
一种轮-履式切换式全地形机器人.pdf

小忆****ng

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮-履式切换式全地形机器人.pdf
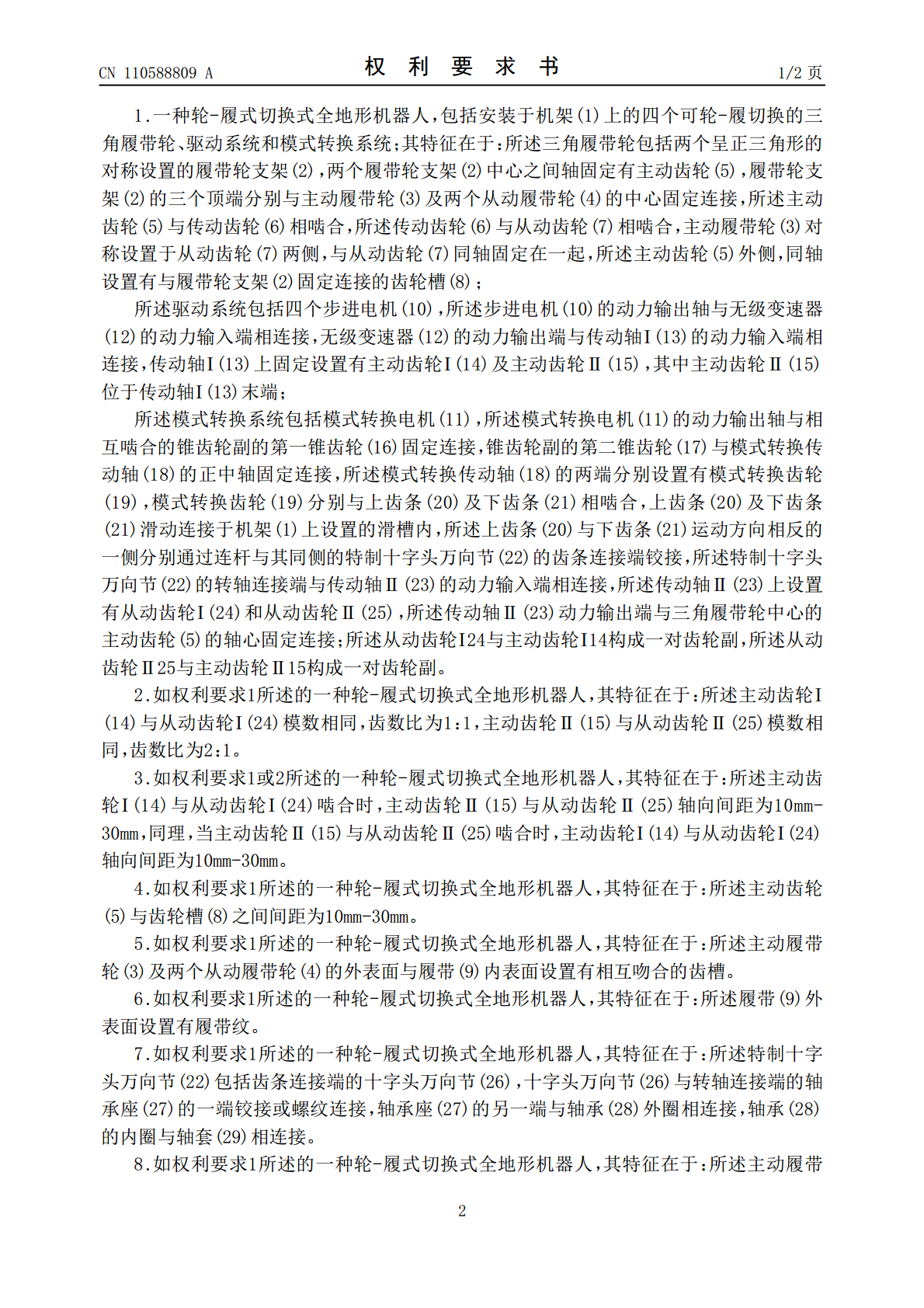
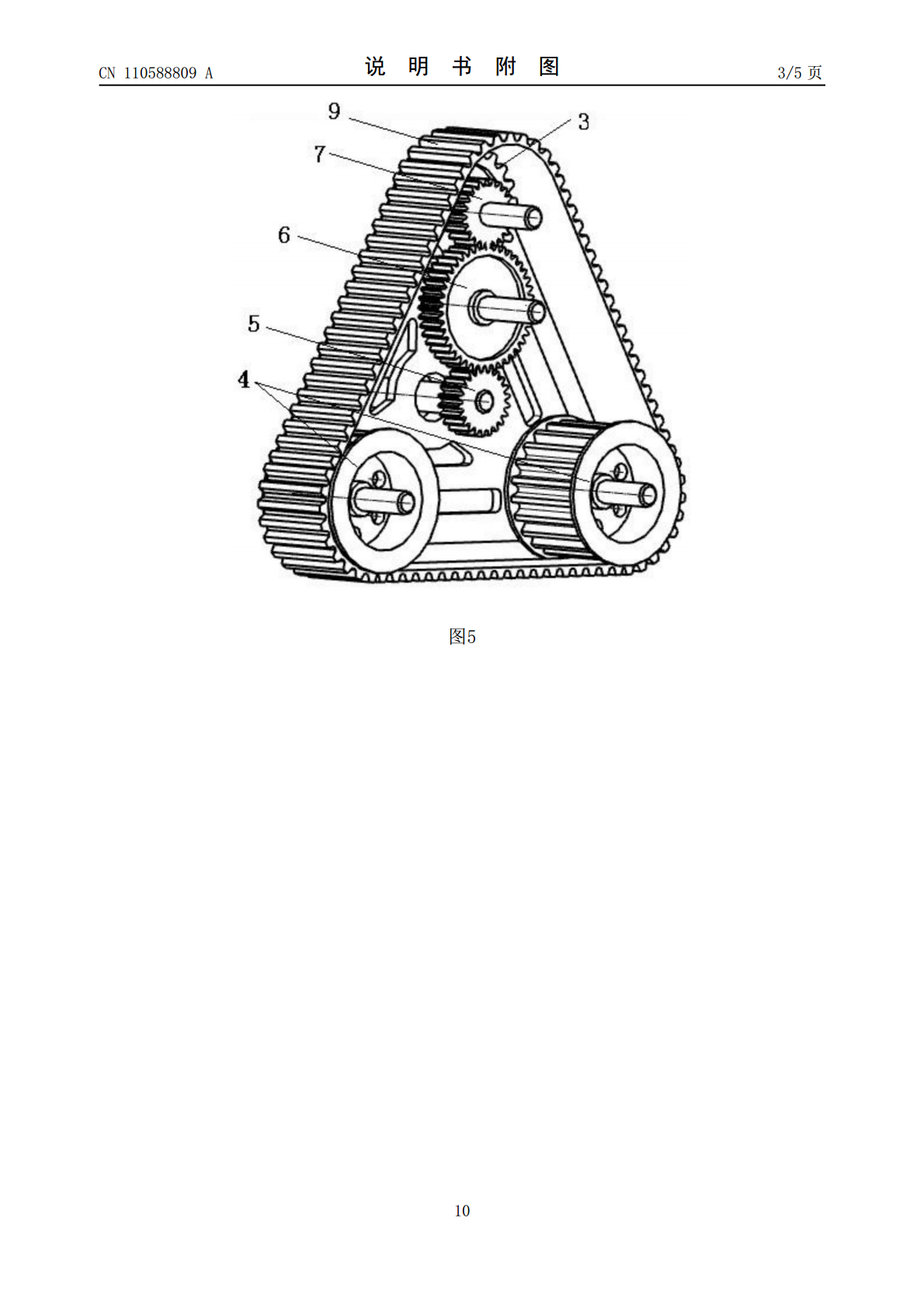
一种轮‑履式切换式全地形机器人,包括四个三角履带轮、驱动系统和模式转换系统;通过步进电机驱动传动轴Ⅰ,使主动齿轮、传动齿轮、从动齿轮、主动齿轮Ⅰ、从动齿轮Ⅰ、主动履带轮及两个从动履