
深度图像的边缘检测方法、装置和电子设备.pdf

一条****淑淑

1/10

2/10
3/10
4/10

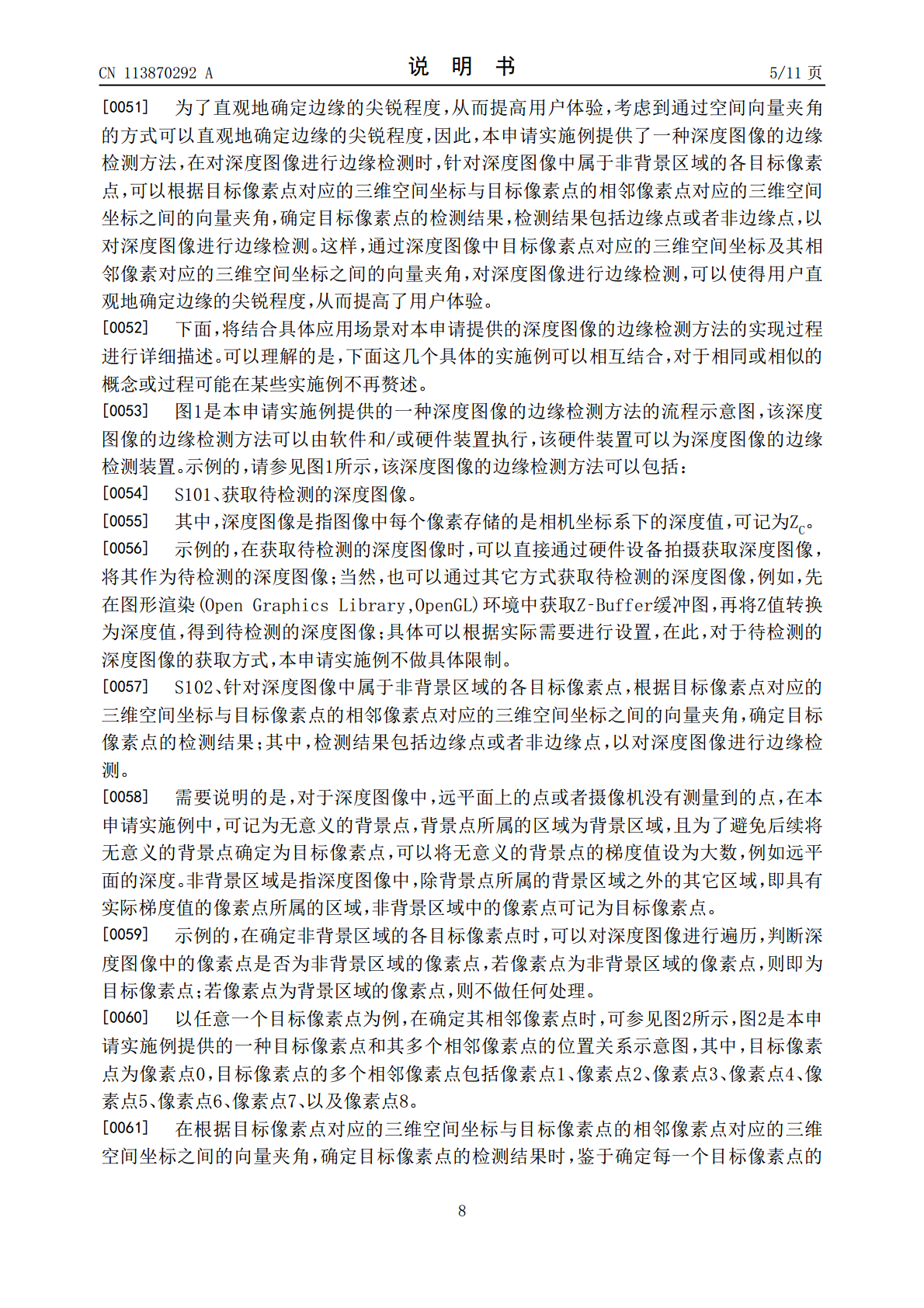
5/10
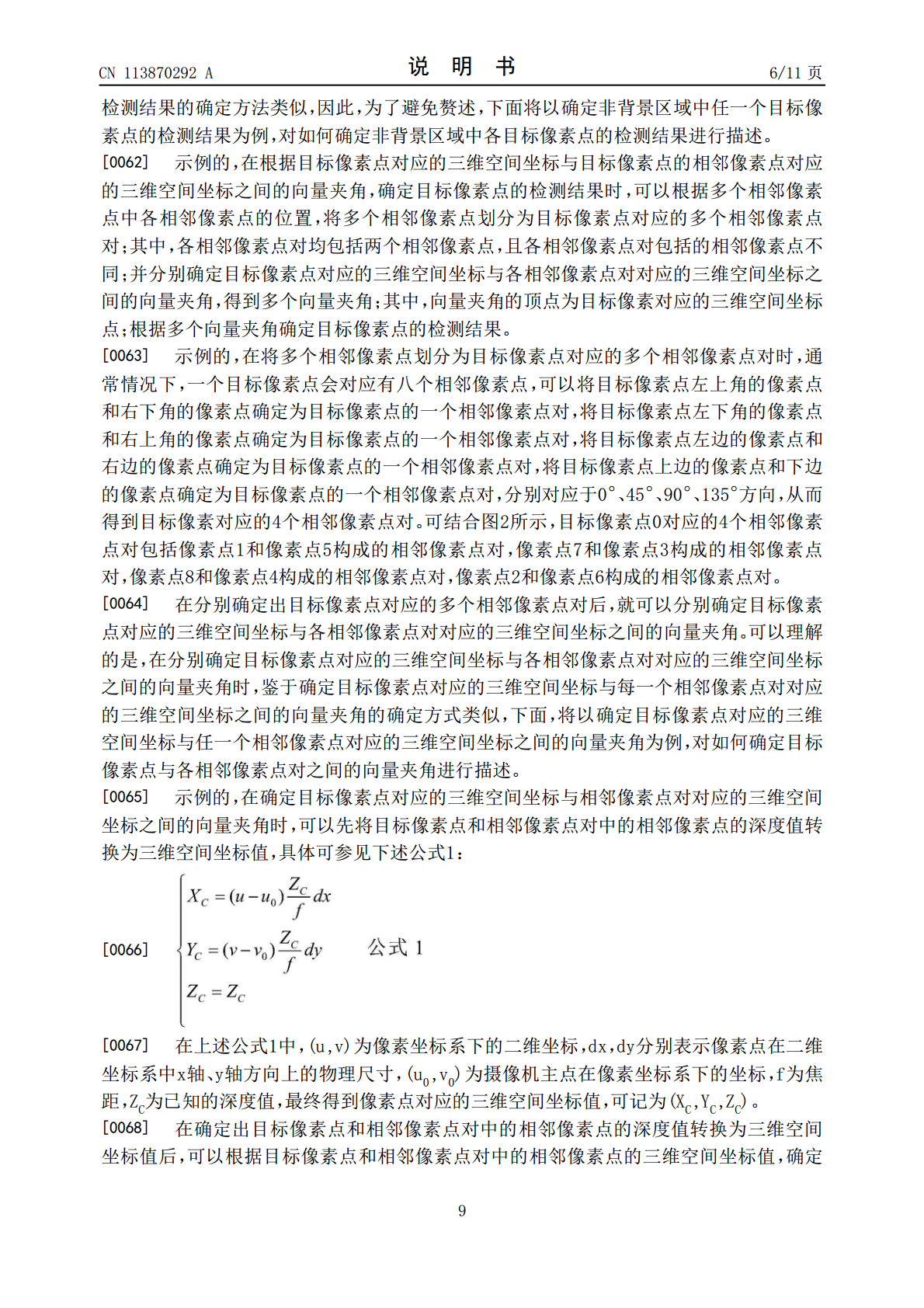
6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
深度图像的边缘检测方法、装置和电子设备.pdf
