
一种人工智能机械臂用柔性机构.pdf

光誉****君哥

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种人工智能机械臂用柔性机构.pdf
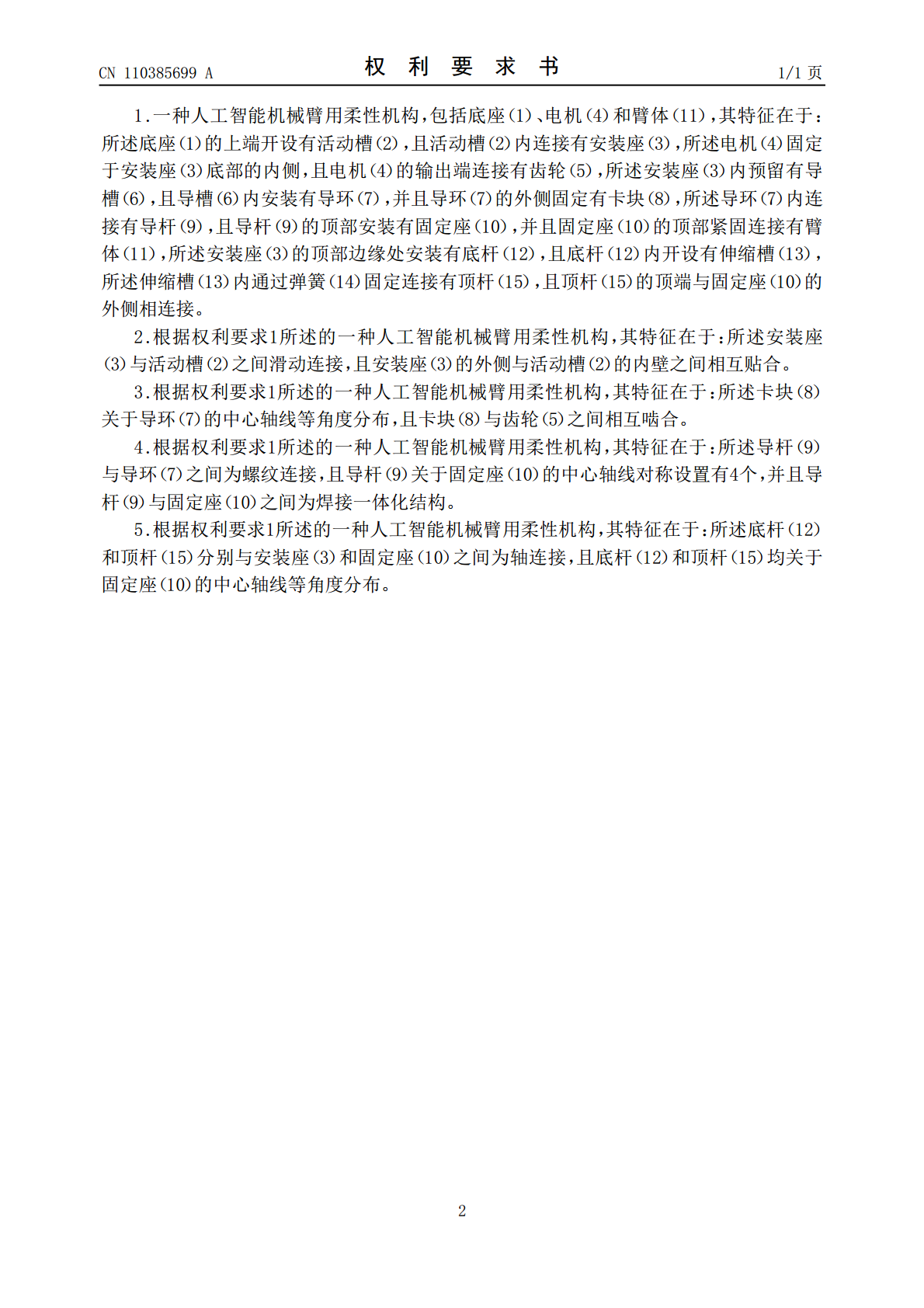
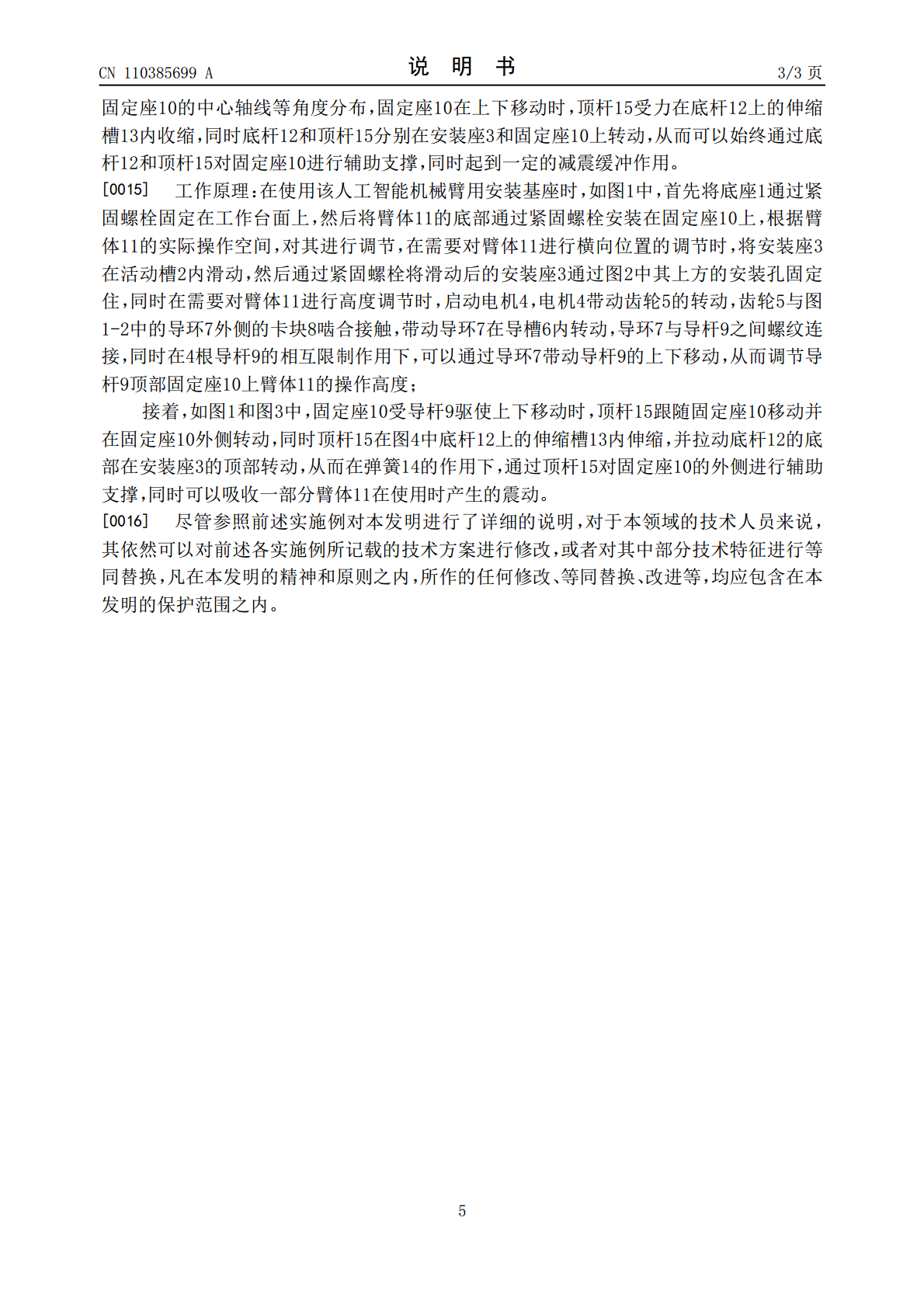
