
一种6D位姿估计数据集制作方法、装置、终端及介质.pdf

元枫****文章

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种6D位姿估计数据集制作方法、装置、终端及介质.pdf
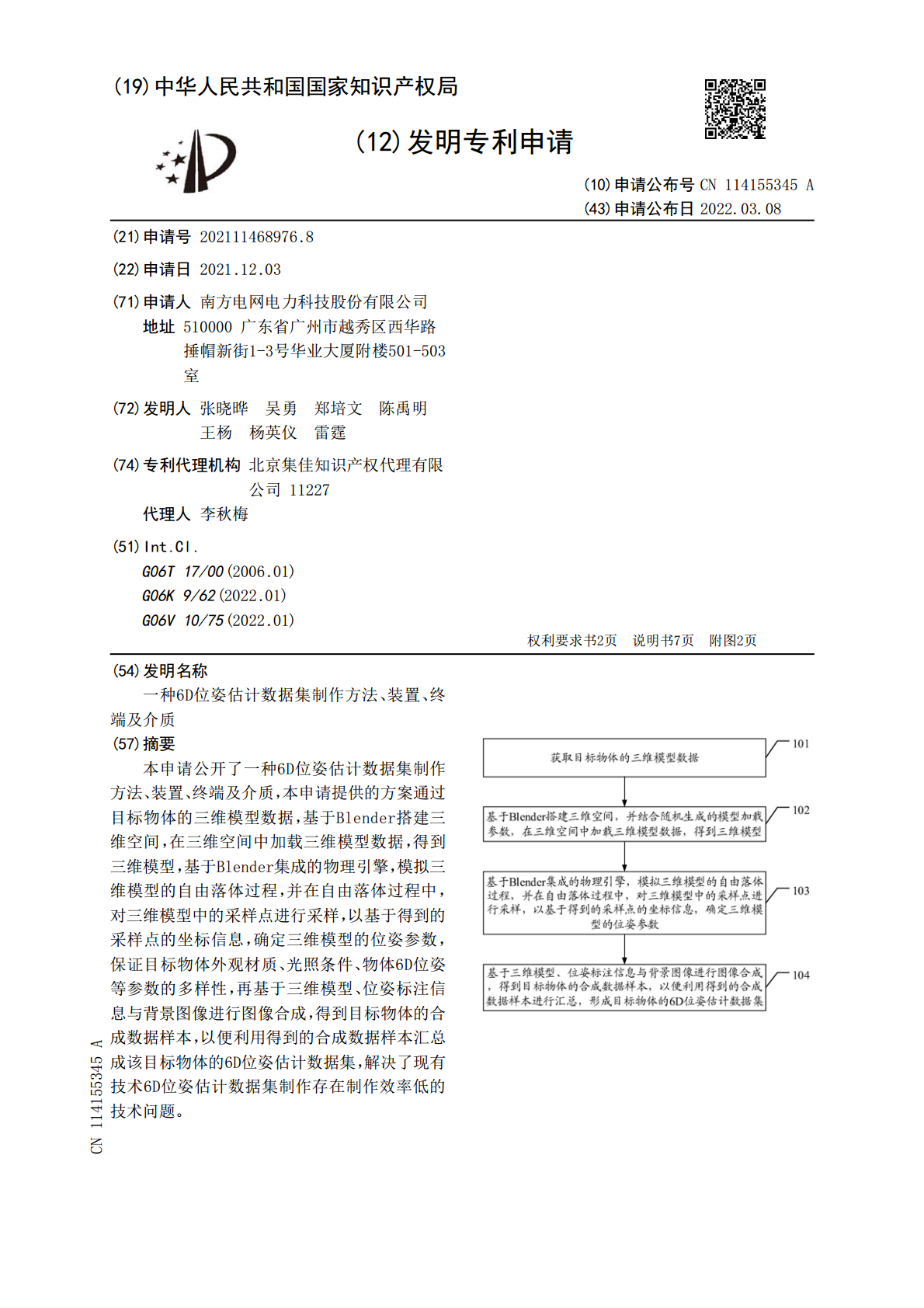
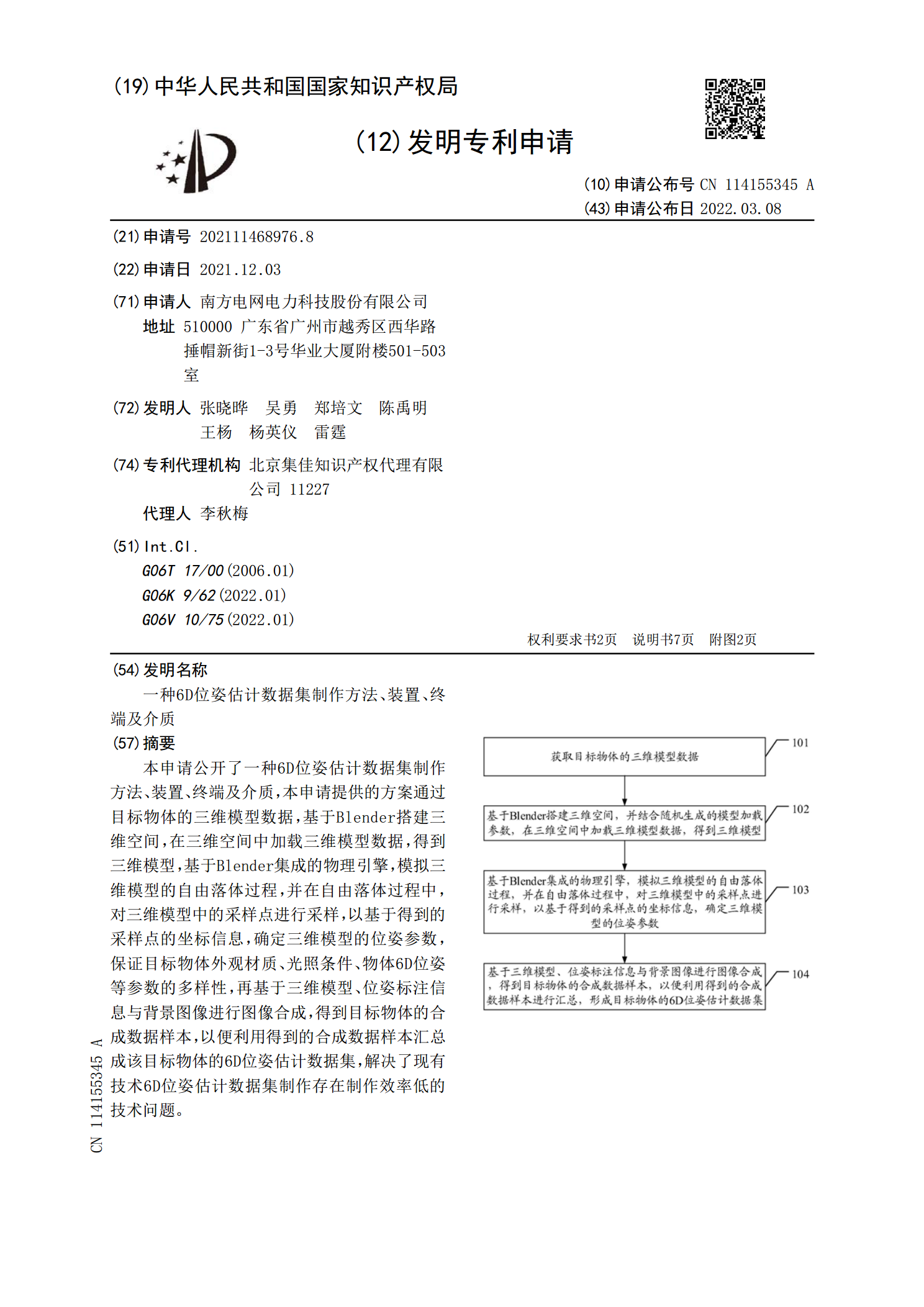
本申请公开了一种6D位姿估计数据集制作方法、装置、终端及介质,本申请提供的方案通过目标物体的三维模型数据,基于Blender搭建三维空间,在三维空间中加载三维模型数据,得到三维模型,基于Blender集成的物理引擎,模拟三维模型的自由落体过程,并在自由落体过程中,对三维模型中的采样点进行采样,以基于得到的采样点的坐标信息,确定三维模型的位姿参数,保证目标物体外观材质、光照条件、物体6D位姿等参数的多样性,再基于三维模型、位姿标注信息与背景图像进行图像合成,得到目标物体的合成数据样本,以便利用得到的合成数据
