
一种焊接机械臂.pdf

努力****梓颖

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种焊接机械臂.pdf
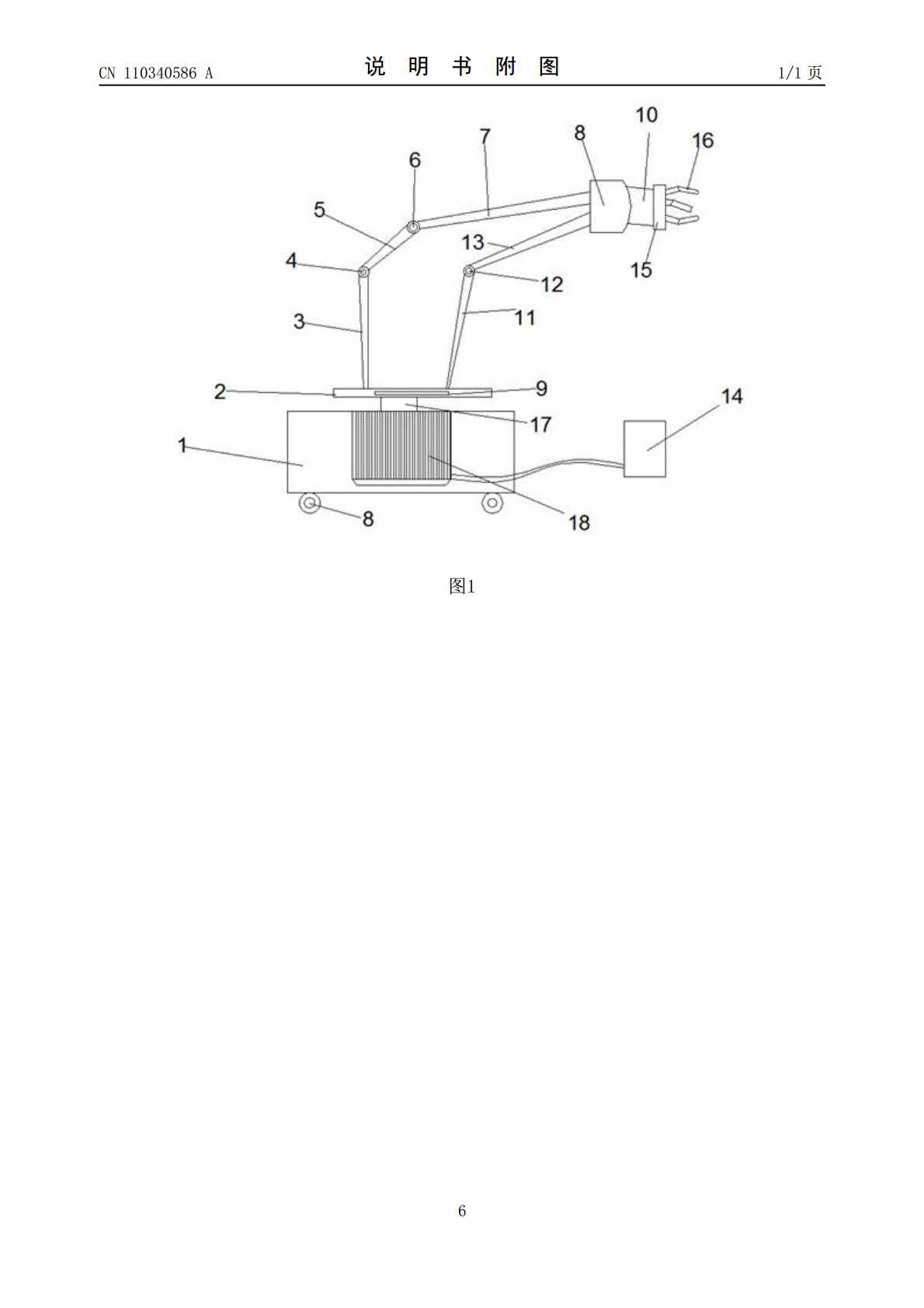
本发明公开了一种焊接机械臂,包括,底座、电机、万向轮、电源、转动轴、旋转圆盘、控制装置、旋转臂、活动臂接头、装配盘和机械手,底座内设有电机,底座下设有万向轮,底座外设有电源,电机上设有旋转圆盘,电机通过转动轴和旋转圆盘连接,旋转内控制系统,旋转圆盘上设有第一节电动伸缩杆、第二节伸缩杆