
一种基于扩张干扰观测器的线控转向系统齿条力估计方法.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于扩张干扰观测器的线控转向系统齿条力估计方法.pdf
本发明公开了一种基于扩张干扰观测器的线控转向系统齿条力估计方法,涉及电动汽车线控转向领域。本发明用广义齿条力表达路面反馈信息,将其定义为由轮胎自回正力矩产生的狭义齿条力、参数不确定性以及模型不确定性的总和;线控转向系统动力学模型建模后,设计扩张干扰观测器,实现严苛工况的实时齿条力评估,对比其他方法具有更加精准,实时性好的优点。

转向系统的齿条力估计.pdf
根据本文描述的技术方案的一个或多个实施例,一种用于在转向系统中产生扭矩的方法包括通过控制器使用车辆模型计算车辆的横向速度,该车辆模型使用车辆速度、表面摩擦估计、轮胎角度,以及横向加速度和来自横摆角速度传感器的所测量的横摆角速度二者中的至少一个。该方法还包括通过控制器产生用于向驾驶员提供辅助扭矩的扭矩指令,扭矩指令基于计算出的横向速度。该方法还包括通过电动机提供辅助扭矩,该辅助扭矩是对应于扭矩指令的扭矩量。

电动转向中解耦转向齿条力干扰的系统和方法.pdf
一种在电动转向中解耦转向齿条力干扰的系统,可以包含方向盘转角传感器、偏航率传感器、横向加速度传感器以及转向扭矩传感器。该系统还可以包含设置成从方向盘转角传感器、偏航率传感器和横向加速度传感器接收信号并将参考齿条力发送到控制器的轮胎力发生器。该系统可以进一步包含设置成从转向扭矩传感器接收信号并将估计齿条力发送到控制器的齿条力观测器,其中控制器设置成从轮胎力发生器和齿条力观测器接收信号,将估计齿条力与参考齿条力进行比较从而确定齿条力干扰,并且基于齿条力干扰调整辅助扭矩。

一种基于参数估计的线控转向控制系统及控制方法.pdf
本发明公开了一种基于参数估计的线控转向控制系统及控制方法。该系统包括方向盘及其连接机构、方向盘转角传感器、方向盘转矩传感器、路感电机、路感电机电流传感器、转向电机、转向电机电流传感器、车速传感器、前轮转角传感器、齿轮齿条转向器、位置传感器、转向电子控制单元、传感器信号整合模块以及电机电流控制模块。本发明运用粒子滤波器对汽车运动的姿态进行滤波预测估计,粒子滤波器通过电子传感器获得信号,进而运用粒子滤波估计算法得到汽车的运动参数。本发明所公开的系统的转向控制器能够在保证转向稳定的前提下,有效地减少外界随机干扰
线控转向系统和线控转向系统的控制方法.pdf
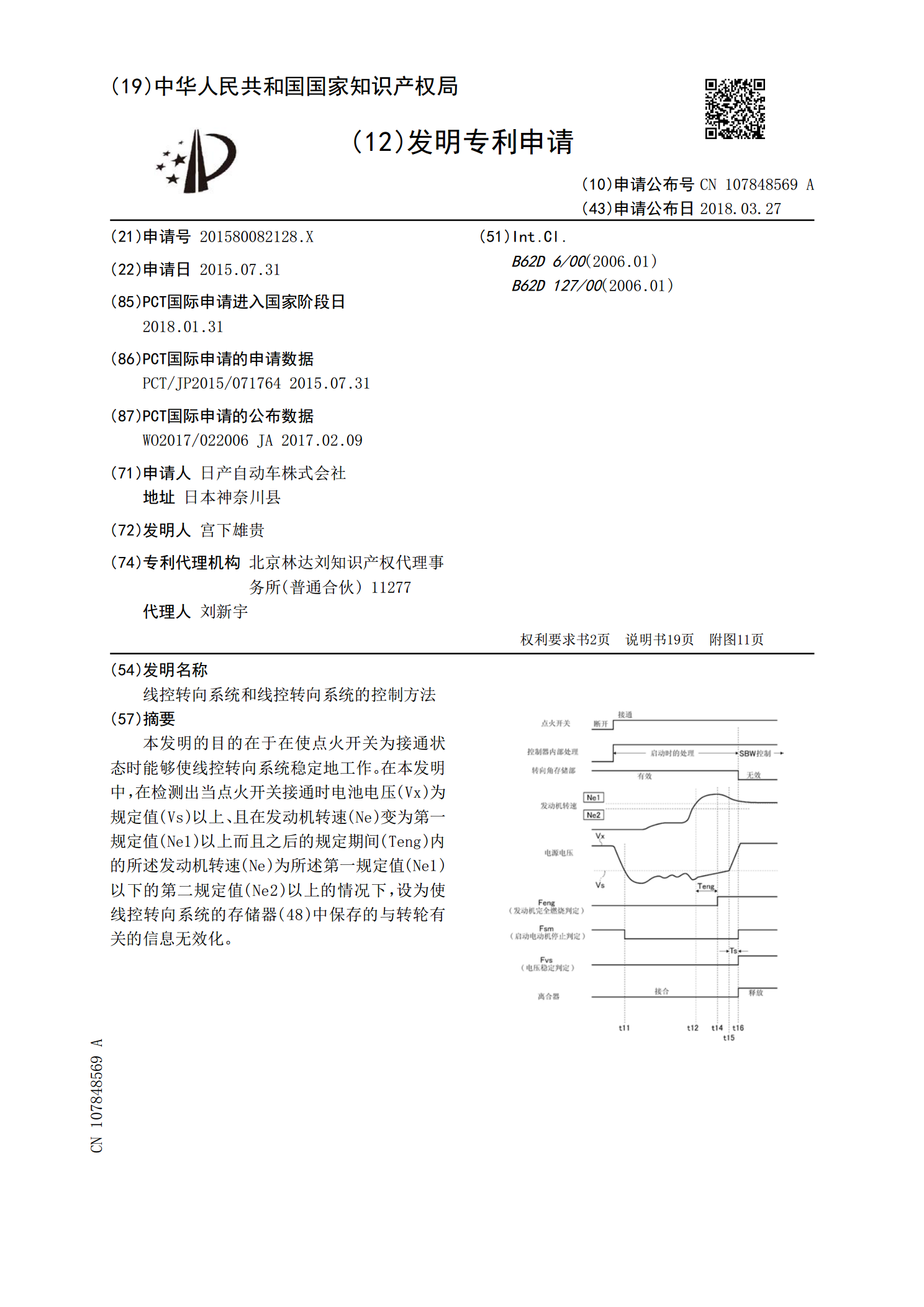
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。