
深度图处理方法、装置和电子设备.pdf

a是****澜吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

深度图处理方法、装置和电子设备.pdf
本申请提出一种深度图处理方法、装置和电子设备,其中,方法包括:获取深度图;其中,深度图中各像素单元具有对应的深度和深度的置信度;根据初始的置信阈值,在深度图中确定目标轮廓;其中,目标轮廓是根据深度图的各像素单元中,对应深度的置信度符合置信阈值的目标像素单元确定的;根据成像图中的前景对象轮廓,调整置信阈值,以使目标轮廓与前景对象轮廓匹配;其中,成像图和深度图同步采集得到;根据调整后的置信阈值,对深度图内各像素单元对应深度进行滤波处理。该方法能够实现有效去除深度图中的异常点,比如飞像素点,改善深度图的平滑性。
深度图像的边缘检测方法、装置和电子设备.pdf
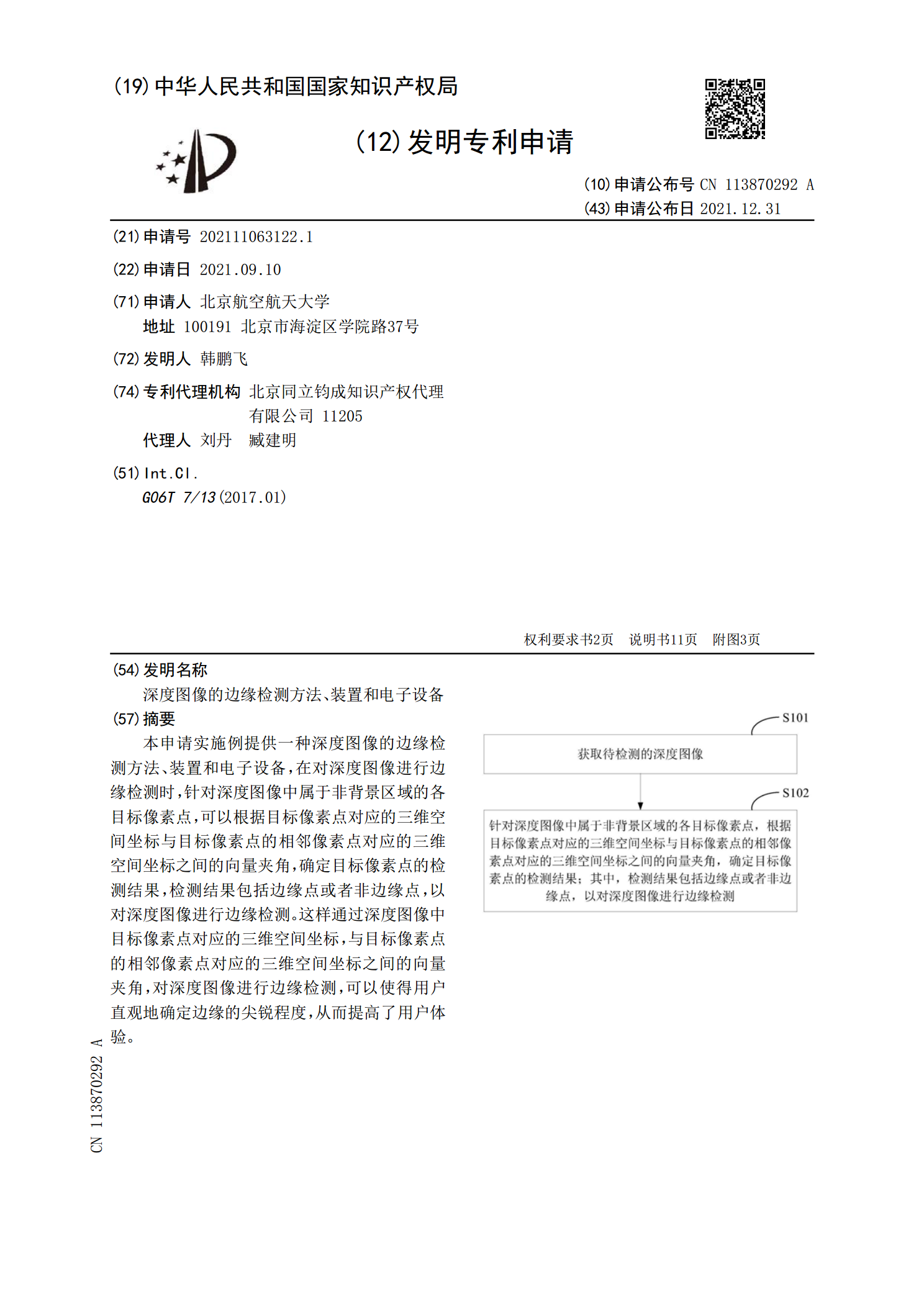