、第一节活动关节轴、第二节活动关节轴、第三节电动伸缩杆、第四节电动伸缩杆、第三节活动关节轴和第五节电动伸缩杆,右侧设有旋转臂,旋转臂右端设有活动臂接头,活动臂接头右端设有装配盘,装配盘右端设有机械手;新型产品可调换机械手、精度
一种用于护栏焊接的机械臂.pdf
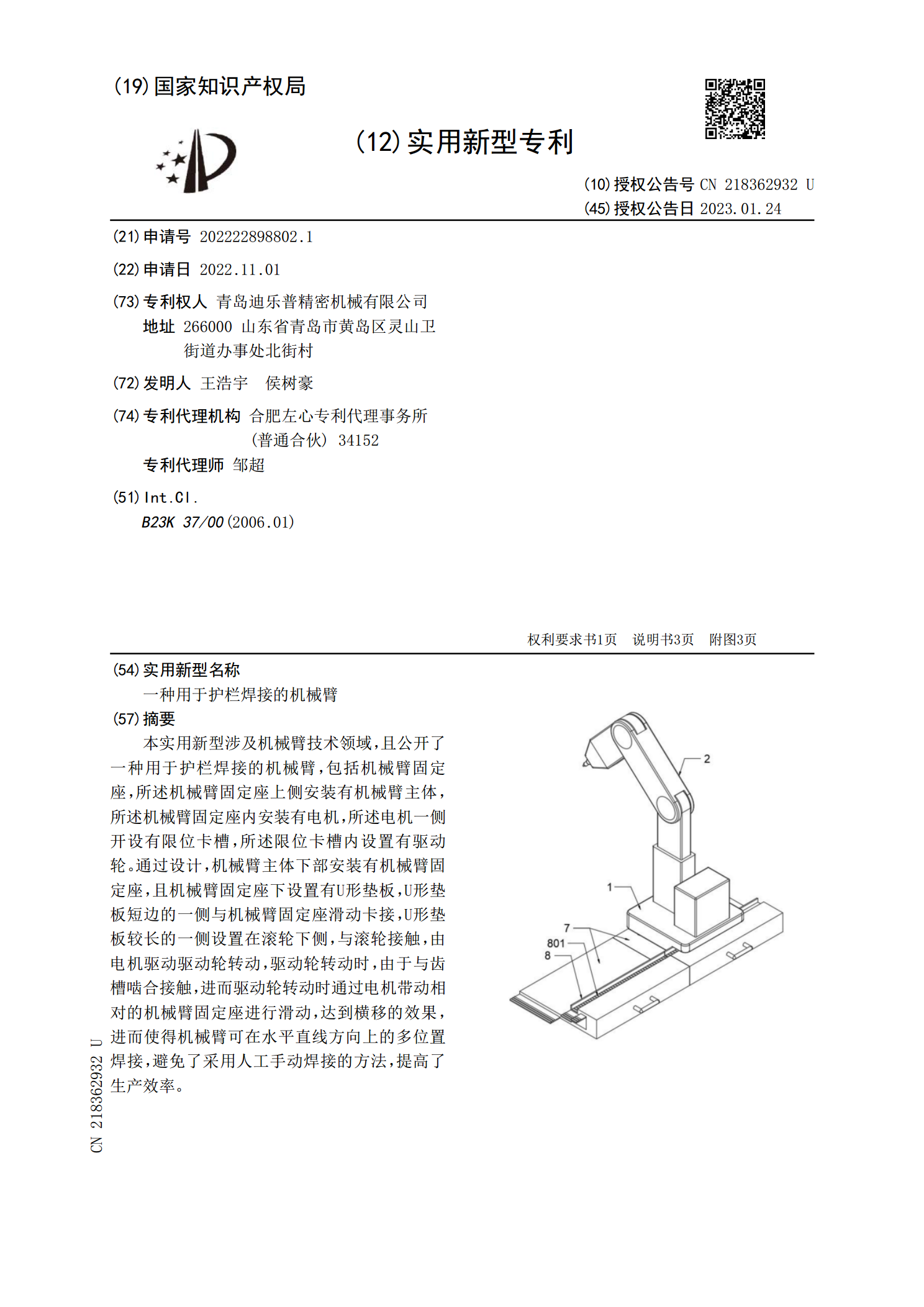
本实用新型涉及机械臂技术领域,且公开了一种用于护栏焊接的机械臂,包括机械臂固定座,所述机械臂固定座上侧安装有机械臂主体,所述机械臂固定座内安装有电机,所述电机一侧开设有限位卡槽,所述限位卡槽内设置有驱动轮。