
一种基于人工智能的机械臂.pdf

是翠****ng

1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于人工智能的机械臂.pdf
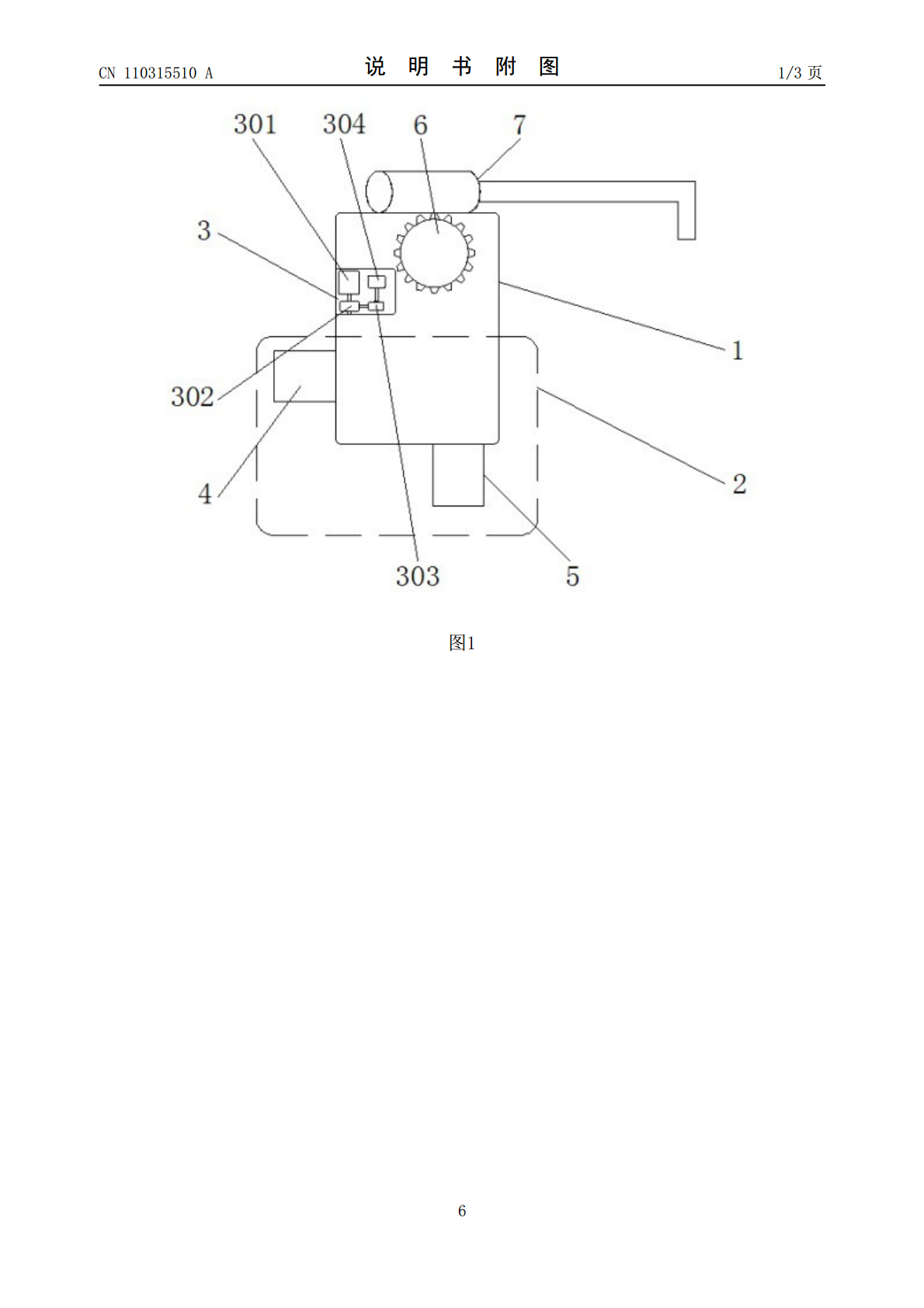
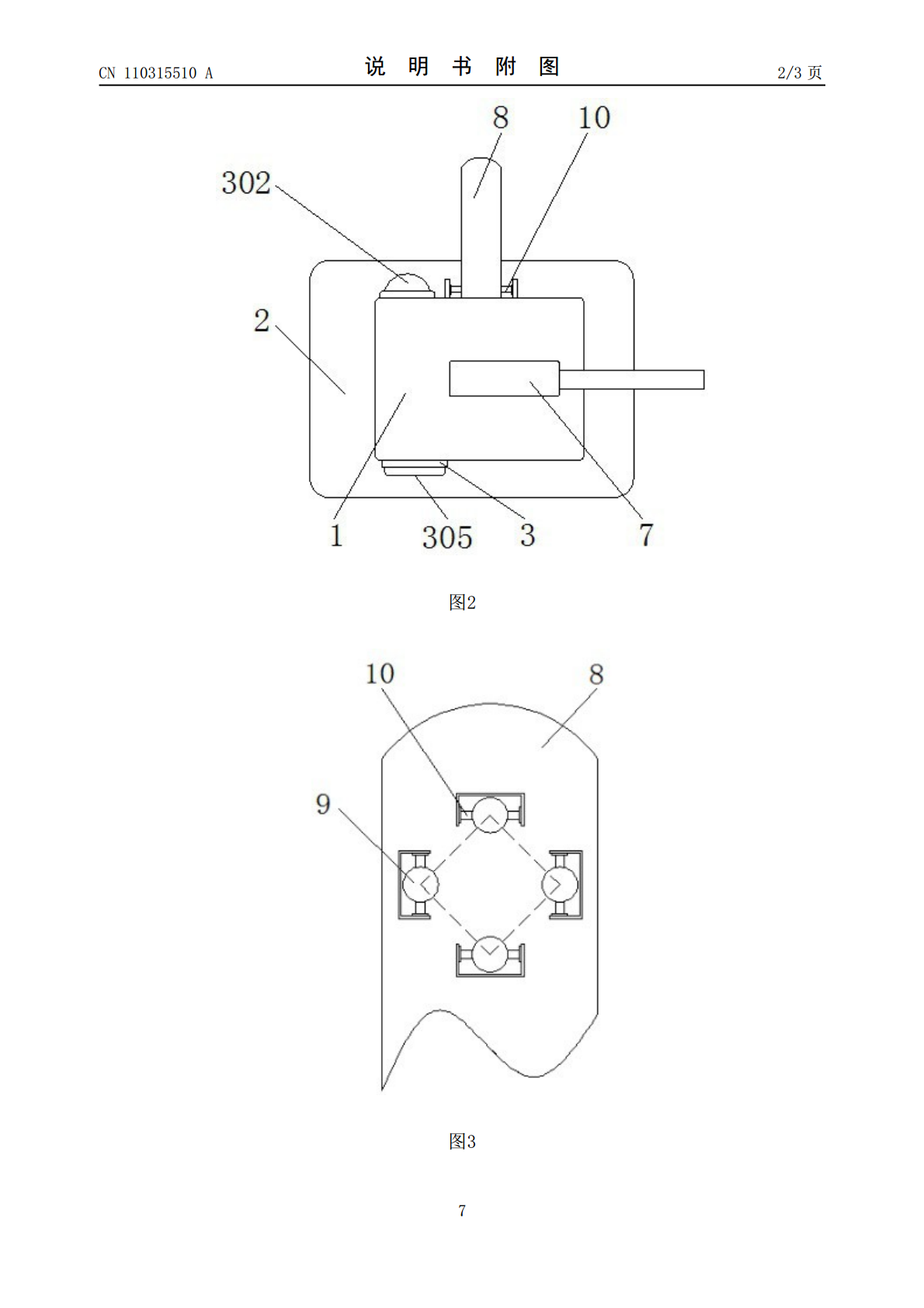
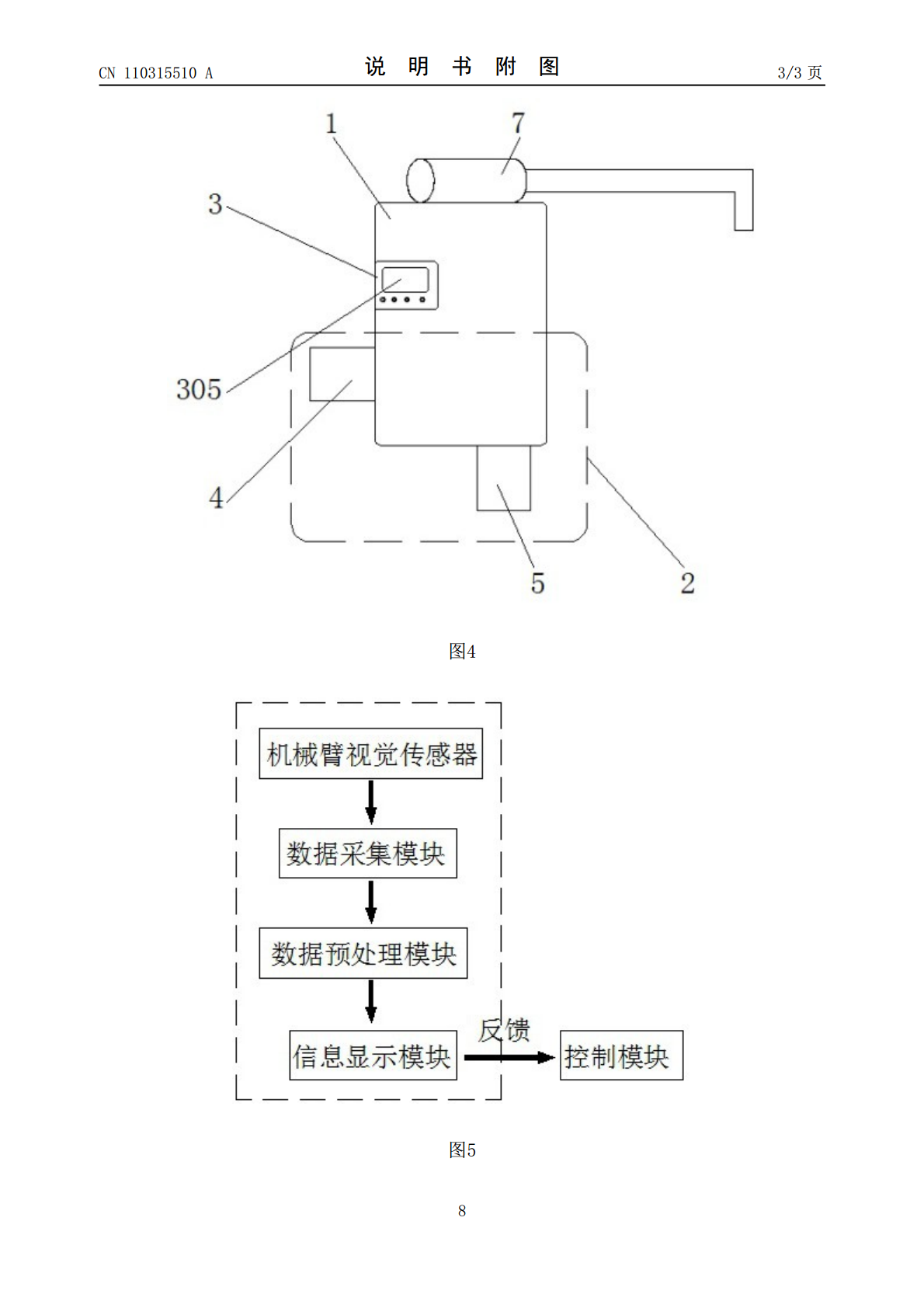
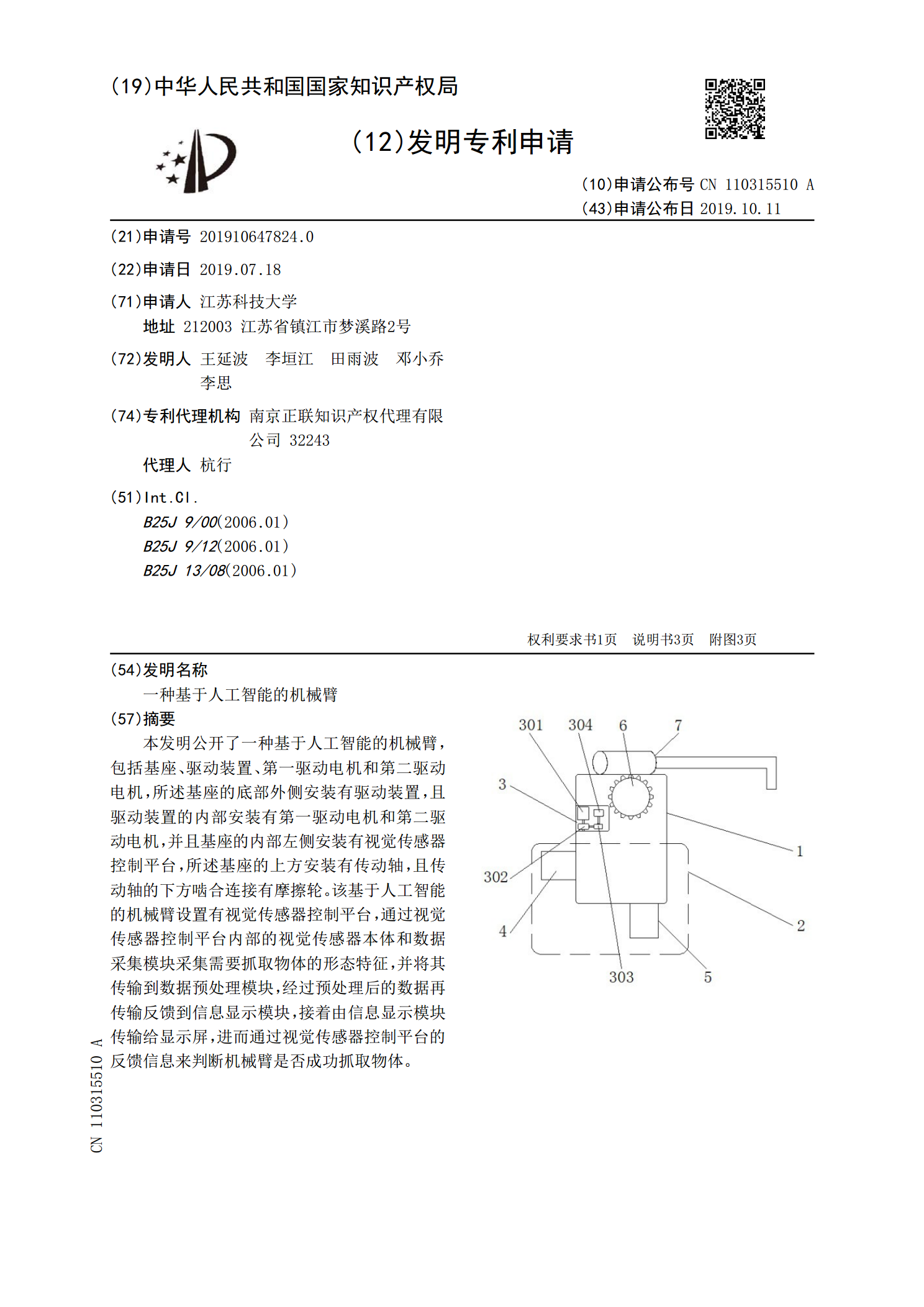