本申请实施例提供一种深度图像的边缘检测方法、装置和电子设备,在对深度图像进行边缘检测时,针对深度图像中属于非背景区域的各目标像素点,可以根据目标像素点对应的三维空间坐标与目标像素点的相邻像素点对应的三维空间坐标之间的向量夹角,确定目标像素点的检测结果,检测结果包括边缘点或者非边缘点,以对深度图像进行边缘检测。这样通过深度图像中目标像素点对应的三维空间坐标,与目标像素点的相邻像素点对应的三维空间坐标之间的向量夹角,对深度图像进行边缘检测,可以使得用户直观地确定边缘的尖锐程度,从而提高了用户体验。

深度图像的处理方法、装置、设备和存储介质.pdf
本发明公开了一种深度图像的处理方法、装置、设备和存储介质。该方法包括:获取同一空间区域下的彩色图像和深度图像;通过预训练神经网络预测所述彩色图像中的目标三维信息,其中,所述预训练神经网络通过样本彩色图像和所述样本彩色图像中的样本三维信息训练得到;根据所述目标三维信息,填补所述深度图像中的空洞以及所述深度图像相对所述彩色图像的视野盲区。该方法不仅对深度图像中存在的空洞进行了深度填补,同时,还对深度图像的视野盲区进行了深度填补,从而扩大了深度图像的视角范围以及深度范围。
处理方法、处理装置和电子设备.pdf
