
一种油电混合动力多旋翼无人机.pdf

一吃****瀚文

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种油电混合动力多旋翼无人机.pdf
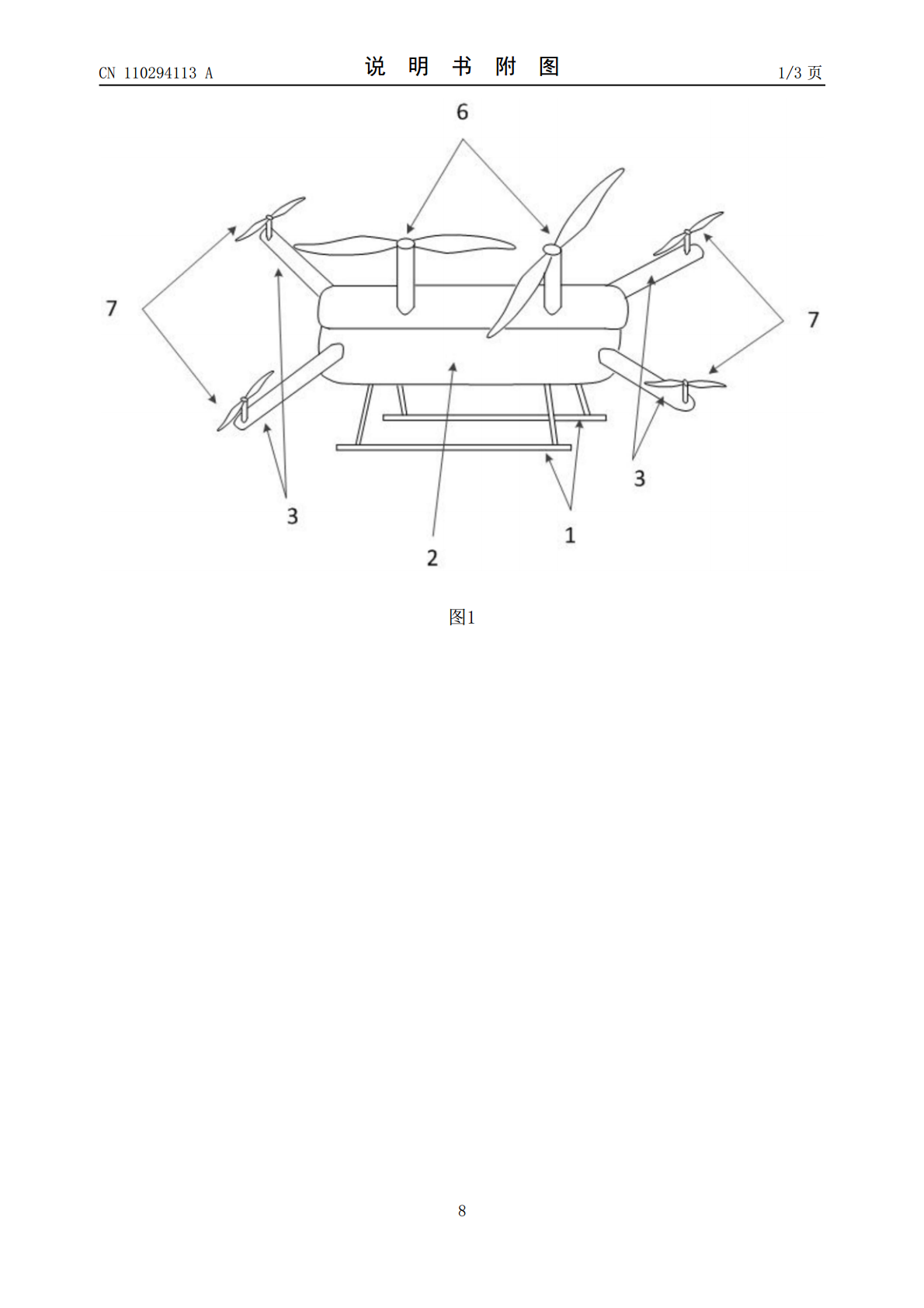
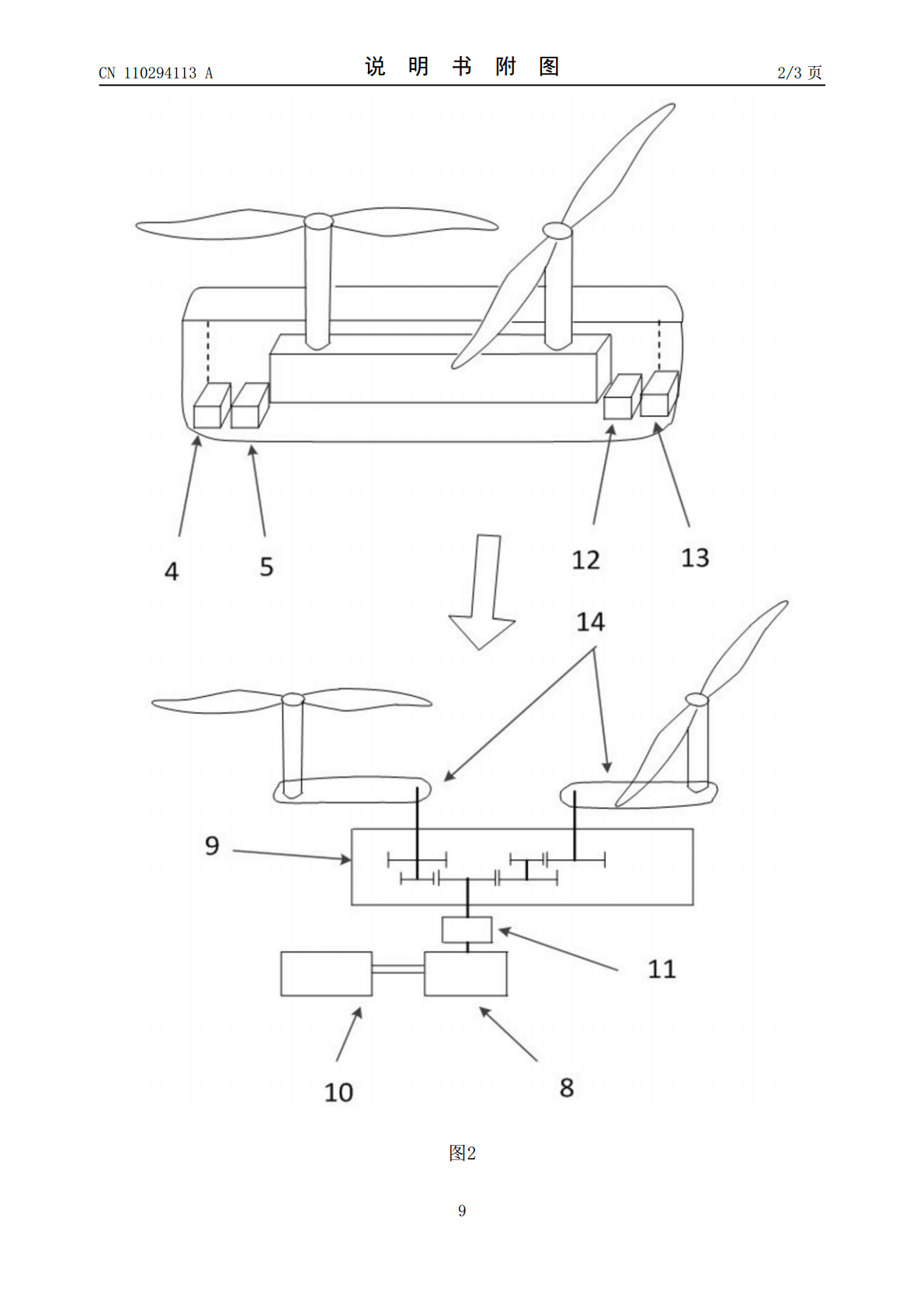
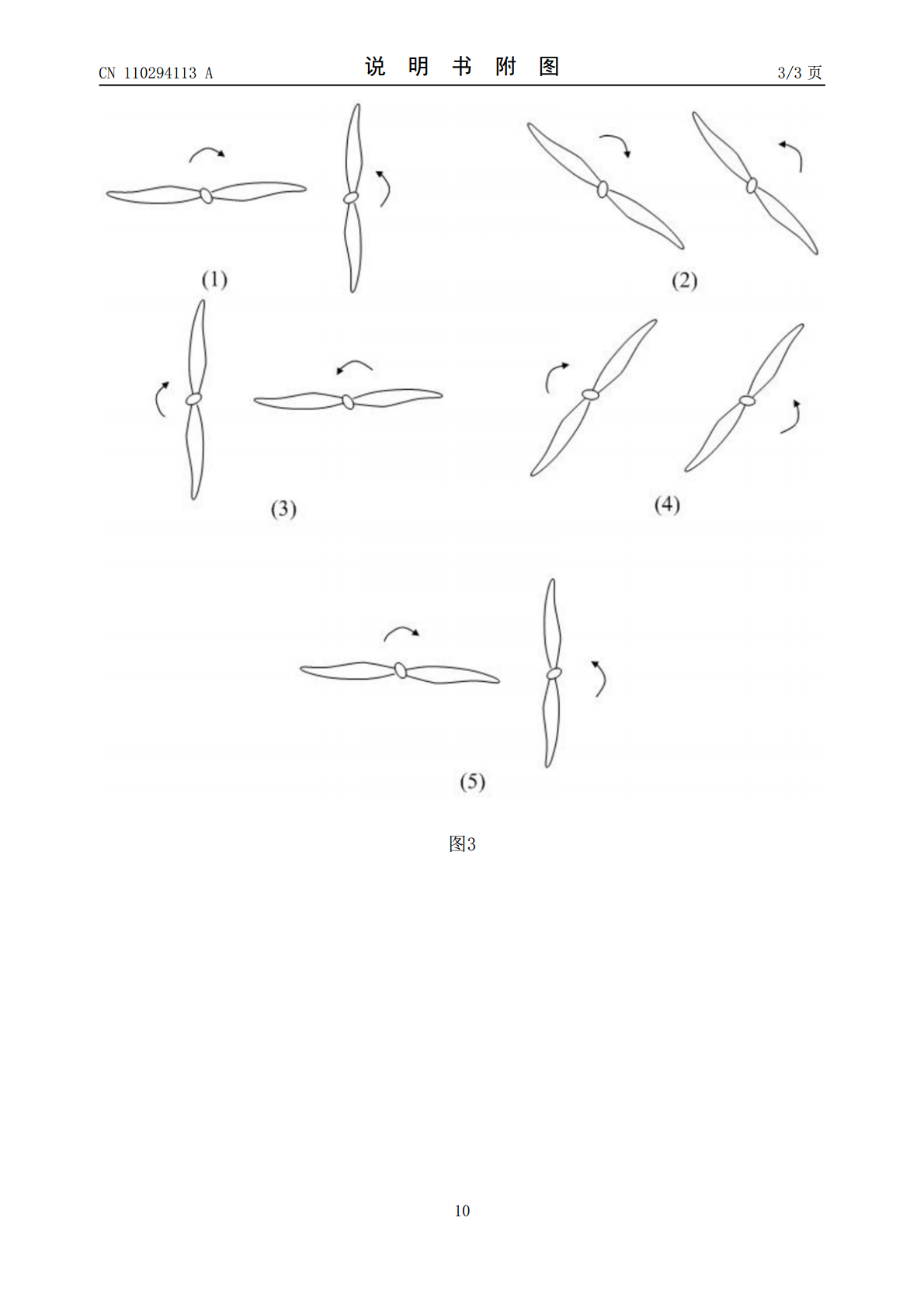