本发明公开了一种基于人工智能的机械臂,包括基座、驱动装置、第一驱动电机和第二驱动电机,所述基座的底部外侧安装有驱动装置,且驱动装置的内部安装有第一驱动电机和第二驱动电机,并且基座的内部左侧安装有视觉传感器控制平台,所述基座的上方安装有传动轴,且传动轴的下方啮合连接有摩擦轮。该基于人工智能的机械臂设置有视觉传感器控制平台,通过视觉传感器控制平台内部的视觉传感器本体和数据采集模块采集需要抓取物体的形态特征,并将其传输到数据预处理模块,经过预处理后的数据再传输反馈到信息显示模块,接着由信息显示模块传输给显示屏,

一种人工智能机械臂用柔性机构.pdf
本发明公开了一种人工智能机械臂用柔性机构,包括底座、电机和臂体,所述底座的上端开设有活动槽,且活动槽内连接有安装座,所述电机固定于安装座底部的内侧,且电机的输出端连接有齿轮,所述安装座内预留有导槽,且导槽内安装有导环,并且导环的外侧固定有卡块,所述导环内连接有导杆,且导杆的顶部安装有固定座,并且固定座的顶部紧固连接有臂体,所述安装座的顶部边缘处安装有底杆,且底杆内开设有伸缩槽,所述伸缩槽内通过弹簧固定连接有顶杆,且顶杆的顶端与固定座的外侧相连接。