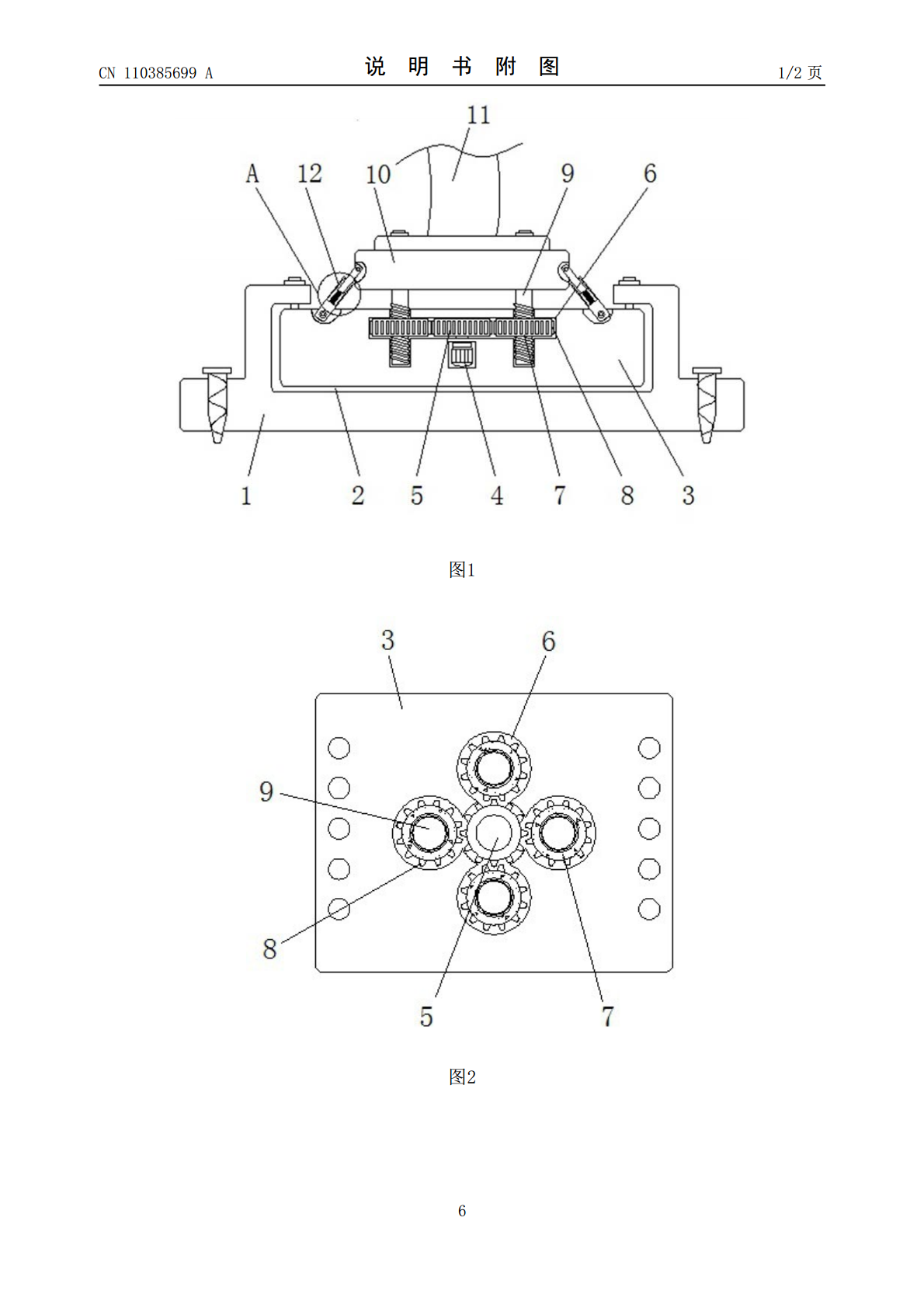
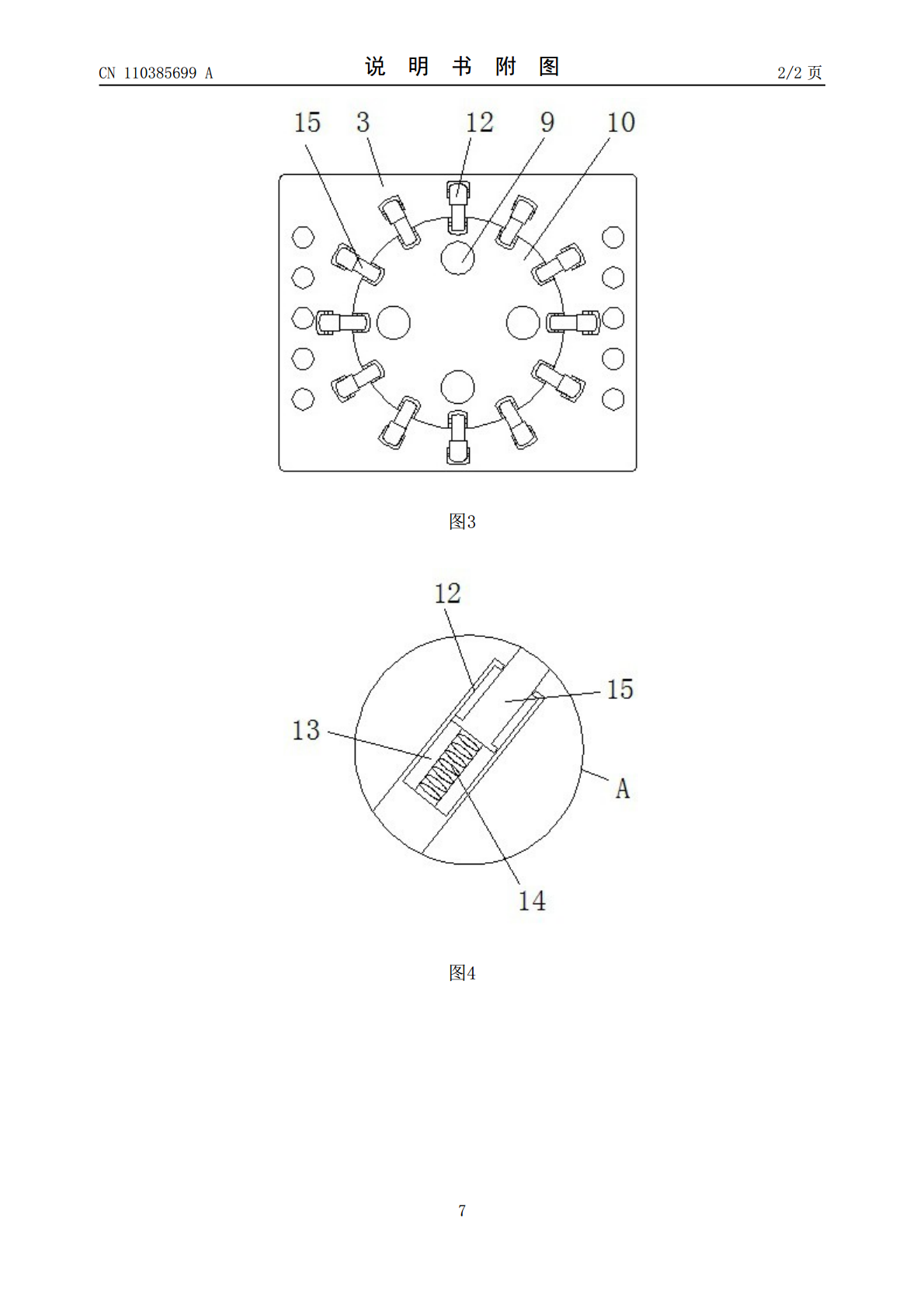
本发明公开了一种人工智能机械臂用柔性机构,包括底座、电机和臂体,所述底座的上端开设有活动槽,且活动槽内连接有安装座,所述电机固定于安装座底部的内侧,且电机的输出端连接有齿轮,所述安装座内预留有导槽,且导槽内安装有导环,并且导环的外侧固定有卡块,所述导环内连接有导