
一种消防机器人的全地形轮.pdf

雅云****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种消防机器人的全地形轮.pdf
本发明公开了一种消防机器人的全地形轮,属于消防机器人车轮设计技术领域。本发明包括轮毂、链板和气弹簧,所述链板设有多个,且多个链板之间通过铰接组成链轮;所述链轮通过气弹簧与轮毂相连。本发明通过将全地形轮与地面接触的链轮设计成多块链板铰接而成,且链轮与轮毂之间通过气弹簧进行连接,全地形轮在山区行走时,由于气弹簧的存在,改变全地形轮与地面的接触面积,从而增加全地形轮的抓地性。

一种全地形消防机器人.pdf
本发明公开了一种全地形消防机器人,属于消防设备技术领域。本发明包括车身,以及安装在车身底部的车轮,所述车轮包括轮毂和链轮,且所述轮毂与链轮之间通过气弹簧相连,所述链轮由多个链板铰接而成;所述车身前端顶部安装有消防水炮。本发明通过将消防机器人的车轮设计成一半径可变结构,且与地面相接触的链轮由多块链板铰接而成,行走时提高车轮的抓地性能,从而提高行走速度,使得消防机器人能够及时的到达火灾现场。
一种全地形轮腿式机器人.pdf
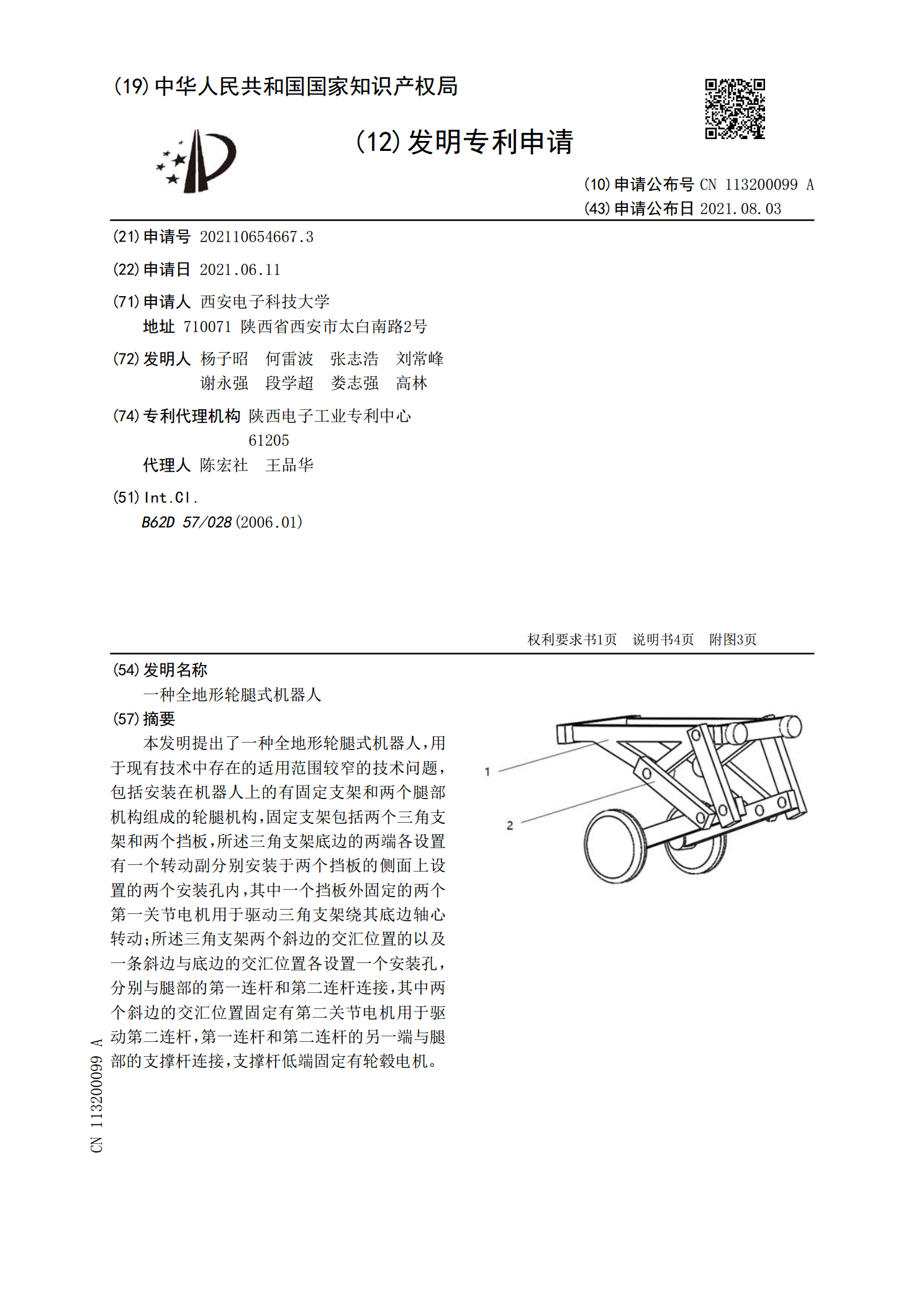
本发明提出了一种全地形轮腿式机器人,用于现有技术中存在的适用范围较窄的技术问题,包括安装在机器人上的有固定支架和两个腿部机构组成的轮腿机构,固定支架包括两个三角支架和两个挡板,所述三角支架底边的两端各设置有一个转动副分别安装于两个挡板的侧面上设置的两个安装孔内,其中一个挡板外固定的两个第一关节电机用于驱动三角支架绕其底边轴心转动;所述三角支架两个斜边的交汇位置的以及一条斜边与底边的交汇位置各设置一个安装孔,分别与腿部的第一连杆和第二连杆连接,其中两个斜边的交汇位置固定有第二关节电机用于驱动第二连杆,第一连

一种轮-履式切换式全地形机器人.pdf
一种轮‑履式切换式全地形机器人,包括四个三角履带轮、驱动系统和模式转换系统;通过步进电机驱动传动轴Ⅰ,使主动齿轮、传动齿轮、从动齿轮、主动齿轮Ⅰ、从动齿轮Ⅰ、主动履带轮及两个从动履带轮产生联动,在较为平缓的地形情况下,以履带模式运行;通过打开模式转换电机驱动锥齿轮副,带动模式转换传动轴,使模式转换齿轮、上齿条、下齿条、传动轴Ⅱ、主动齿轮Ⅱ和从动齿轮Ⅱ产生联动,在复杂地形情况下,以轮式模式运行;四个驱动轮组分别由四台步进电机驱动,通过左右两侧驱动轮组速度差来实现转向;在平坦路面上时,只驱动其中两个步进电机,

一种全地形机器人.pdf
本发明公开了一种全地形机器人,包括机器人本体、驱动装置、控制装置和抬升装置,所述驱动装置为所述机器人本体的动力系统,用于驱动机器人本体;所述控制装置控制机器人本体完成转向、爬坡的动作;所述抬升装置实现机器人本体完成越障的动作;所述驱动装置包括第一舵机、第一固定支架、履带和车轮;所述控制装置包括黑标传感器、触碰传感器和触须传感器;所述抬升装置包括第二舵机和第二固定支架。本发明有效解决了在危险环境、复杂环境和狭窄空间中作业的问题,达到了提高效率、保证安全和节省人力资源的目的。