本发明公开了一种油电混合动力多旋翼无人机,包括:起落架(1)、机舱(2)、机臂(3)、飞行控制系统(4)和传感器(5),还包括:大旋翼(6)、小旋翼(7)、燃油发动机(8)、油箱(10)、发电机(11)、锂电池(12)、电功率放大器(13)、齿轮组(9)和皮带(14)。采集后飞行参数输入到飞行控制系统(4)后,由飞行控制系统(4)实现无人机的飞行姿态控制;飞行控制系统(4)控制大旋翼(6)的旋转和小旋翼(7)的旋转;2个大旋翼(6)提供无人机的主要升力,2个大旋翼(6)之间的轴距比大旋翼(6)的直径小。本
油电混合动力旋翼无人机.pdf
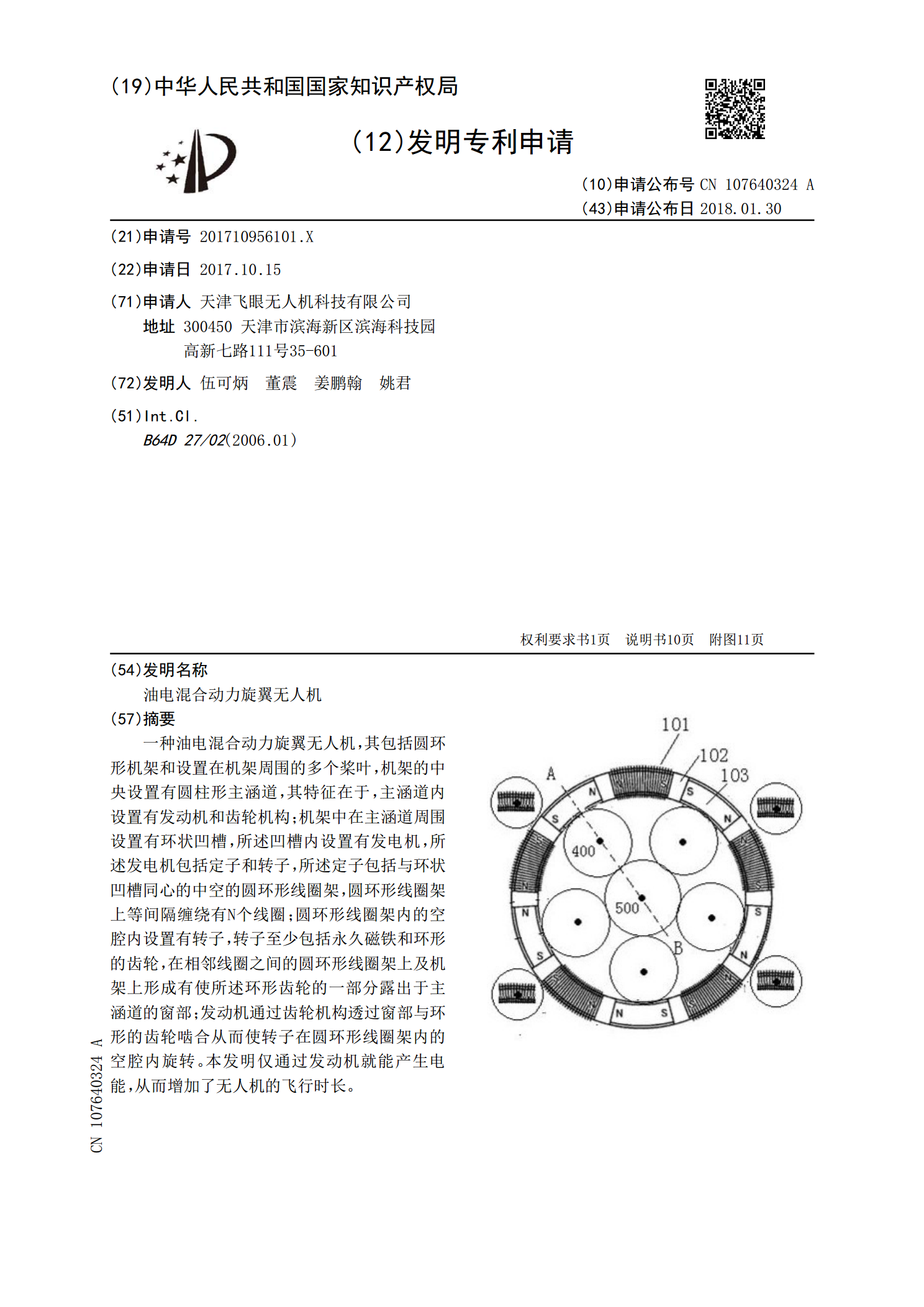
一种油电混合动力旋翼无人机,其包括圆环形机架和设置在机架周围的多个桨叶,机架的中央设置有圆柱形主涵道,其特征在于,主涵道内设置有发动机和齿轮机构;机架中在主涵道周围设置有环状凹槽,所述凹槽内设置有发电机,所述发电机包括定子和转子,所述定子包括与环状凹槽同心的中空的圆环形线圈架,圆环形线圈架上等间隔缠绕有N个线圈;圆环形线圈架内的空腔内设置有转子,转子至少包括永久磁铁和环形的