杆,且导杆的顶部安装有固定座,并且固定座的顶部紧固连接有臂体,所述安装座的顶部边缘处安装有底杆,且底杆内开设有伸缩槽,所述伸缩槽内通过弹簧固定连接有顶杆,且顶杆的顶端与固定座的外侧相连接。该人工智能机械臂用安装基座,可以对固定安装后的机械臂进行横向
一种柔性摆臂吸附机构.pdf
本发明涉及自动化设备技术领域,具体是一种柔性摆臂吸附机构。一种柔性摆臂吸附机构,包括:固定底座:由主轴箱和固定法兰组成,主轴箱内设置有与之转动连接并从其一端伸出的主动轴;动力组件,机械臂,吸附组件,机械臂内安装有与之转动链接的联动轴,联动轴的两端分别固定套设有第一锥齿轮、第二锥齿轮,主轴箱的外部固定安装有固定齿轮,第一锥齿轮与固定齿轮啮合,吸附组件包括与机械臂转动连接的从动轴以及安装在从动轴上的真空吸盘,从动轴上固定安装有与第二锥齿轮啮合的从动齿轮。实现物料换向,方便物料取放,克服机械臂旋转所带来工位变化
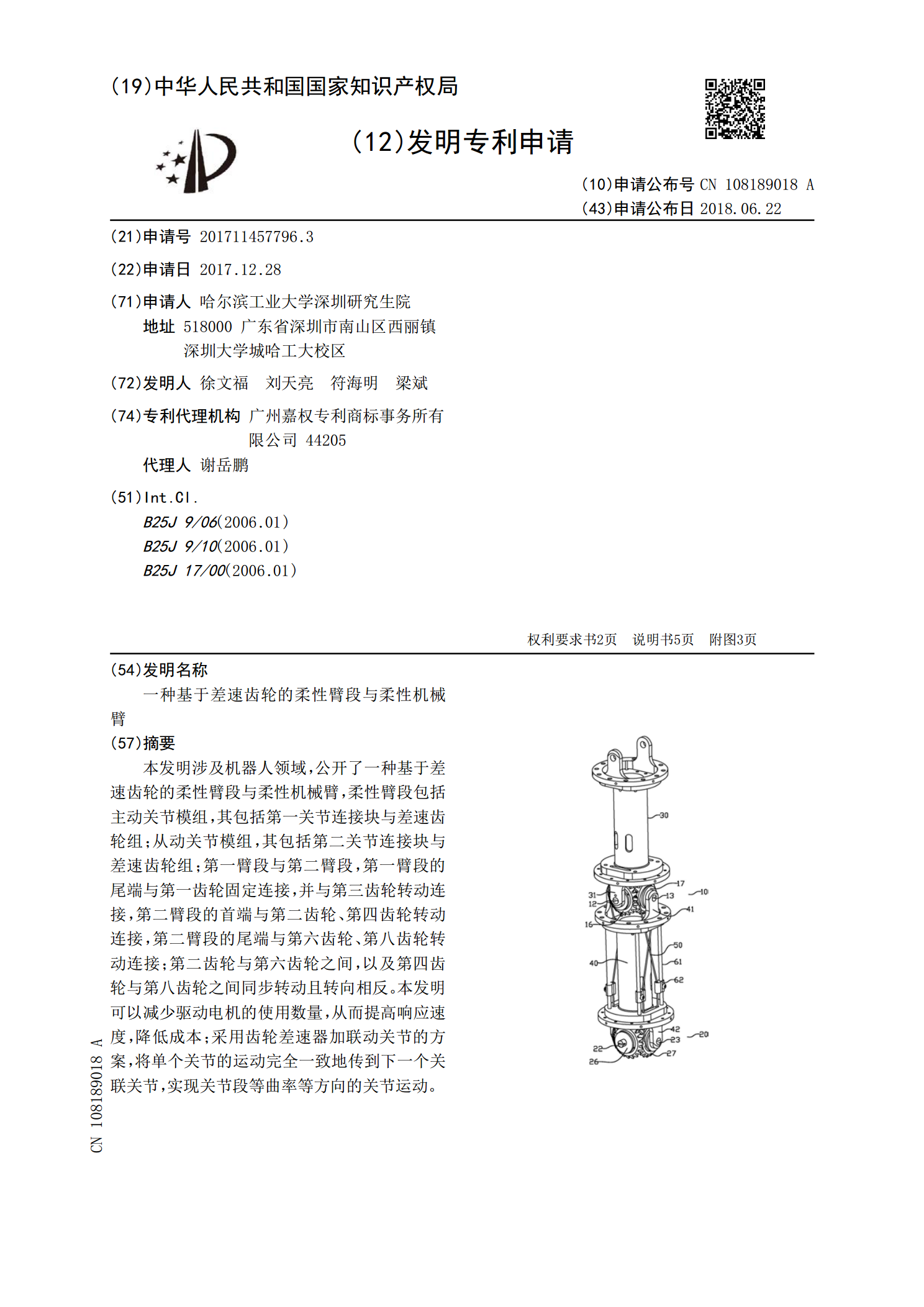
一种基于差速齿轮的柔性臂段与柔性机械臂.pdf
本发明涉及机器人领域,公开了一种基于差速齿轮的柔性臂段与柔性机械臂,柔性臂段包括主动关节模组,其包括第一关节连接块与差速齿轮组;从动关节模组,其包括第二关节连接块与差速齿轮组;第一臂段与第二臂段,第一臂段的尾端与第一齿轮固定连接,并与第三齿轮转动连接,第二臂段的首端与