通过设计,机械臂主体下部安装有机械臂固定座,且机械臂固定座下设置有U形垫板,U形垫板短边的一侧与机械臂固定座滑动卡接,U形垫板较长的一侧设置在滚轮下侧,与滚轮接触,由电机驱动驱动轮转动,驱动轮转动时,由于与齿槽啮合接触,进而驱动轮转动时通过电机带动相对的机械臂固定座进行滑动,达到横移的效果,进而使得机械
一种带有机械臂的焊接装置.pdf
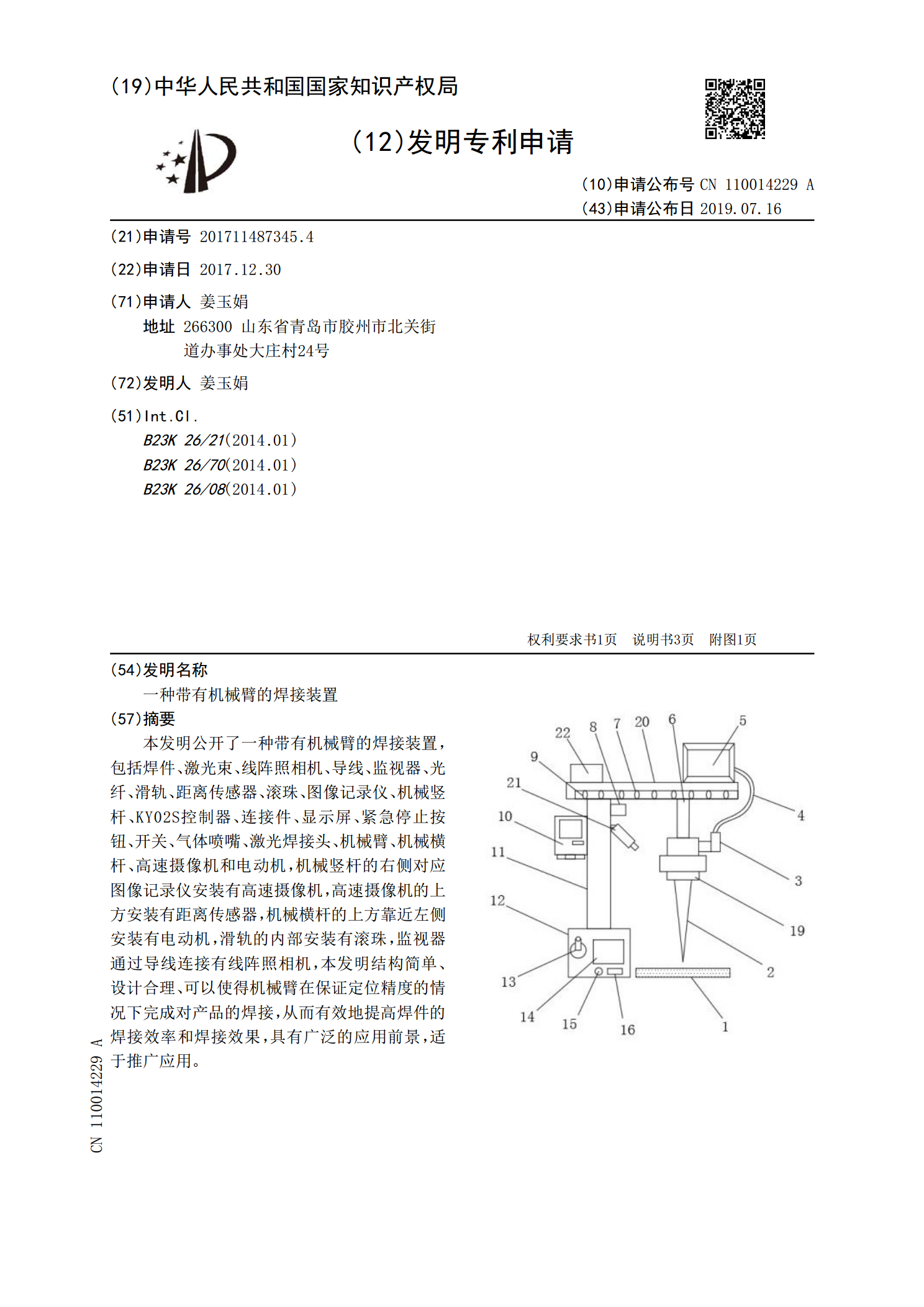
本发明公开了一种带有机械臂的焊接装置,包括焊件、激光束、线阵照相机、导线、监视器、光纤、滑轨、距离传感器、滚珠