齿轮,在相邻线圈之间的圆环形线圈架上及机架上形成有使所述环形齿轮的一部分露出于主涵道的窗部;发动机通过齿轮机构透过窗部与环形的齿轮啮合
油电混合六旋翼无人机.pdf
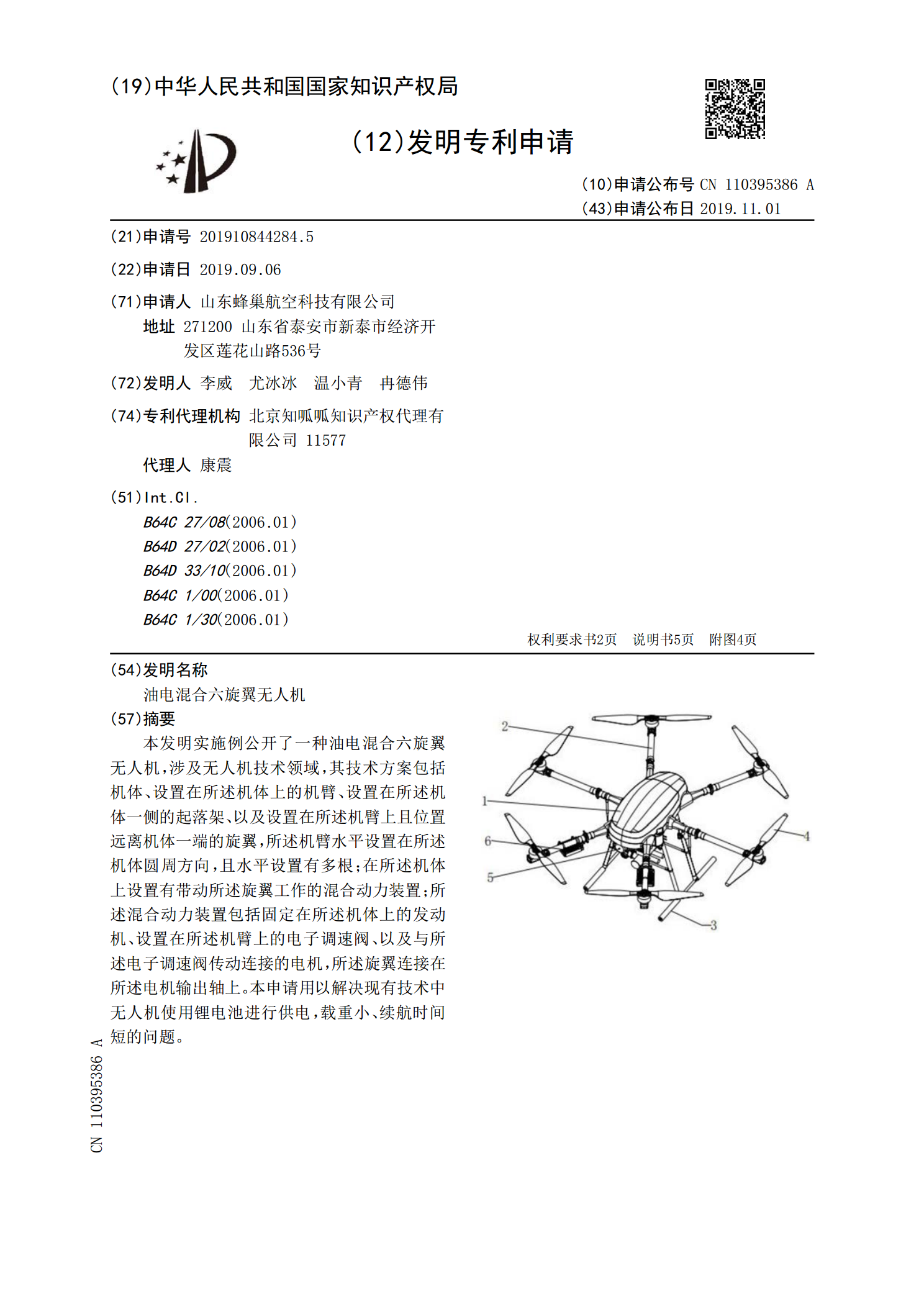
本发明实施例公开了一种油电混合六旋翼无人机,涉及无人机技术领域,其技术方案包括机体、设置在所述机体上的机臂、设置在所述机体一侧的起落架、以及设置在所述机臂上且位置远离机体一端的旋翼,所述机臂水平设置在所述机体圆周方向,且水平设置有多根;