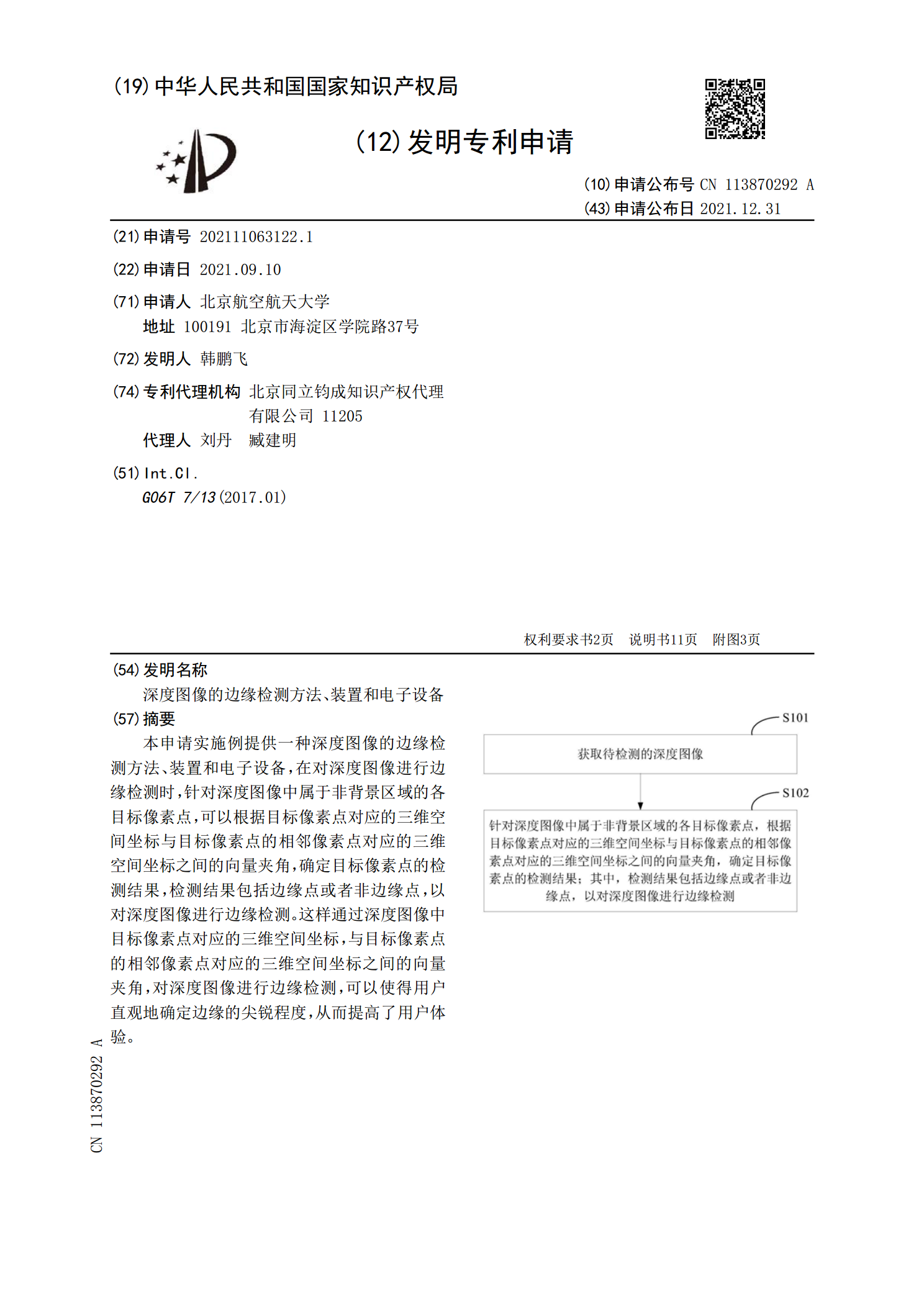
本申请实施例提供一种深度图像的边缘检测方法、装置和电子设备,在对深度图像进行边缘检测时,针对深度图像中属于非背景区域的各目标像素点,可以根据目标像素点对应的三维空间坐标与目标像素点的相邻像素点对应的三维空间坐标之间的向量夹角,确定目标像素点的检测结果,检测结果包括边缘点或者非边缘点,以对深度图像进行边缘检测。这样通过深度图像中目标像素点对应的三维空间坐标,与目标像素点的相邻像素点对应的三维空间坐标之间的向量夹角,对深