第二齿轮、第四齿轮转动连接,第二臂段的尾端与第六齿轮、第八齿轮转动连接;第二齿轮与第六齿轮之间,以及第四齿轮与第八齿轮之间同步转动且转向相反。本发明可以减少驱动电机的使用数量,从而提高响应速度,降低成本;采用齿轮差速器加联动关节的方案,将单个
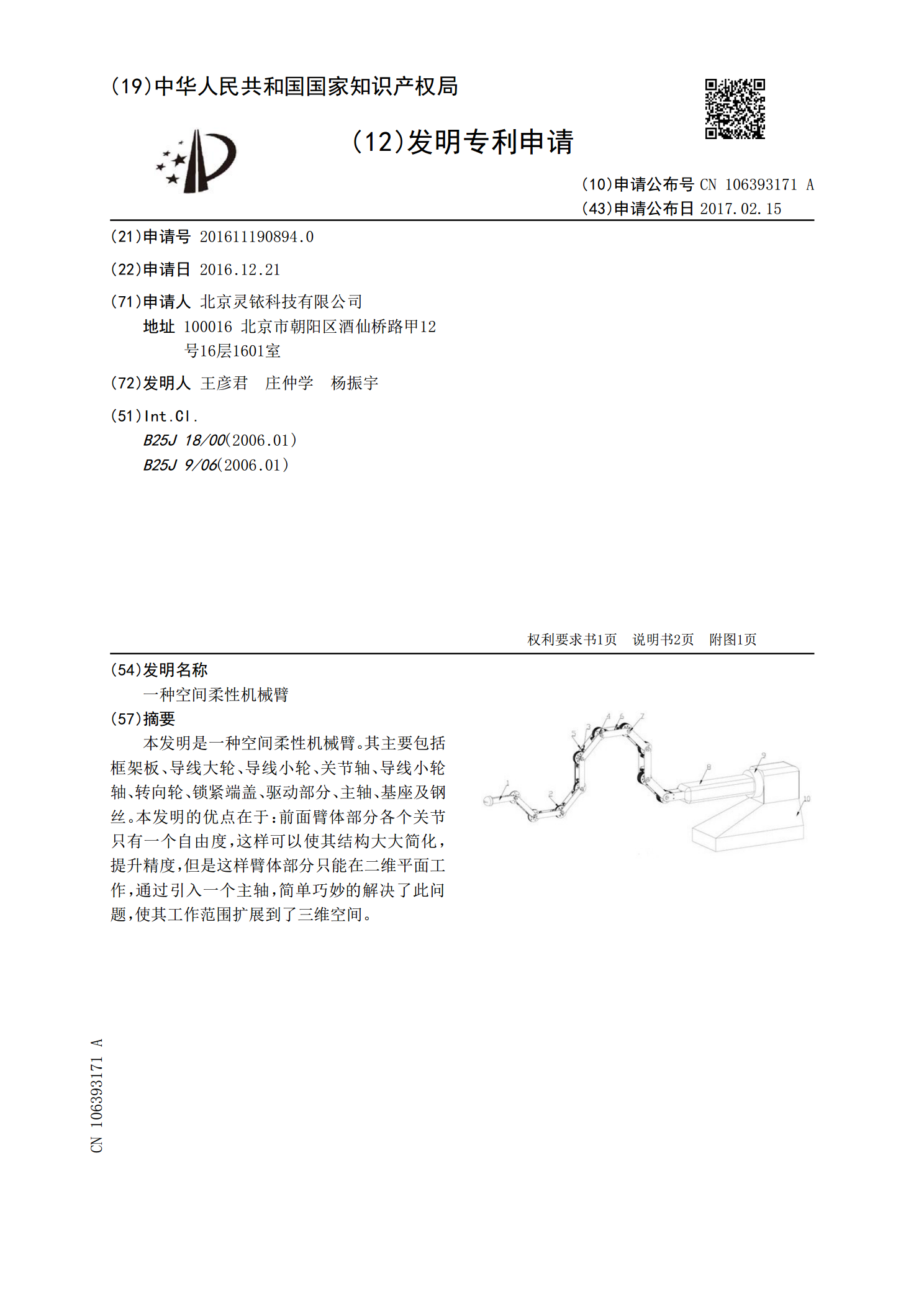
一种空间柔性机械臂.pdf