、图像记录仪、机械竖杆、KY02S控制器、连接件、显示屏、紧急停止按钮、开关、气体喷嘴、激光焊接头、机械臂、机械横杆、高速摄像机和电动机,机械竖杆的右侧对应图像记录仪安装有高速摄像机,高速摄像机的上方安装有距离传感器,机械横杆的上方靠近左侧安装有电动机,滑轨的内部安装有滚珠,监视器通过导线连接有线阵照相机,本发明结构简单、设计合理、可以使得机械臂在保证定位精度的情况下完成对产品的焊接,从而有效地提
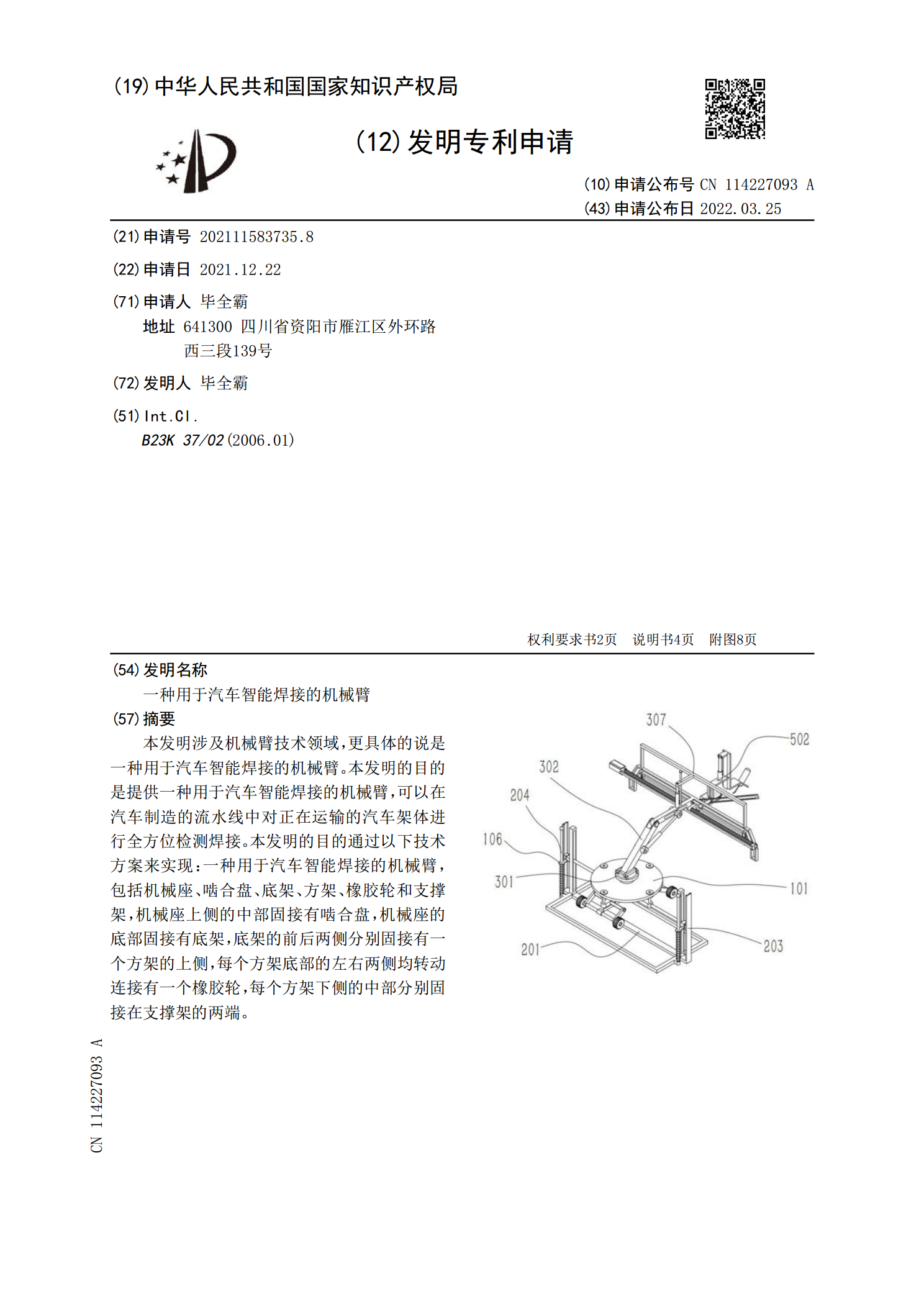
一种用于汽车智能焊接的机械臂.pdf
