
深度图像的处理方法、装置、设备和存储介质.pdf

和裕****az


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

深度图像的处理方法、装置、设备和存储介质.pdf
本发明公开了一种深度图像的处理方法、装置、设备和存储介质。该方法包括:获取同一空间区域下的彩色图像和深度图像;通过预训练神经网络预测所述彩色图像中的目标三维信息,其中,所述预训练神经网络通过样本彩色图像和所述样本彩色图像中的样本三维信息训练得到;根据所述目标三维信息,填补所述深度图像中的空洞以及所述深度图像相对所述彩色图像的视野盲区。该方法不仅对深度图像中存在的空洞进行了深度填补,同时,还对深度图像的视野盲区进行了深度填补,从而扩大了深度图像的视角范围以及深度范围。

图像处理方法、装置、设备和存储介质.pdf
本申请提供一种图像处理方法、装置、设备和存储介质。该方法包括:通过终端设备提供图形用户界面,图形用户界面中包括通过虚拟摄像头所捕获的场景图像,场景图像中包含虚拟对象,该方法包括:获取针对虚拟对象的初始贴图,初始贴图带有基础图案,获取虚拟摄像头的当前朝向;获取在虚拟摄像头的当前朝向下初始贴图对应的目标晕染贴图,目标晕染贴图为在当前朝向下对初始贴图进行晕染处理后得到的贴图;根据当前朝向、目标晕染贴图和初始贴图,对虚拟对象进行渲染。本申请实施例实现了根据用户观察角度,即虚拟摄像头的当前朝向、虚拟对象的初始贴图和
图像处理方法、装置、设备和存储介质.pdf
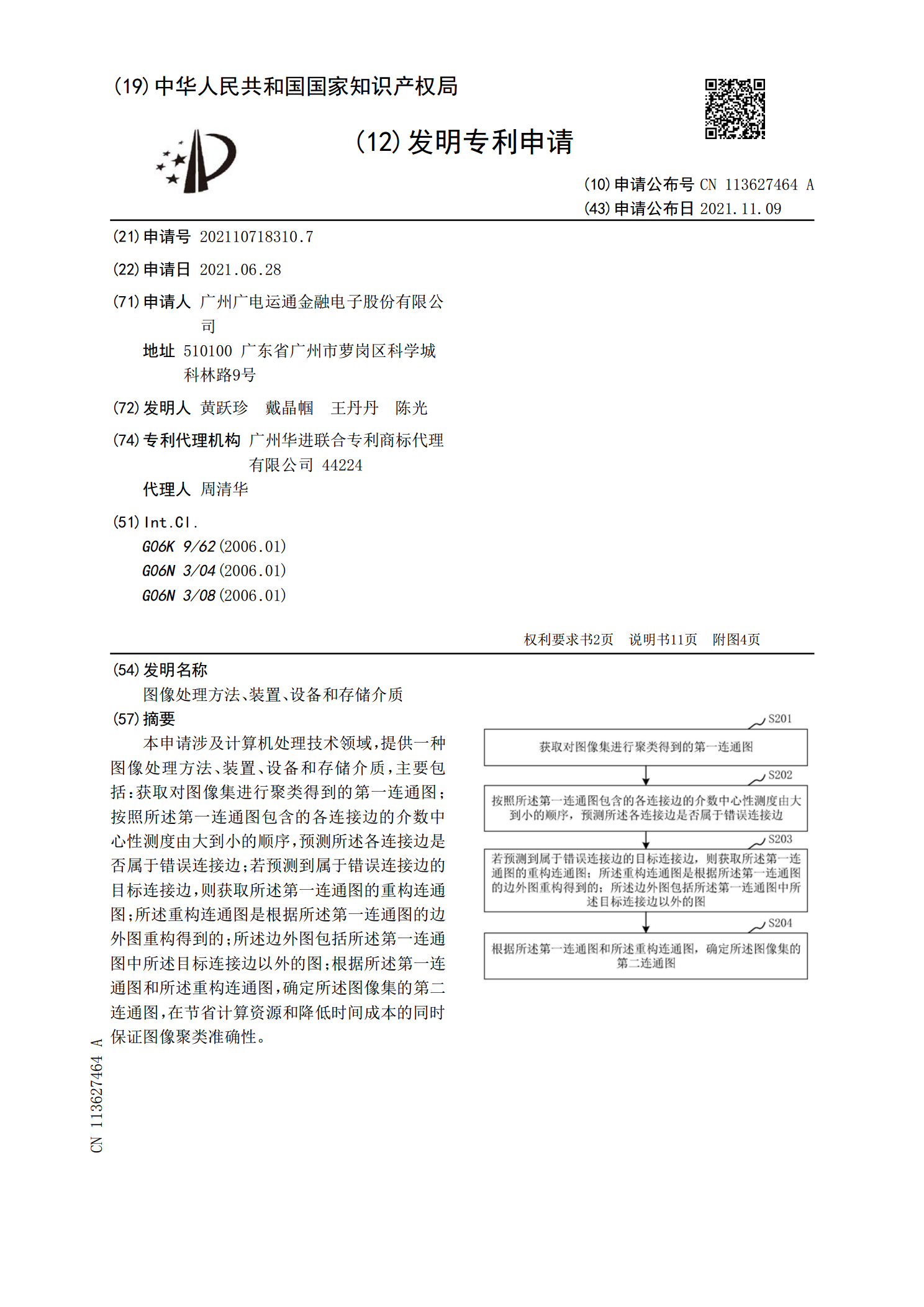
本申请涉及计算机处理技术领域,提供一种图像处理方法、装置、设备和存储介质,主要包括:获取对图像集进行聚类得到的第一连通图;按照所述第一连通图包含的各连接边的介数中心性测度由大到小的顺序,预测所述各连接边是否属于错误连接边;若预测到属于错误连接边的目标连接边,则获取所述第一连通图的重构连通图;所述重构连通图是根据所述第一连通图的边外图重构得到的;所述边外图包括所述第一连通图中所述目标连接边以外的图;根据所述第一连通图和所述重构连通图,确定所述图像集的第二连通图,在节省计算资源和降低时间成本的同时保证图像聚类

图像处理方法、装置、设备和存储介质.pdf
本申请公开了一种图像处理方法、装置、设备和存储介质,属于图像处理技术领域。该图像处理方法包括:获取目标对象在第一图像中的第一坐标;根据第一图像的尺寸、目标尺寸和第一坐标,确定第二坐标;显示目标尺寸的第二图像,其中,第二图像是基于第一图像生成的,第二图像的中心位置为第二坐标。

图像处理方法、装置、设备和存储介质.pdf
本发明提供一种图像处理方法、装置、设备和存储介质。该方法包括:获取待旋转图像的图像矩阵,所述图像矩阵包括至少一个2×2子矩阵;根据neon指令在预设旋转方向上并行旋转所述至少一个2×2子矩阵,得到至少一个旋转后的2×2子矩阵;根据所述至少一个旋转后的2×2子矩阵,生成旋转后的图像。本发明实施例提高了图像旋转效率。