该人工智能机械臂用安装基座,可以对固定安装后的机械臂进行横向
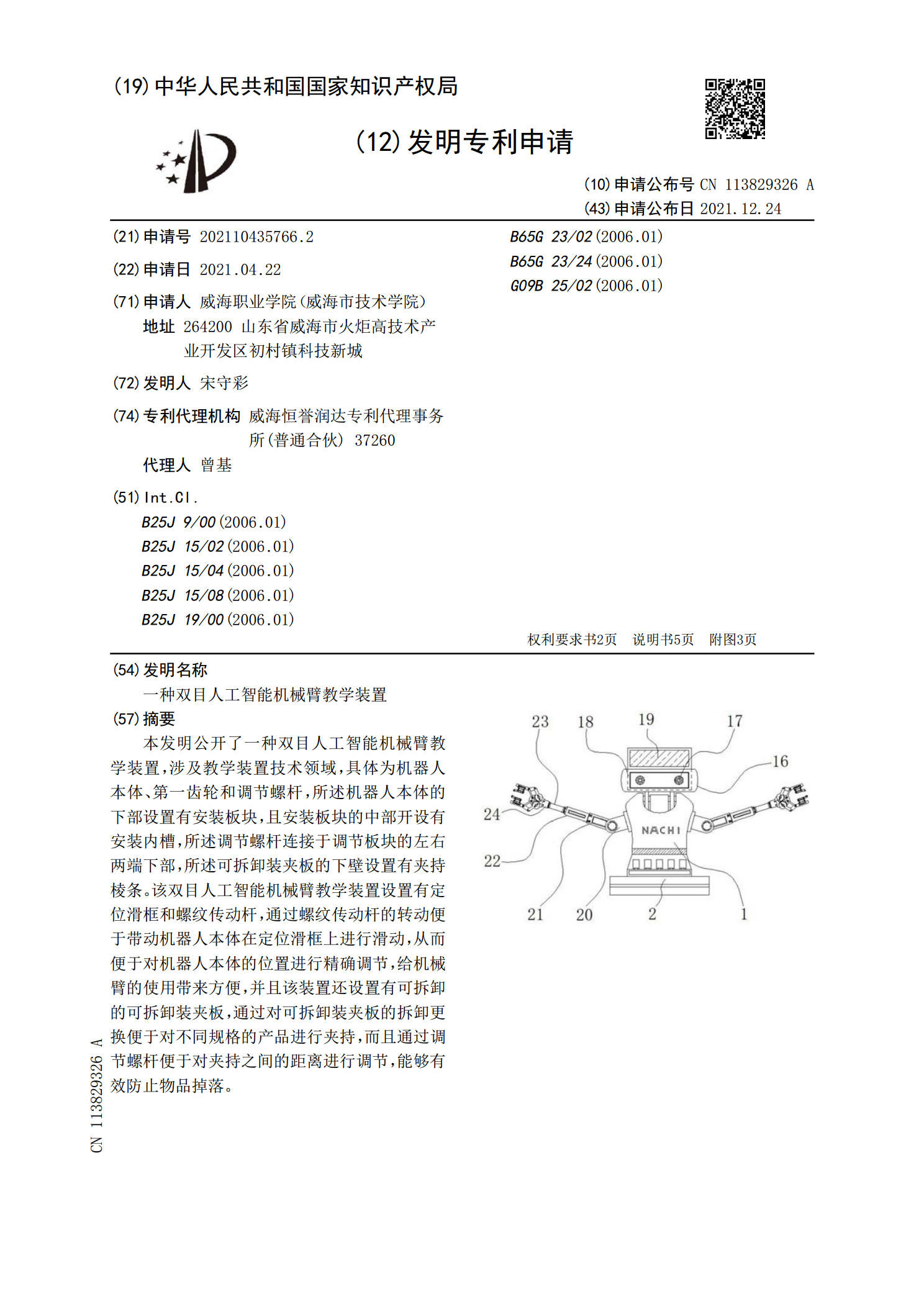
一种双目人工智能机械臂教学装置.pdf
本发明公开了一种双目人工智能机械臂教学装置,涉及教学装置技术领域,具体为机器人本体、第一齿轮和调节螺杆,所述机器人本体的下部设置有安装板块,且安装板块的中部开设有安装内槽,所述调节螺杆连接于调节板块的左右两端下部,所述可拆卸装夹板的下壁设置有夹持棱条。