本发明涉及机械臂技术领域,更具体的说是一种用于汽车智能焊接的机械臂。本发明的目的是提供一种用于汽车智能焊接的机械臂,可以在汽车制造的流水线中对正在运输的汽车架体进行全方位检测焊接。本发明的目的通过以下技术方案来实现:一种用于汽车智能焊接的机械臂,包括机械座、啮合盘、底架、方架、橡胶轮和支撑架,机械座上侧的中部固接有啮合盘,机械座的底部固接有底架,底架的前后两侧分别固接有一个方架的上侧,每个方架底部的左右两侧均转动连接有一个橡胶轮,每个方架下侧的中部分别固接在支撑架的两端。
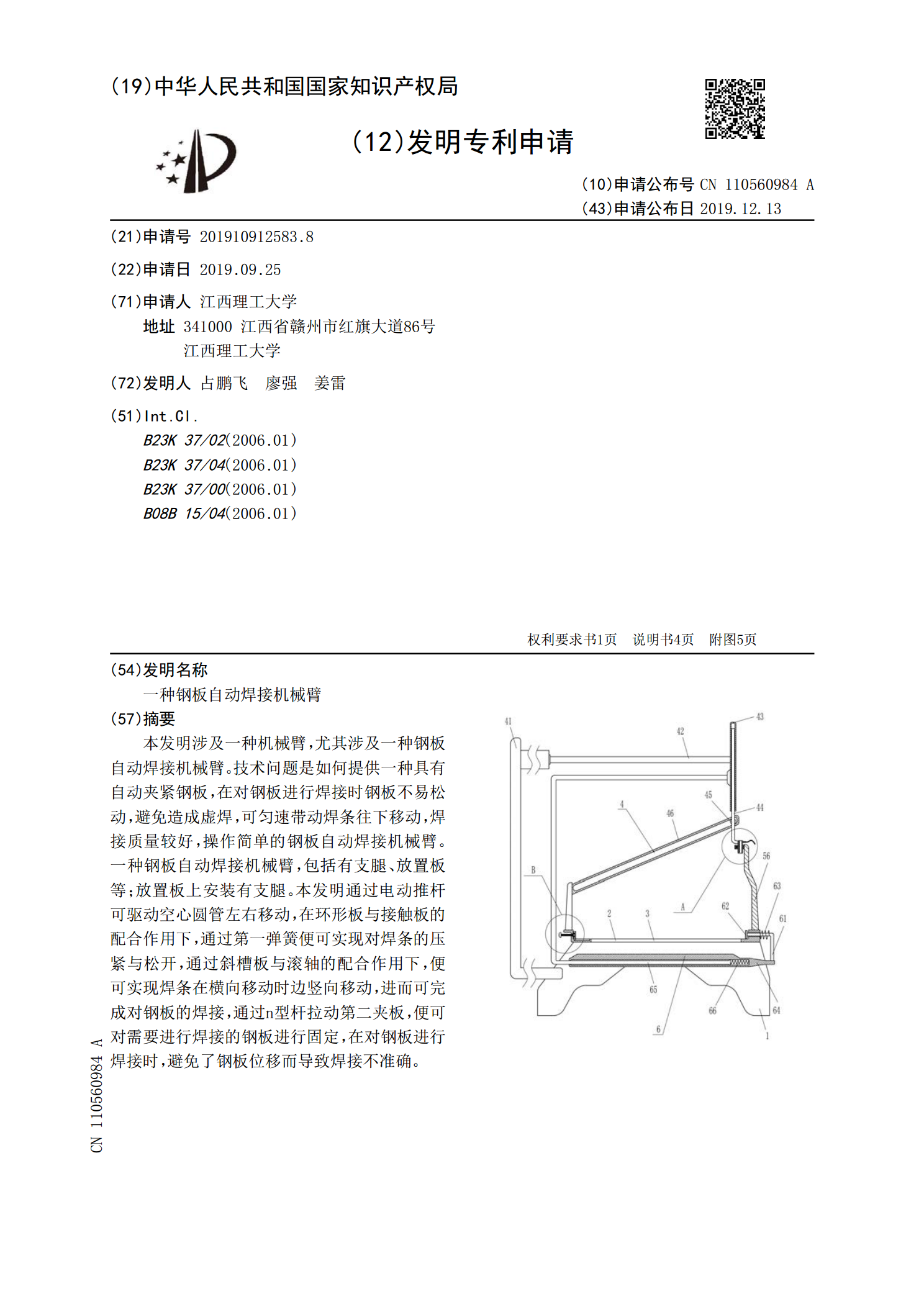
一种钢板自动焊接机械臂.pdf
本发明涉及一种机械臂,尤其涉及一种钢板自动焊接机械臂。技术问题是如何提供一种具有自动夹紧钢板,在对钢板进行焊接时钢板不易松动,避免造成虚焊,可匀速带动焊条往下移动,焊接质量较好,操作简单的钢板自动焊接机械臂。一种钢板自动焊接机械臂,包括有支腿、放置板等;放置板上安装有支腿。本发明通过电动推杆可驱动空心圆管左右移动,在环形板与接触板的配合作用下,通过第一弹簧便可实现对焊条的压紧与松开,通过斜槽板与滚轴的配合作用下,便可实现焊条在横向移动时边竖向移动,进而可完成对钢板的焊接,通过n型杆拉动第二夹板,便可对需要