位姿估计方法、装置、设备及介质.pdf
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的轮速计观测数据;根据预设轮速计模型和车辆运动学模型,获取轮速计观测数据表征的车辆名义状态的时间导数;对轮速计观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义位姿增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的轮速计误差置信度;根据指定传感器在T时刻观测数据和T+1时刻观测数据、轮速计观测数据对应的名义位
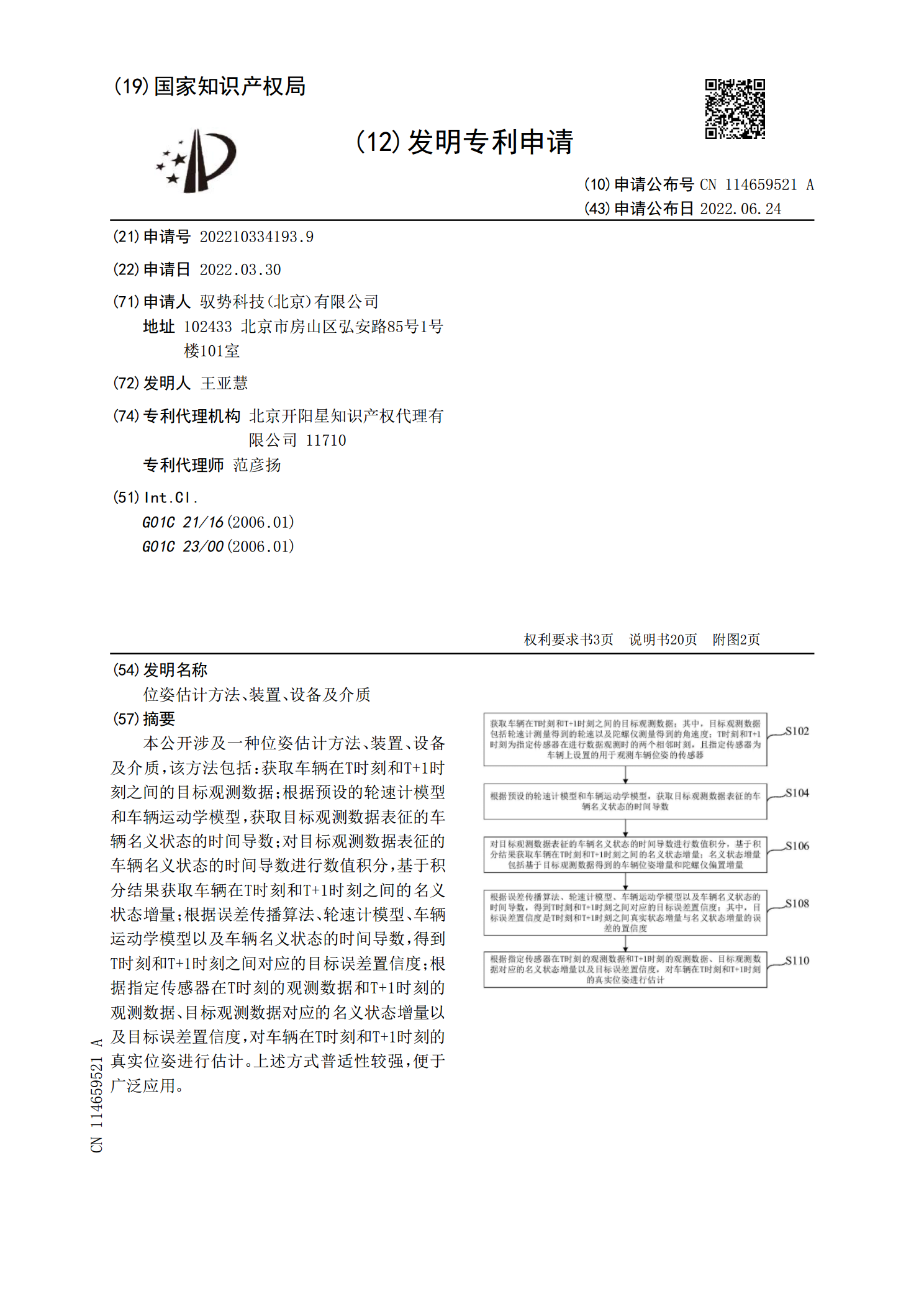
位姿估计方法、装置、设备及介质.pdf
