
一种自动驾驶汽车测距反馈装置.pdf

宜然****找我


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动驾驶汽车测距反馈装置.pdf
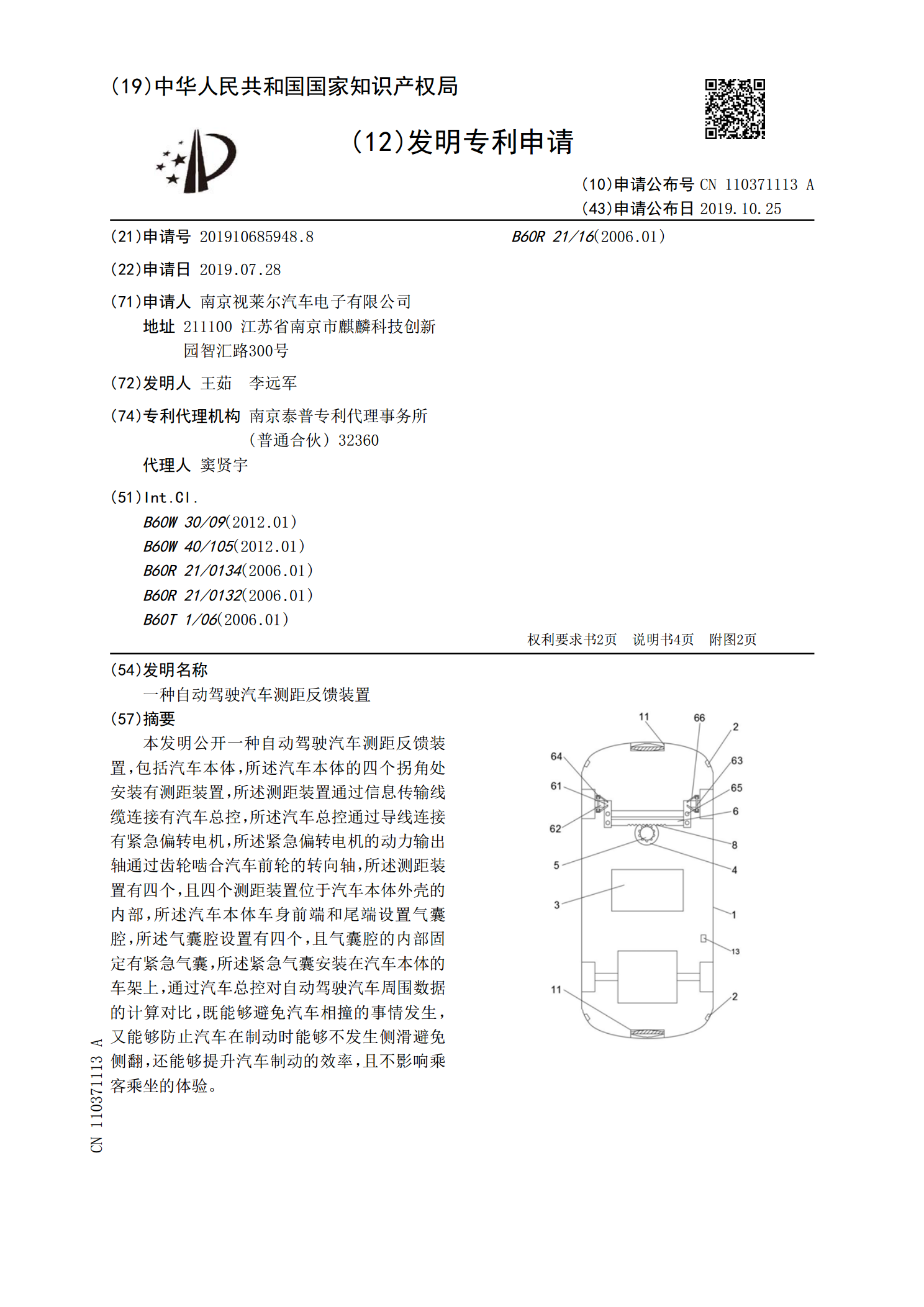
本发明公开一种自动驾驶汽车测距反馈装置,包括汽车本体,所述汽车本体的四个拐角处安装有测距装置,所述测距装置通过信息传输线缆连接有汽车总控,所述汽车总控通过导线连接有紧急偏转电机,所述紧急偏转电机的动力输出轴通过齿轮啮合汽车前轮的转向轴,所述测距装置有四个,且四个测距装置位于汽车本体外壳的内部,所述汽车本体车身前端和尾端设置气囊腔,所述气囊腔设置有四个,且气囊腔的内部固定有紧急气囊,所述紧急气囊安装在汽车本体的车架上,通过汽车总控对自动驾驶汽车周围数据的计算对比,既能够避免汽车相撞的事情发生,又能够防止汽车