带轮产生联动,在较为平缓的地形情况下,以履带模式运行;通过打开模式转换电机驱动锥齿轮副,带动模式转换传动轴,使模式转换齿轮、上齿条、下齿条、传动轴Ⅱ、主动齿轮Ⅱ和从动齿轮Ⅱ产生联动,在复杂地形情况下,以轮式模式运行;四个驱动轮组分别由四台步进电机驱动,通过左右两侧驱动轮组速度差来实现转向;在平坦路面上时,只驱动其中两个步进电机,
一种全地形轮腿式机器人.pdf
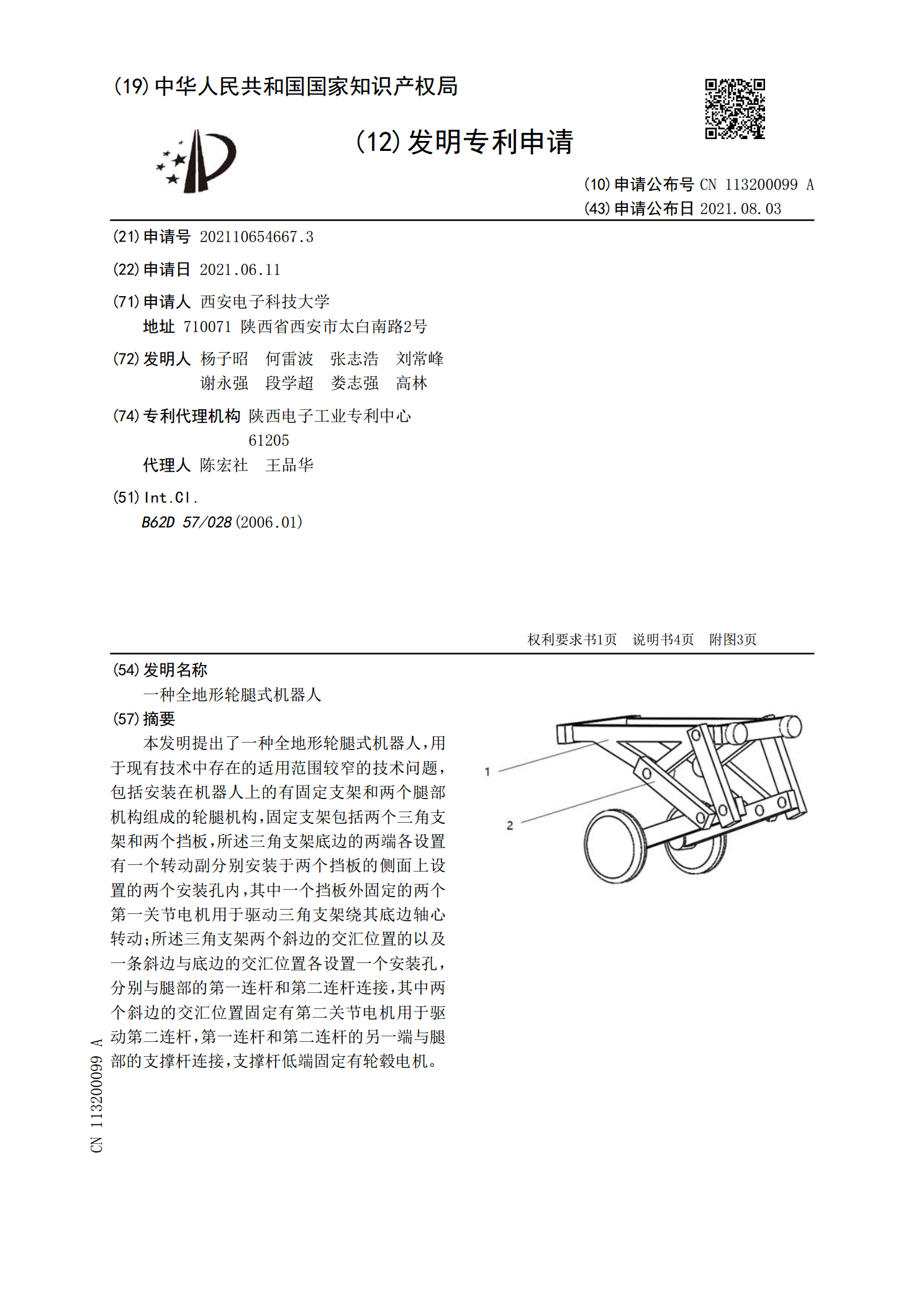
本发明提出了一种全地形轮腿式机器人,用于现有技术中存在的适用范围较窄的技术问题,包括安装在机器人上的有固定