度图像进行边缘检测,可以使得用户直观地确定边缘的尖锐程度,从而提高了用户体验。

深度图像边缘飞点的检测方法、装置及电子设备.pdf
本发明公开了一种深度图像边缘飞点的检测方法、装置及电子设备,其中,深度图像边缘飞点的检测方法包括:采集深度图像的图像数据;根据图像数据计算出深度图像中每个像素点的法向量;根据法向量,利用边缘检测算子计算出深度图像的边缘点;将边缘点作为种子点,并判断种子点是否满足生长条件;如果满足生长条件,则确定种子点为飞点。本发明实施例的深度图像边缘飞点的检测方法、装置及电子设备,能够有效、准确地检测出影响深度图像的飞点,保留了有效的像素点,提高了检测的准确率。
图像目标深度的检测方法、装置、电子设备和存储介质.pdf
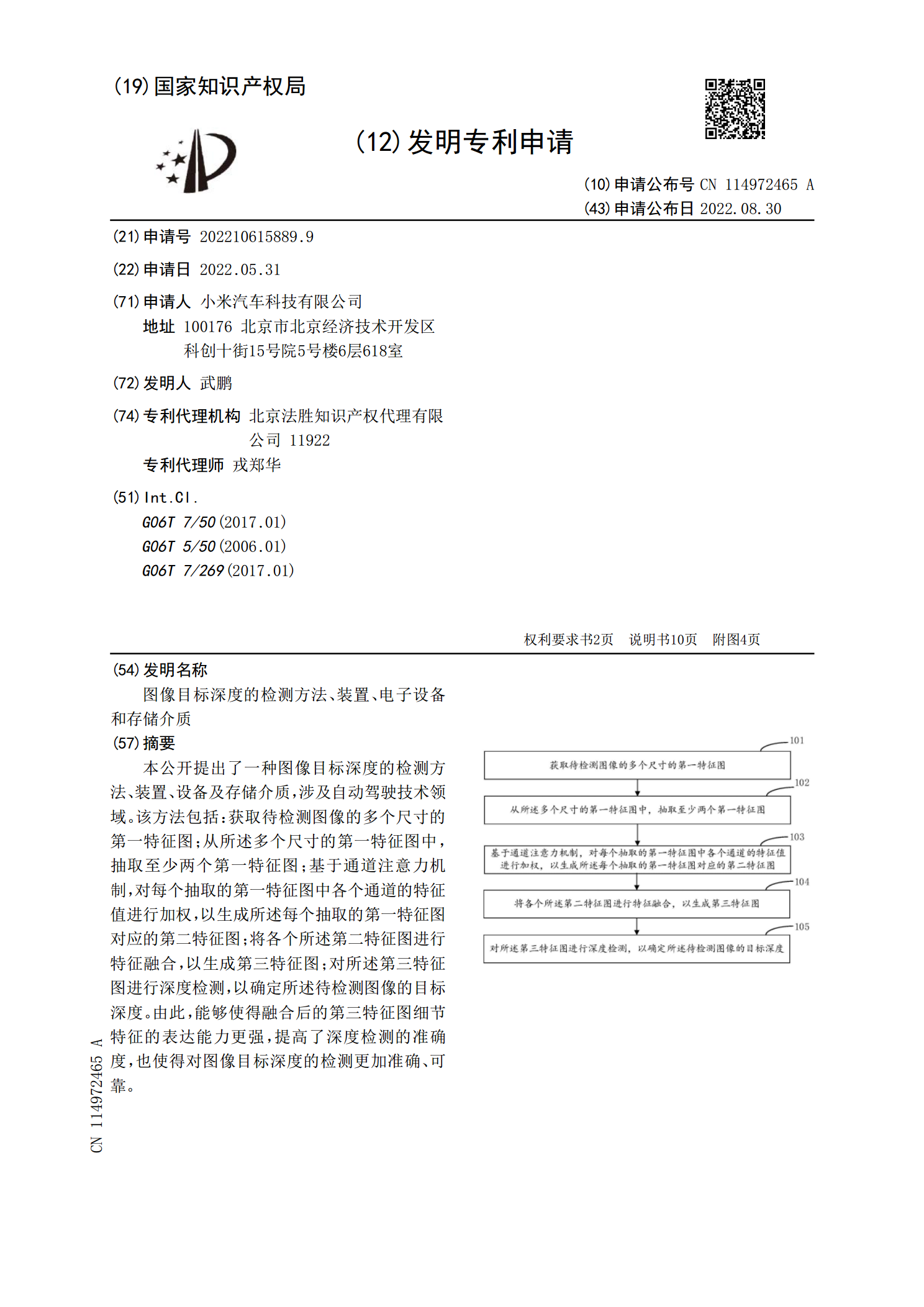
本公开提出了一种图像目标深度的检测方法、装置、设备及存储介质,涉及自动驾驶技术领域。该方法包括:获取待检测图像的多个尺寸的第一特征图;从所述多个尺寸的第一特征图中,抽取至少两个第一特征图;基于通道注意力机制,对每个抽取的第一