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的目标观测数据;根据预设的轮速计模型和车辆运动学模型,获取目标观测数据表征的车辆名义状态的时间导数;对目标观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义状态增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的目标误差置信度;根据指定传感器在T时刻的观测数据和T+1时刻的观测数据、目标观测数据对应的名义状态增

一种利用轮廓信息的6D位姿估计方法.pdf
本发明提供了一种利用轮廓信息的6D位姿估计方法,包括:基于卷积神经网络设计目标物体6D位姿估计网络;采集和标注不同背景、角度和姿态的目标物体训练样本图片构建数据集,并对训练样本进行数据增强;对目标物体6D位姿估计网络进行训练,得到网络参数模型;调用目标物体6D位姿估计网络参数模型对目标物体图片进行预测,得到目标物体关键点二维投影坐标;由目标物体关键点二维投影坐标,利用EPnP计算出目标物体6D位姿。本发明方法在不需要位姿修正后处理的情况下,通过所设计的6D位姿估计网络,利用目标物体的轮廓信息快速准确地检测
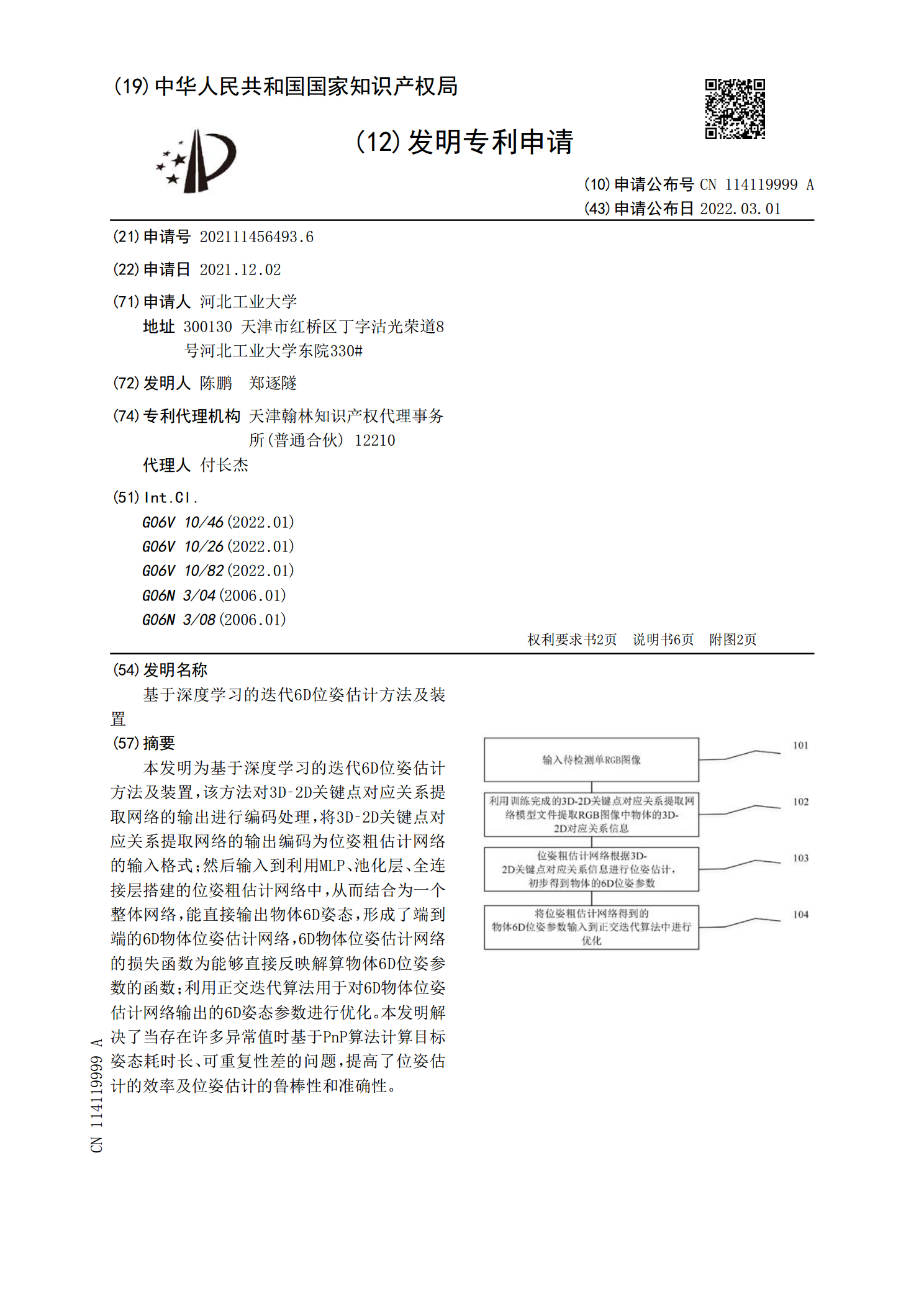
基于深度学习的迭代6D位姿估计方法及装置.pdf
本发明为基于深度学习的迭代6D位姿估计方法及装置,该方法对3D‑2D关键点对应关系提取网络的输出进行编码处理,将3D‑2D关键点对应关系提取网络的输出编码为位姿粗估计网络的输入格式;然后输入到利用MLP、池化层、全连接层搭建的位姿粗估计网络中,从而结合为一个整体网络,能直接输出物体6D姿态,形成了端到端的6D物体位姿估计网络,6D物体位姿估计网络的损失函数为能够直接反映解算物体6D位姿参数的函数;利用正交迭代算法用于对6D物体位姿估计网络输出的6D姿态参数进行优化。本发明解决了当存在许多异常值时基于PnP