支架和两个腿部机构组成的轮腿机构,固定支架包括两个三角支架和两个挡板,所述三角支架底边的两端各设置有一个转动副分别安装于两个挡板的侧面上设置的两个安装孔内,其中一个挡板外固定的两个第一关节电机用于驱动三角支架绕其底边轴心转动;所述三角支架两个斜边的交汇位置的以及一条斜边与底边的交汇位置各设置一个安装孔,分别与腿部的第一连杆和第二连杆连接,其中两个斜边的交汇位置固定有第二关节电机用于驱动第二连杆,第一连
一种轮履切换式轮椅.pdf
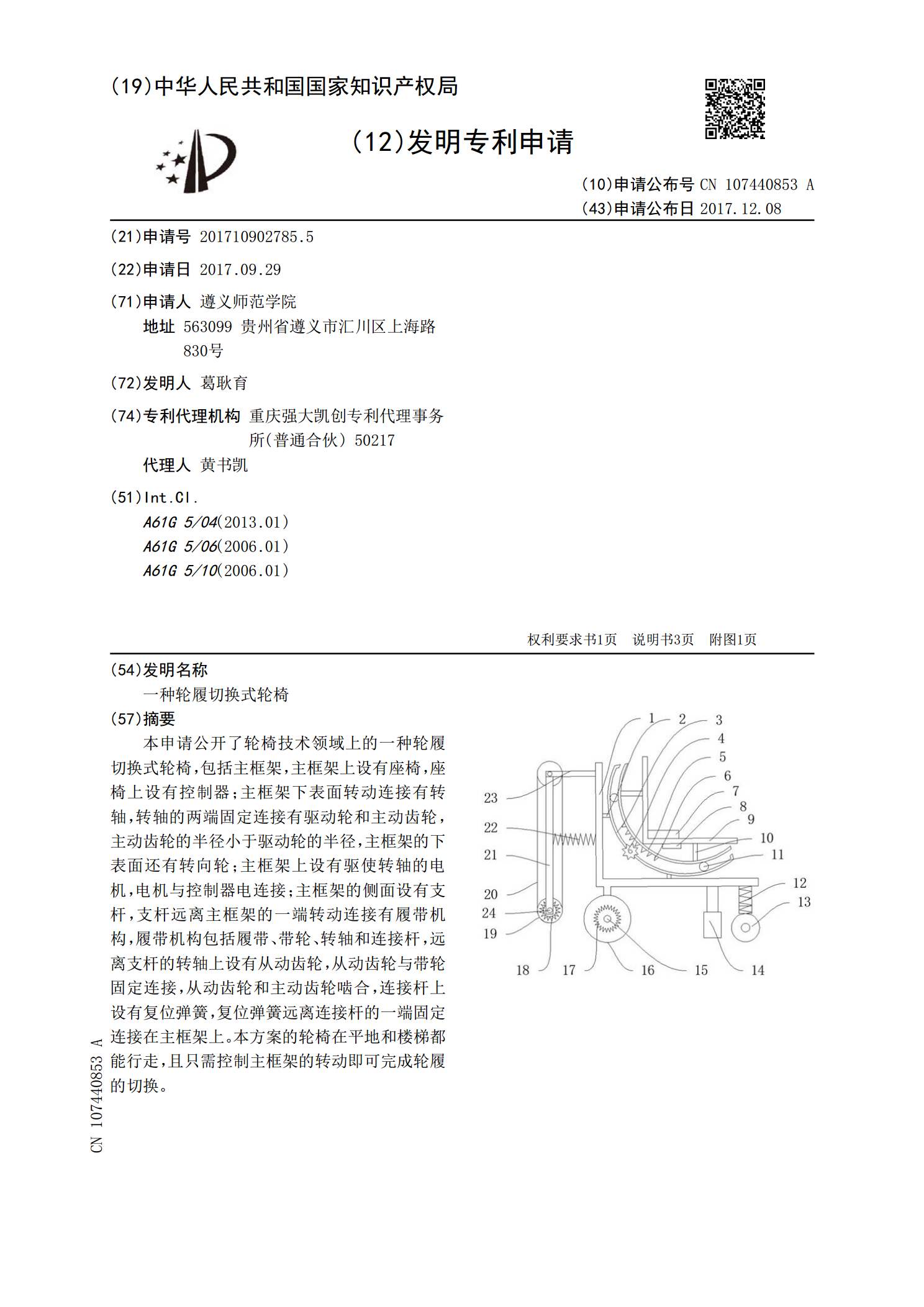