一种新型的汽车激光测距装置.pdf
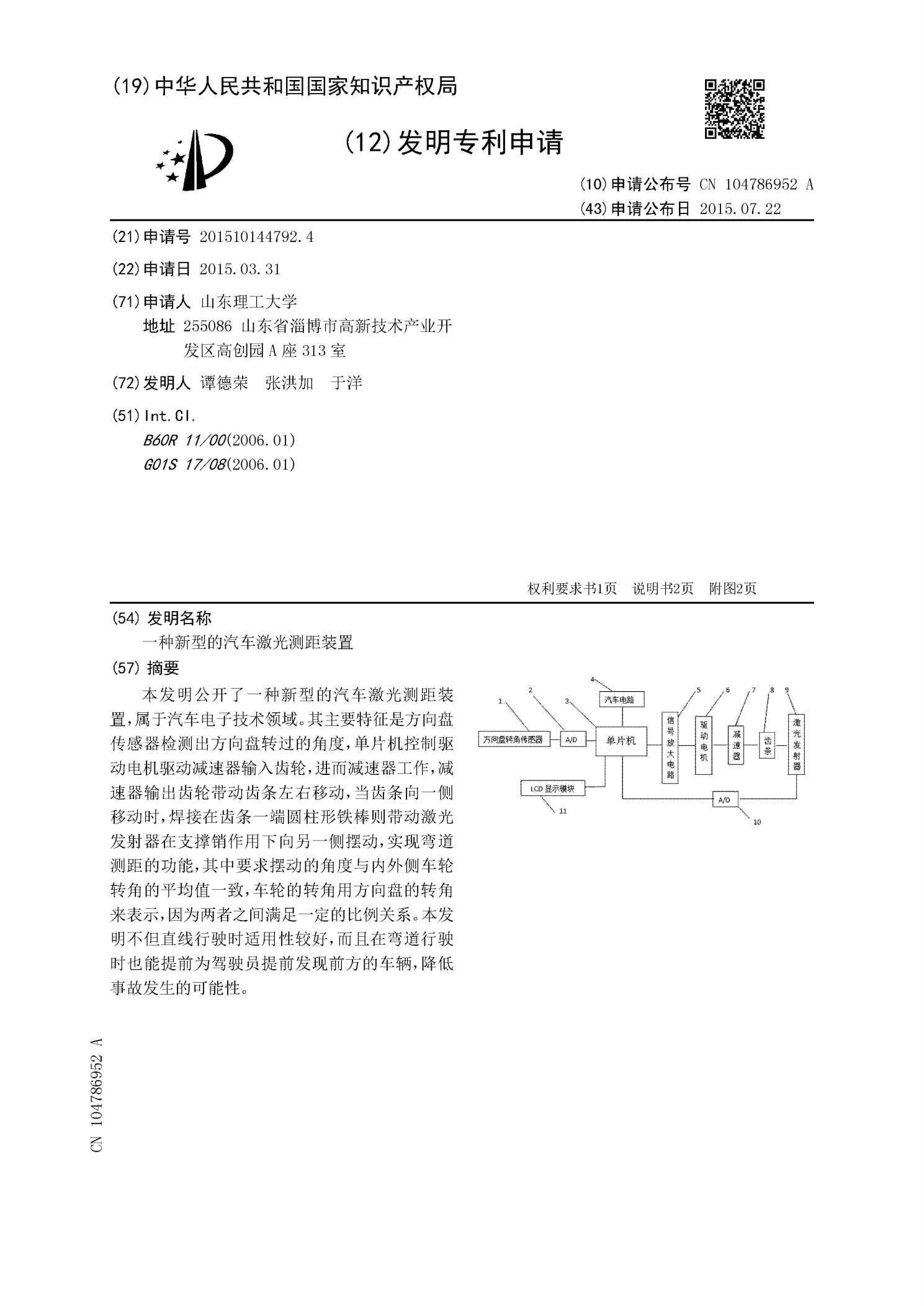
本发明公开了一种新型的汽车激光测距装置,属于汽车电子技术领域。其主要特征是方向盘传感器检测出方向盘转过的角度,单片机控制驱动电机驱动减速器输入齿轮,进而减速器工作,减速器输出齿轮带动齿条左右移动,当齿条向一侧移动时,焊接在齿条一端圆柱形铁棒则带动激光发射器在支撑销作用下向另一侧摆动,实现弯道测距的功能,其中要求摆动的角度与内外侧车轮转角的平均值一致,车轮的转角用方向盘的转角来表示,因为两者之间满足一定的比例关系。本发明不但直线行驶时适用性较好,而且在弯道行驶时也能提前为驾驶员提前发现前方的车辆,降低事故发

一种汽车盲区测距警报装置.pdf
本发明公开了一种汽车盲区测距警报装置,包括安装在汽车的驾驶舱内的控制装置,于汽车的一对前照灯处分别安装有采集汽车前方图像的