本发明是一种空间柔性机械臂。其主要包括框架板、导线大轮、导线小轮、关节轴、导线小轮轴、转向轮、锁紧端盖、驱动部分、主轴、基座及钢丝。本发明的优点在于:前面臂体部分各个关节只有一个自由度,这样可以使其结构大大简化,提升精度,但是这样臂体部分只能在二维平面工作,通过引入一个主轴,简单巧妙的解决了此问题,使其工作范围扩展到了三维空间。
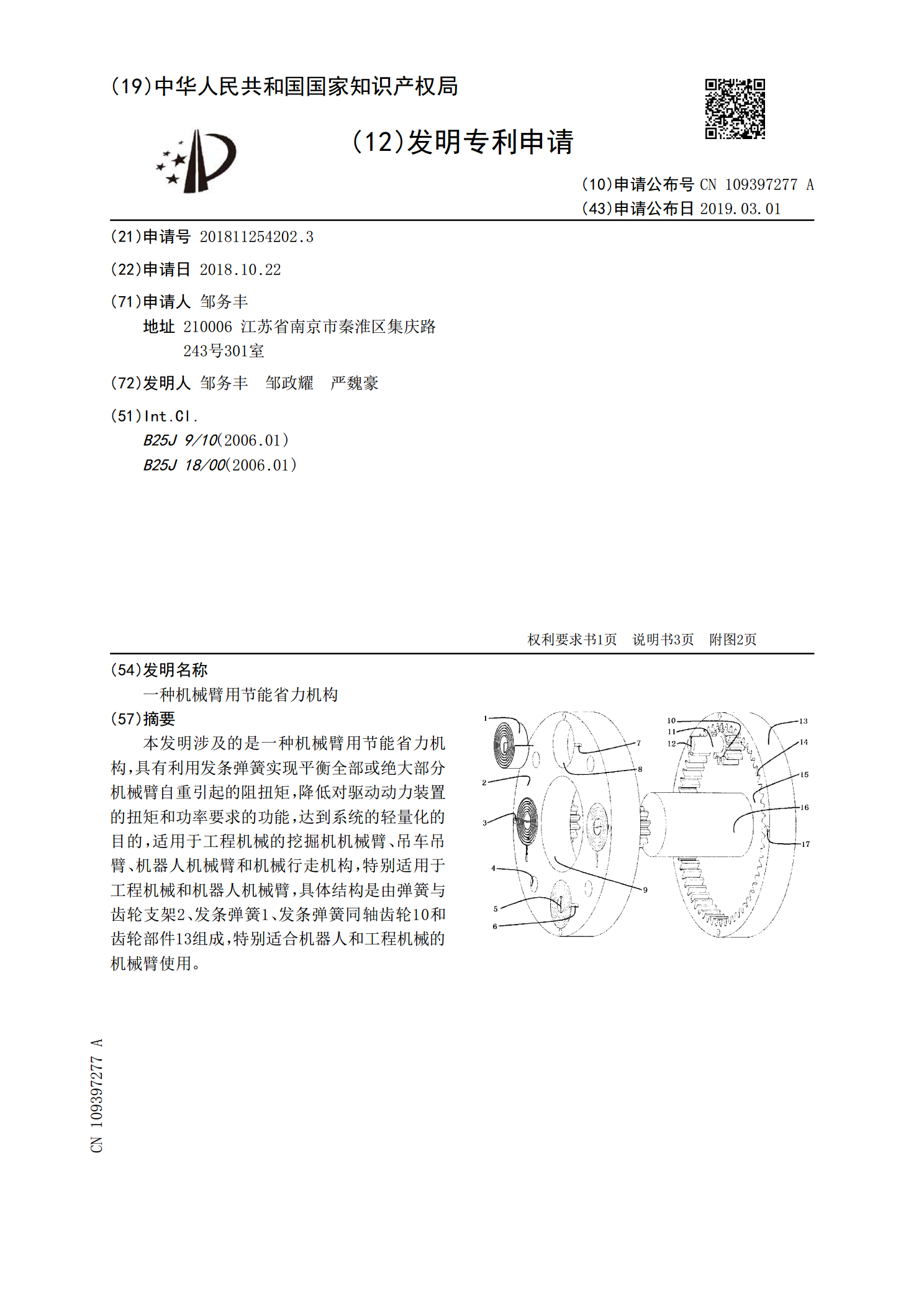
一种机械臂用节能省力机构.pdf
本发明涉及的是一种机械臂用节能省力机构,具有利用发条弹簧实现平衡全部或绝大部分机械臂自重引起的阻扭矩,降低对驱动动力装置的扭矩和功率要求的功能,达到系统的轻量化的目的,适用于工程机械的挖掘机机械臂、吊车吊臂、机器人机械臂和机械行走机构,特别适用于工程机械和机器人机械臂,具体结构是由弹簧与齿轮支架2、发条弹簧1、发条弹簧同轴齿轮10和齿轮部件13组成,特别适合机器人和工程机械的机械臂使用。