特征图中各个通道的特征值进行加权,以生成所述每个抽取的第一特征图对应的第二特征图;将各个所述第二特征图进行特征融合,以生成第三特征图;对所述第三特征图进行深度检测,以确定所述待检测图像的目标深度。由此,能够使得融合后的第三特征图细节特征的表达能力更强,提高了深度检测的准确度,也使得对图
图像的边缘修饰方法和边缘修饰装置.pdf
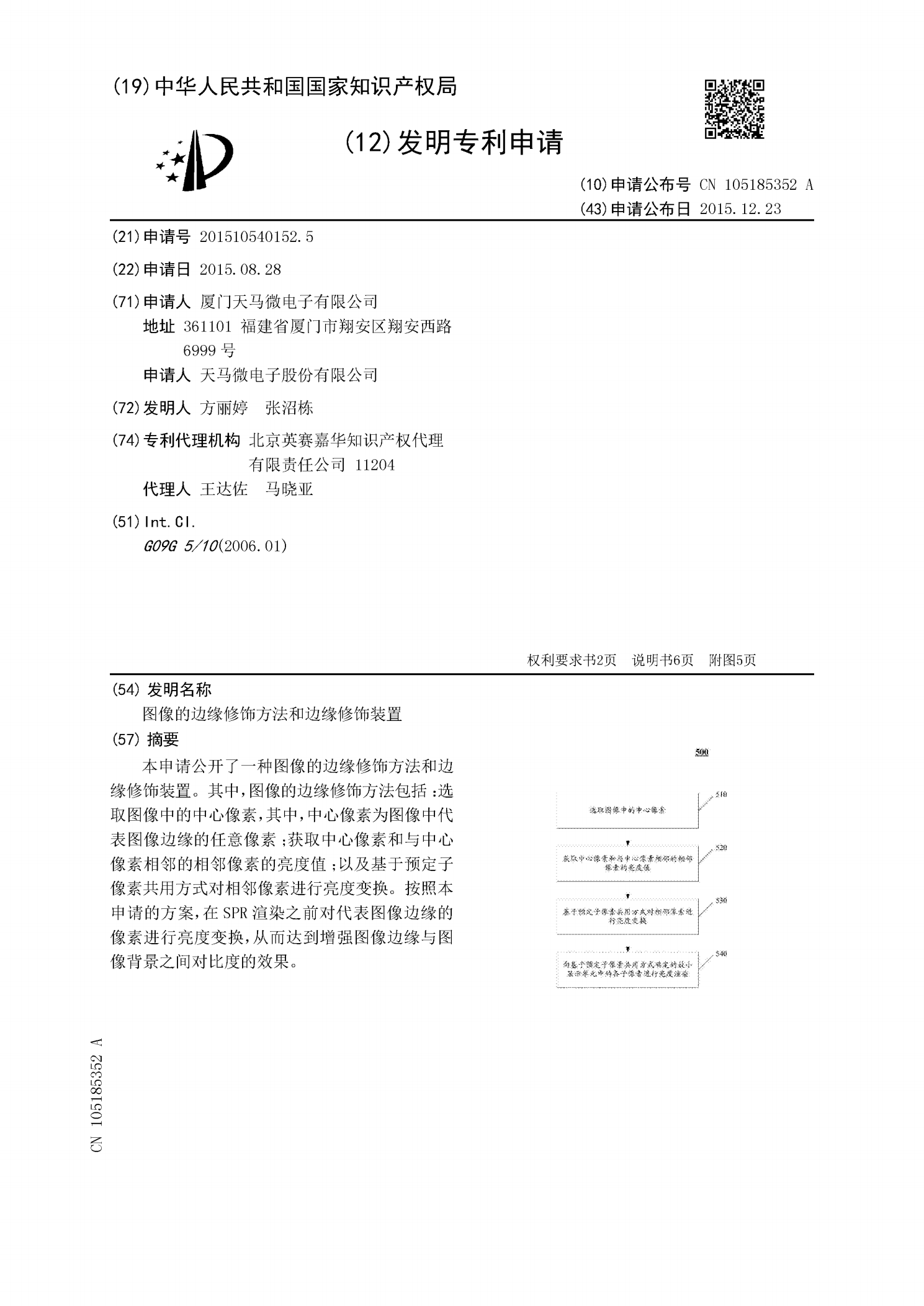