该双目人工智能机械臂教学装置设置有定位滑框和螺纹传动杆,通过螺纹传动杆的转动便于带动机器人本体在定位滑框上进行滑动,从而便于对机器人本体的位置进行精确调节,给机械臂的使用带来方便,并且该装置还设置有可拆卸的可拆卸装夹板,通过对可拆卸装夹板的拆卸更换便于对不同

一种人工智能机械臂防尘保护装置.pdf
本发明公开了一种人工智能机械臂防尘保护装置,包括箱体、正极板、竖板、负极板和电动伸缩杆,所述箱体的内部左端穿插有手柄,且手柄的顶部位于箱体的上方,所述箱体的上表面贴合有顶板,所述外壳的内部设置有圆盘,且圆盘的后端表面焊接有连接杆,所述外壳的底端连接有固定板,所述竖板连接在连接板的下表面,所述正极板的下方设置有同样和竖板连接的负极板,所述正极板和负极板之间设置有载板,所述载板的上方设置有清洁板,所述载板的下表面连接有支腿,且支腿的内部穿插有螺纹杆。该人工智能机械臂防尘保护装置,便于防尘,同时便于对表面已经积
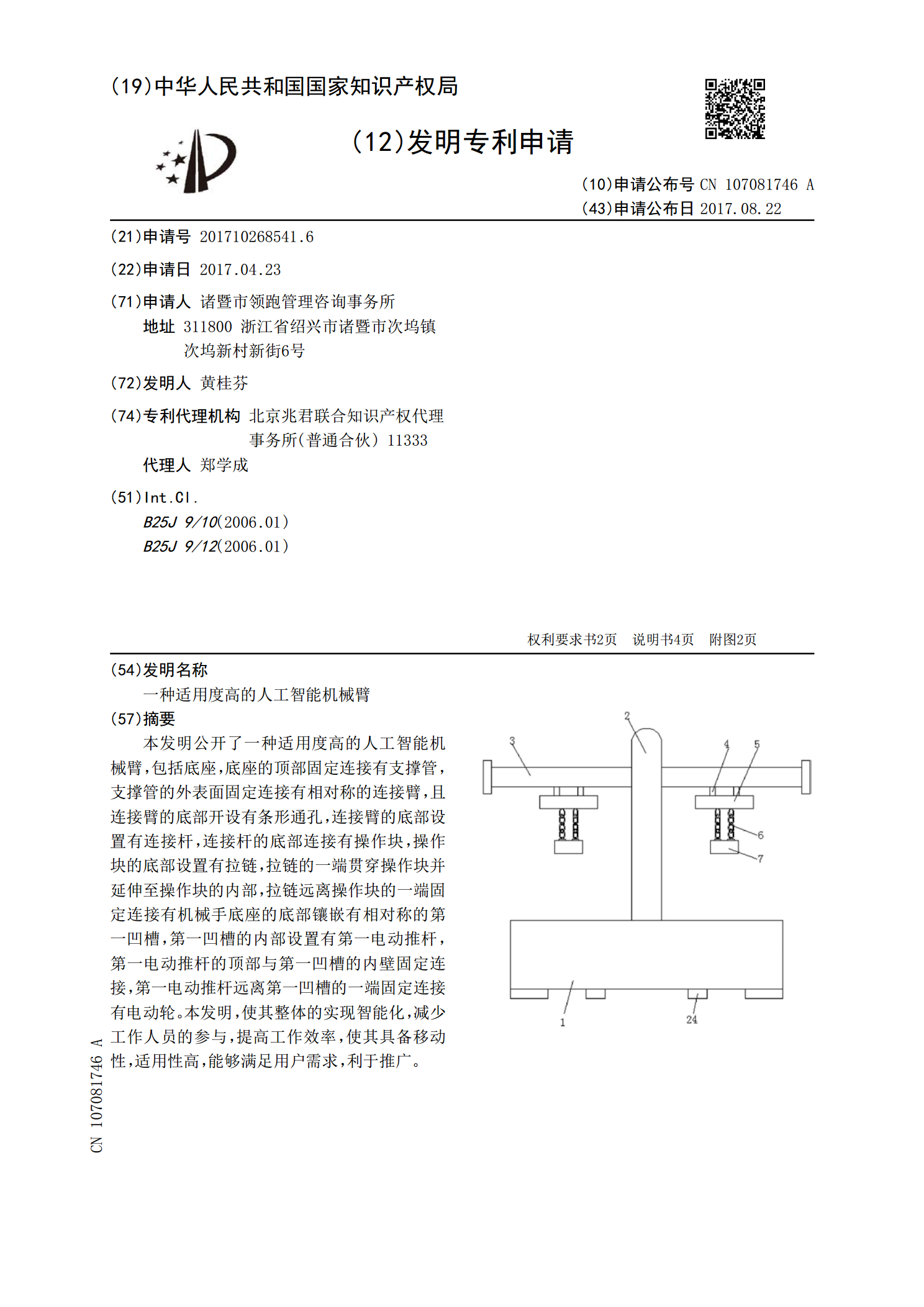
一种适用度高的人工智能机械臂.pdf
本发明公开了一种适用度高的人工智能机械臂,包括底座,底座的顶部固定连接有支撑管,支撑管的外表面固定连接有相对称的连接臂,且连接臂的底部开设有条形通孔,连接臂的底部设置有连接杆,连接杆的底部连接有操作块,操作块的底部设置有拉链,拉链的一端贯穿操作块并延伸至操作块的内部,拉链远离操作块的一端固定连接有机械手底座的底部镶嵌有相对称的第一凹槽,第一凹槽的内部设置有第一电动推杆,第一电动推杆的顶部与第一凹槽的内壁固定连接,第一电动推杆远离第一凹槽的一端固定连接有电动轮。本发明,使其整体的实现智能化,减少工作人员的参