在所述机体上设置有带动所述旋翼工作的混合动力装置;所述混合动力装置包括固定在所述机体上的发动机、设置在所述机臂上的电子调速阀、以及与所述电子调速阀传动连接的电机,所述旋翼连接在所述电机输出轴上。本申请用以解决现有技术中无人机使用锂电池进行供电,载重小、续航时间短的问题。
一种油电混合旋翼中继无人机.pdf
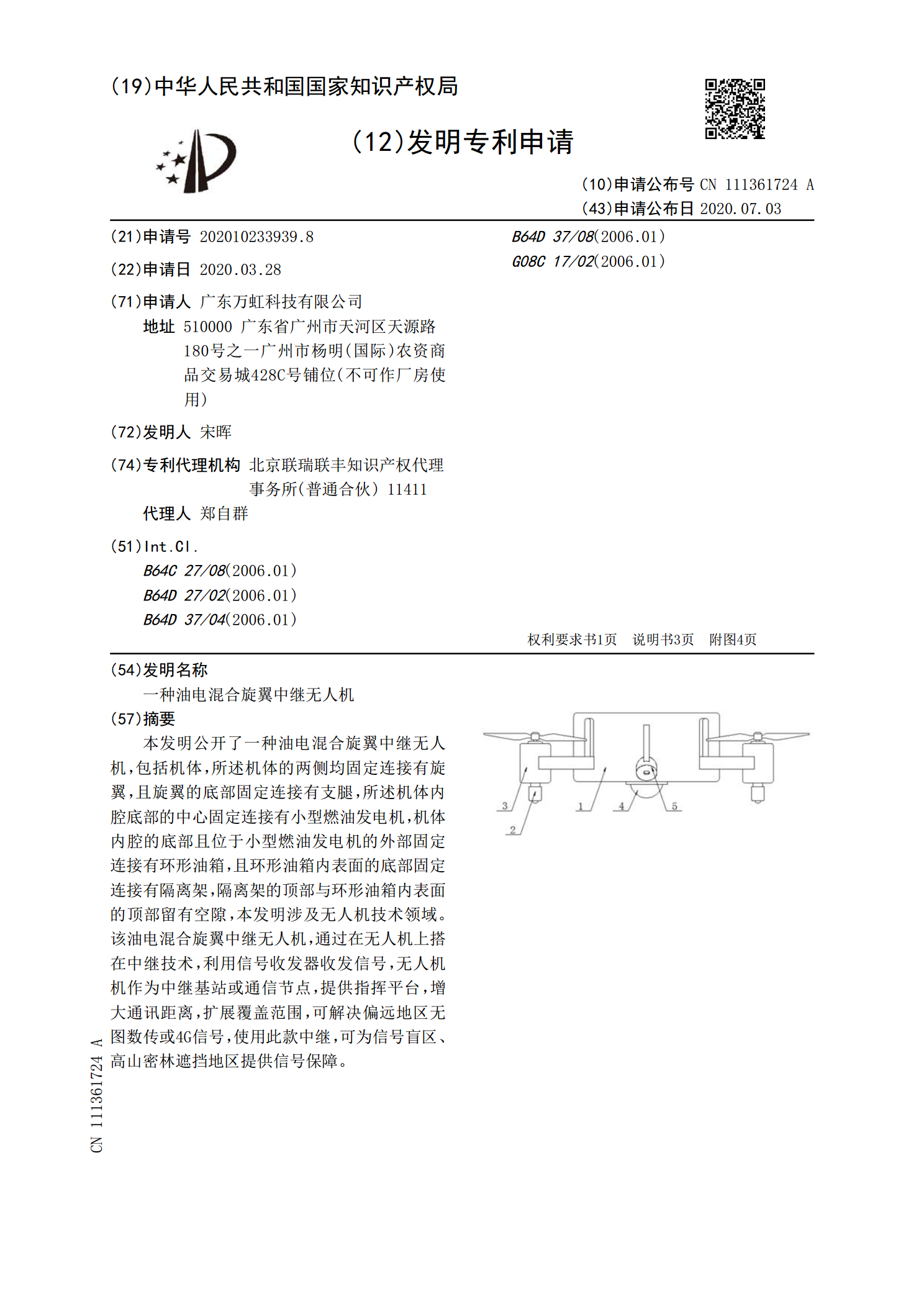
本发明公开了一种油电混合旋翼中继无人机,包括机体,所述机体的两侧均固定连接有旋翼,且旋翼的底部