前置图像采集装置,于汽车的一对后视镜的镜架下分别安装有一对采集汽车侧方图像的侧方图像采集装置,于汽车的一对后照灯处分别安装有后置图像采集装置,前置图像采集装置、侧方图像采集装置、后置图像采集装置与控制装置信号连接。本发明结构新颖,采用多角度设置图像采集装置,通过图像整合修正,克服汽车盲区难题,有利于驾驶员掌握障碍物的实际大小、运动情况、具体位置,大大提高了汽车行驶的安全可靠性,避免事故

一种自动驾驶汽车及其自动刹车装置.pdf
本发明提供一种自动驾驶汽车,包括自动刹车装置,自动刹车装置包括制动总泵、刹车主体、真空助力器和控制单元,刹车主体设在制动总泵和真空助力器之间,刹车主体包括电磁阀、驱动电机、主动蜗杆、主动涡轮、传动轴、从动涡轮和从动蜗杆。驱动电机通过涡轮蜗杆机构直接驱动制动总泵,省去了拉线驱动机构,在蜗轮蜗杆上直接设计了压力和位移检测设备,并把检测传感器集成在设备内部,安装方便;驱动电机通过涡轮蜗杆机构直接驱动制动总泵,产生系统压力,没有改变原车结构,省去了改装油路的风险;驱动电机通过蜗轮蜗杆机构直接驱动制动总泵,产生系统
汽车停车用防撞测距装置及其测距方法.pdf
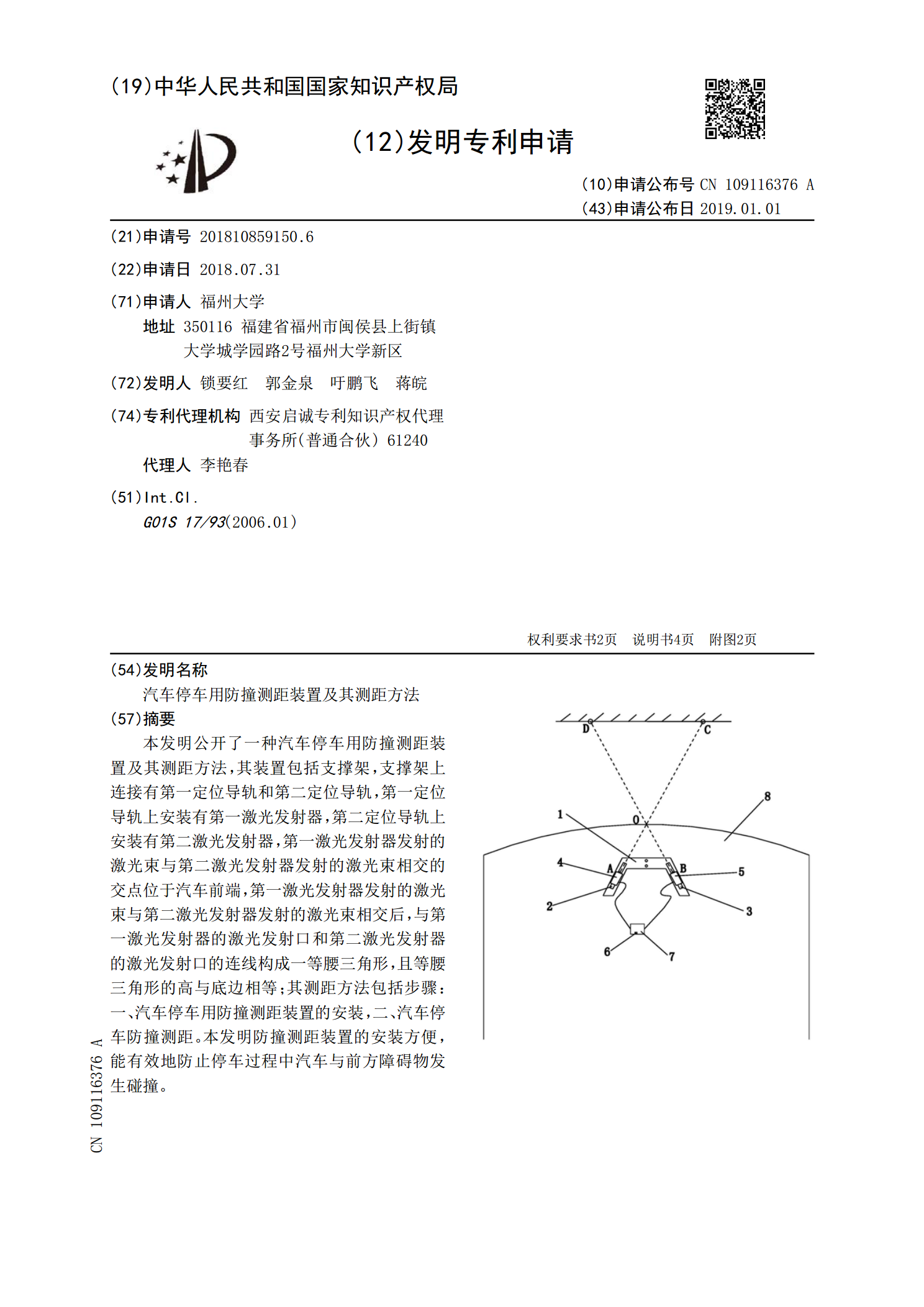
本发明公开了一种汽车停车用防撞测距装置及其测距方法,其装置包括支撑架,支撑架上连接有第一定位导轨和第二定位导轨,第一定位导轨上安装有第一激光发射器,第二定位导轨上安装有第二激光发射器,第一激光发射器发射的激光束与第二激光发射器发射的激光束相交的交点位于汽车前端,第一激光发射器发射的激光束与第二激光发射器发射的激光束相交后,与第一激光发射器的激光发射口和第二激光发射器的激光发射口的连线构成一等腰三角形,且等腰三角形的高与底边相等;其测距方法包括步骤:一、汽车停车用防撞测距装置的安装,二、汽车停车防撞测距。本