本申请公开了轮椅技术领域上的一种轮履切换式轮椅,包括主框架,主框架上设有座椅,座椅上设有控制器;主框架下表面转动连接有转轴,转轴的两端固定连接有驱动轮和主动齿轮,主动齿轮的半径小于驱动轮的半径,主框架的下表面还有转向轮;主框架上设有驱使转轴的电机,电机与控制器电连接;主框架的侧面设有支杆,支杆远离主框架的一端转动连接有履带机构,履带机构包括履带、带轮、转轴和连接杆,远离支杆的转轴上设有从动齿轮,从动齿轮与带轮固定连接,从动齿轮和主动齿轮啮合,连接杆上设有复位弹簧,复位弹簧远离连接杆的一端固定连接在主框架上

一种轮足切换式机器人.pdf
本发明公开一种轮足切换式机器人,包括躯干、两套机械腿机构、轮式机构及锁定机构,通过设置锁定机构,在机械腿机构处于收缩状态时,将对两套机械腿机构施加锁定力,使两套机械腿机构保持在收缩状态,并至少高于所述轮式机构的主动轮,此时无需机械腿机构中的电机组运转,即可卸载掉电机组内电机的转矩,主动轮着地受驱动机构的驱动而进行滚动行走;相反,当需要机械腿机构进行行走时,锁定机构就撤销对机械腿机构的锁定力,在电机组的运转下,使机械腿机构处于伸展状态并行走,而轮式机构被抬高悬空在躯干上,电机组仅在机械腿行走及由伸展状态切换
一种四轮腿式全地形农业机器人.pdf
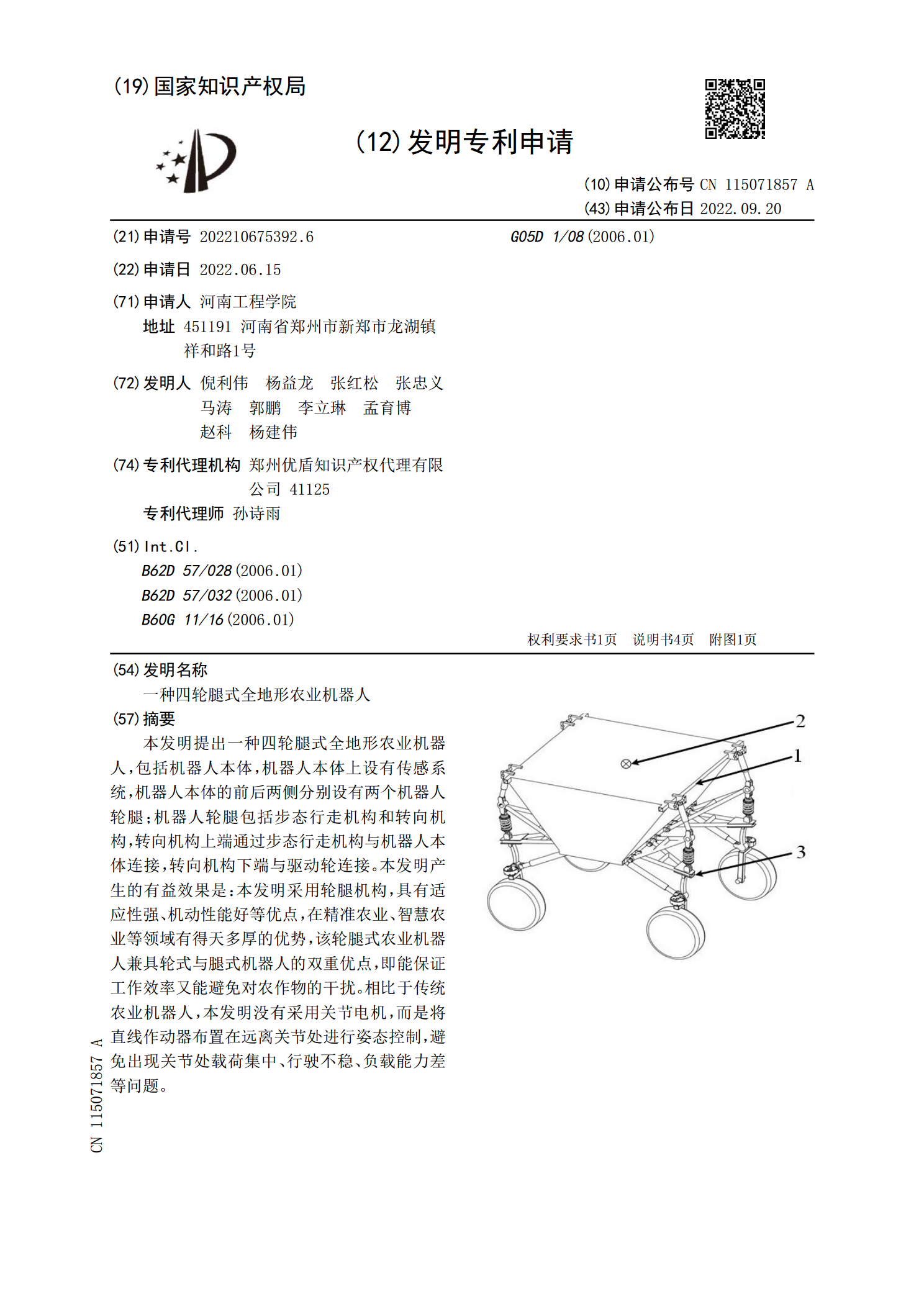
本发明提出一种四轮腿式全地形农业机器人,包括机器人本体,机器人本体上设有传感系统,机器人本体的前后两侧分别设有两个机器人轮腿;机器人轮腿包括步态行走机构和转向机构,转向机构上端通过步态行走机构与机器人本体连接,转向机构下端与驱动轮连接。本发明产生的有益效果是:本发明采用轮腿机构,具有适应性强、机动性能好等优点,在精准农业、智慧农业等领域有得天多厚的优势,该轮腿式农业机器人兼具轮式与腿式机器人的双重优点,即能保证工作效率又能避免对农作物的干扰。相比于传统农业机器人,本发明没有采用关节电机,而是将直线作动器布