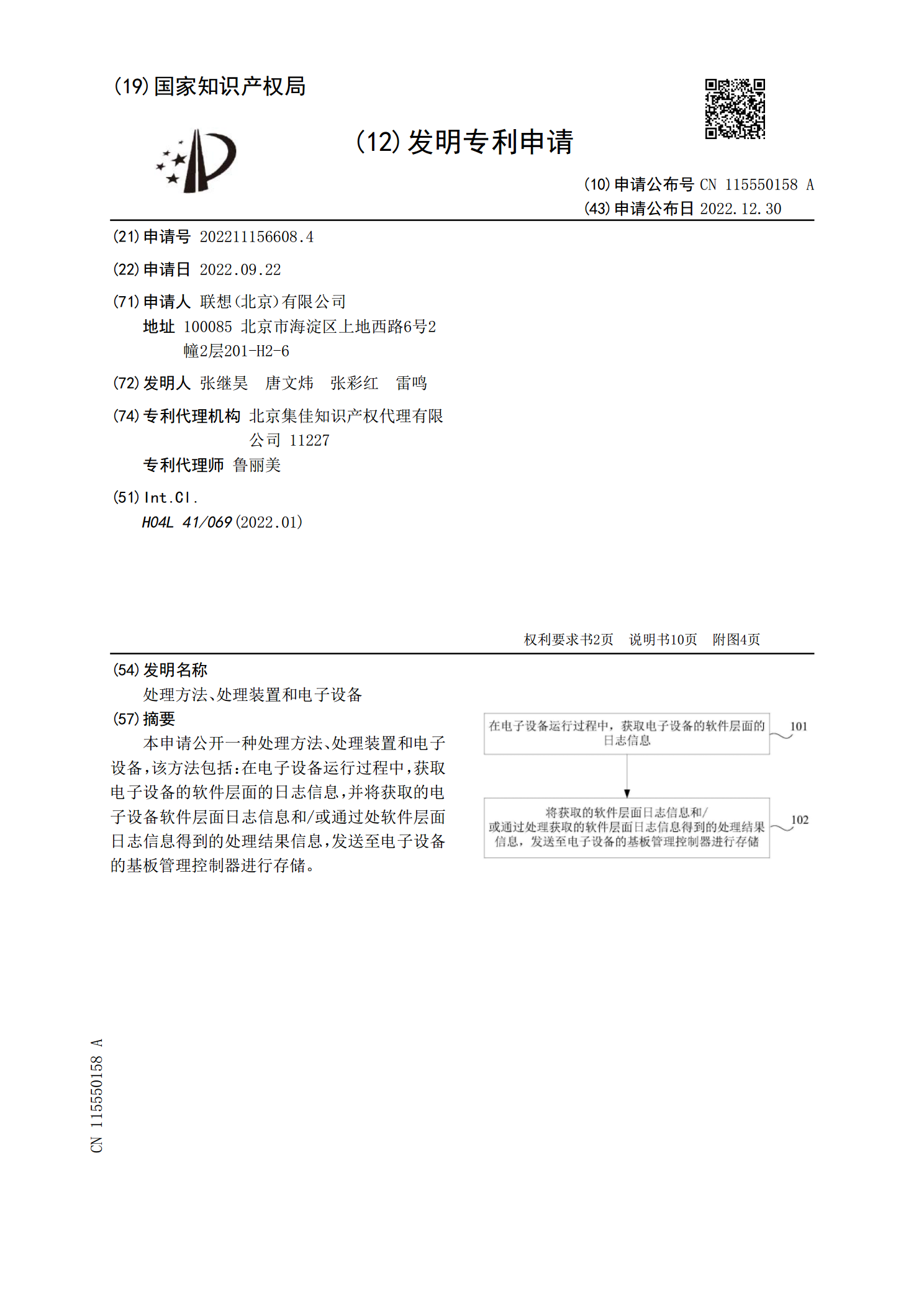
本申请公开一种处理方法、处理装置和电子设备,该方法包括:在电子设备运行过程中,获取电子设备的软件层面的日志信息,并将获取的电子设备软件层面日志信息和/或通过处软件层面日志信息得到的处理结果信息,发送至电子设备的基板管理控制器进行存储。
生成深度图的方法、装置、电子设备和可读存储介质.pdf
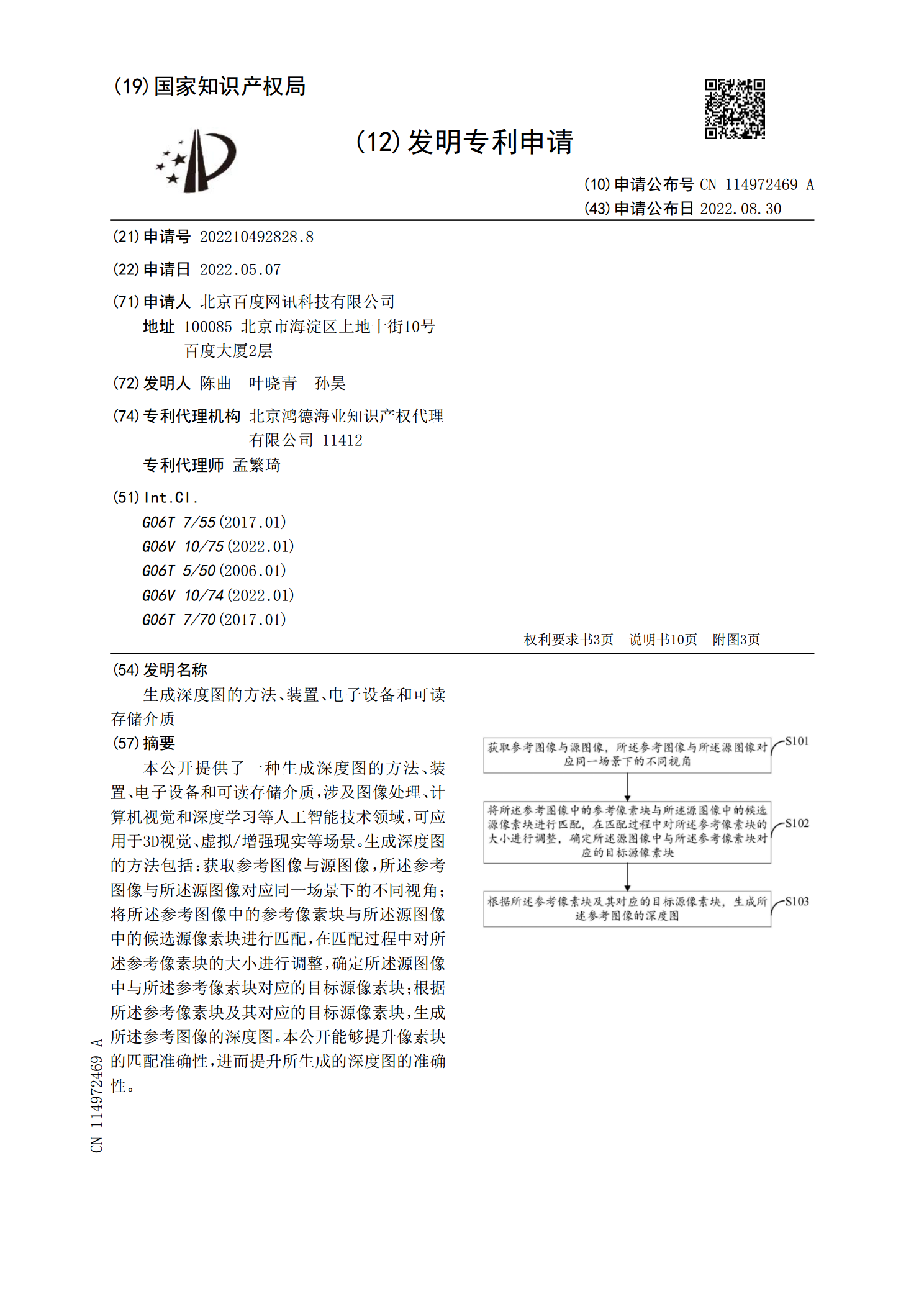
本公开提供了一种生成深度图的方法、装置、电子设备和可读存储介质,涉及图像处理、计算机视觉和深度学习等人工智能技术领域,可应用于3D视觉、虚拟/增强现实等场景。生成深度图的方法包括:获取参考图像与源图像,所述参考图像与所述源图像对应同一场景下的不同视角;将所述参考图像中的参考像素块与所述源图像中的候选源像素块进行匹配,在匹配过程中对所述参考像素块的大小进行调整,确定所述源图像中与所述参考像素块对应的目标源像素块;根据所述参考像素块及其对应的目标源像素块,生成所述参考图像的深度图。本公开能够提升像素块的匹配准