本申请公开了一种图像的边缘修饰方法和边缘修饰装置。其中,图像的边缘修饰方法包括:选取图像中的中心像素,其中,中心像素为图像中代表图像边缘的任意像素;获取中心像素和与中心像素相邻的相邻像素的亮度值;以及基于预定子像素共用方式对相邻像素进行亮度变换。按照本申请的方案,在SPR渲染之前对代表图像边缘的像素进行亮度变换,从而达到增强图像边缘与图像背景之间对比度的效果。
一种图像的边缘检测方法、装置、电子设备及存储介质.pdf
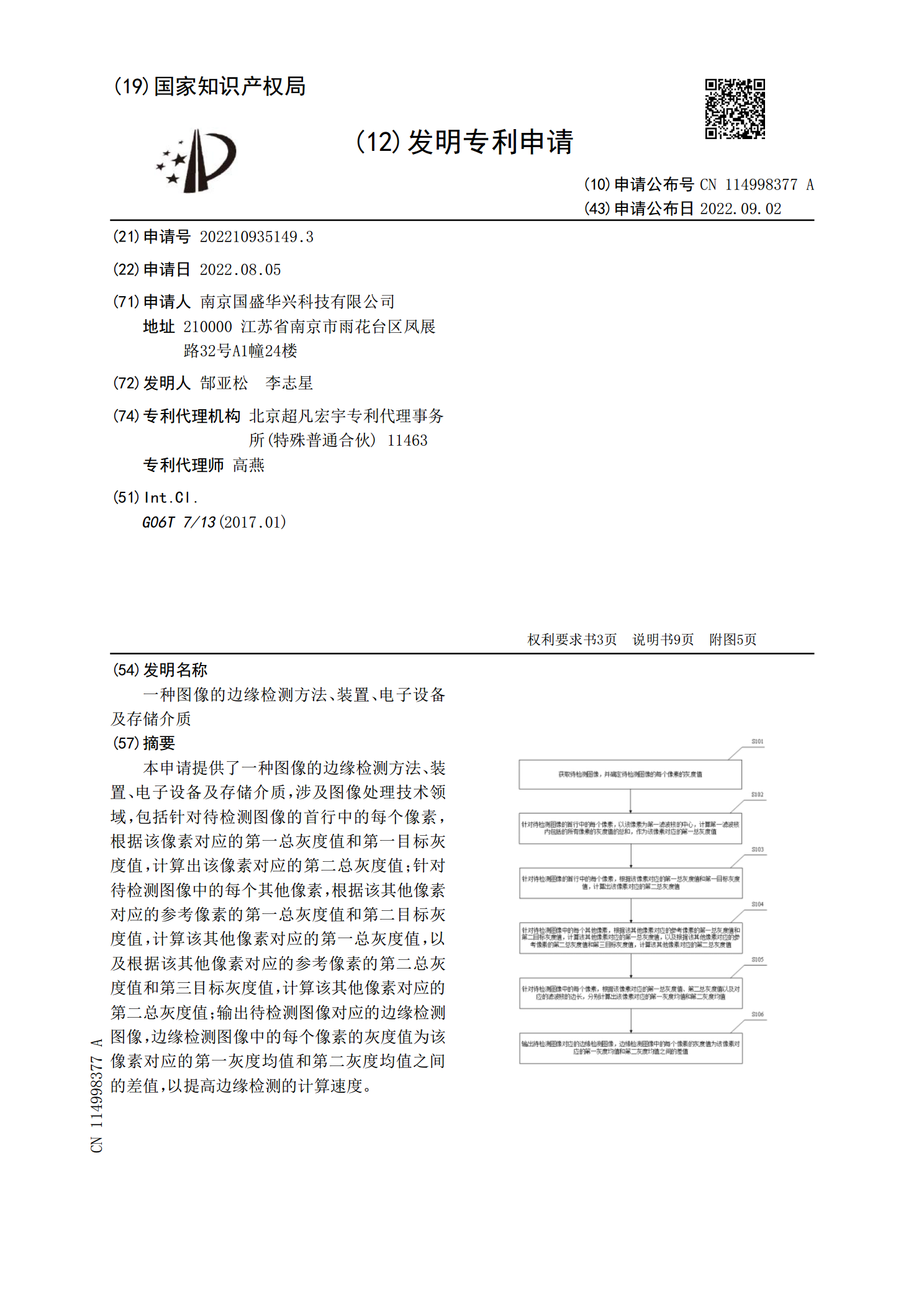
本申请提供了一种图像的边缘检测方法、装置、电子设备及存储介质,涉及图像处理技术领域,包括针对待检测图像的首行中的每个像素,根据该像素对应的第一总灰度值和第一目标灰度值,计算出该像素对应的第二总灰度值;针对待检测图像中的每个其他像素,根据该其他像素对应的参考像素的第一总灰度值和第二目标灰度值,计算该其他像素对应的第一总灰度值,以及根据该其他像素对应的参考像素的第二总灰度值和第三目标灰度值,计算该其他像素对应的第二总灰度值;输出待检测图像对应的边缘检测图像,边缘检测图像中的每个像素的灰度值为该像素对应的第一灰