固定连接有支腿,所述机体内腔底部的中心固定连接有小型燃油发电机,机体内腔的底部且位于小型燃油发电机的外部固定连接有环形油箱,且环形油箱内表面的底部固定连接有隔离架,隔离架的顶部与环形油箱内表面的顶部留有空隙,本发明涉及无人机技术领域。该油电混合旋翼中继无人机,通过在无人机上搭在中继技术,利用信号收发器收发信号,无人机机作为中继基站或通信节点,提供指挥平台,增大通讯距离,扩展覆盖范围,可解决偏远地区无图数传或4G信

一种油电混合动力多旋翼飞行器.pdf
本发明涉及一种油电混合动力多旋翼飞行器,属于无人飞行器技术领域。油电混合动力多旋翼飞行器主要由上主旋翼1、下主旋翼2、多旋翼飞行器电控板4、电机驱动副旋翼5、电机6、燃油发动机7、转速对偶齿轮箱8、电池11、风门控制步进电机24构成。该飞行器由主旋翼和副旋翼共同提供飞行动力,主旋翼提供主要升空动力,副旋翼提供小部分升空动力,主旋翼由上主旋翼1和下主旋翼2构成,上主旋翼和下主旋翼具有相同尺寸,转速完全相同,转向相反,实现正反扭矩平衡使得多旋翼飞行器不会在空中发生转动。燃油发动机7固定在机臂16上,主旋翼转轴