缸