
一种基于分布式智能飞轮的航天器姿态控制方法.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于分布式智能飞轮的航天器姿态控制方法.pdf
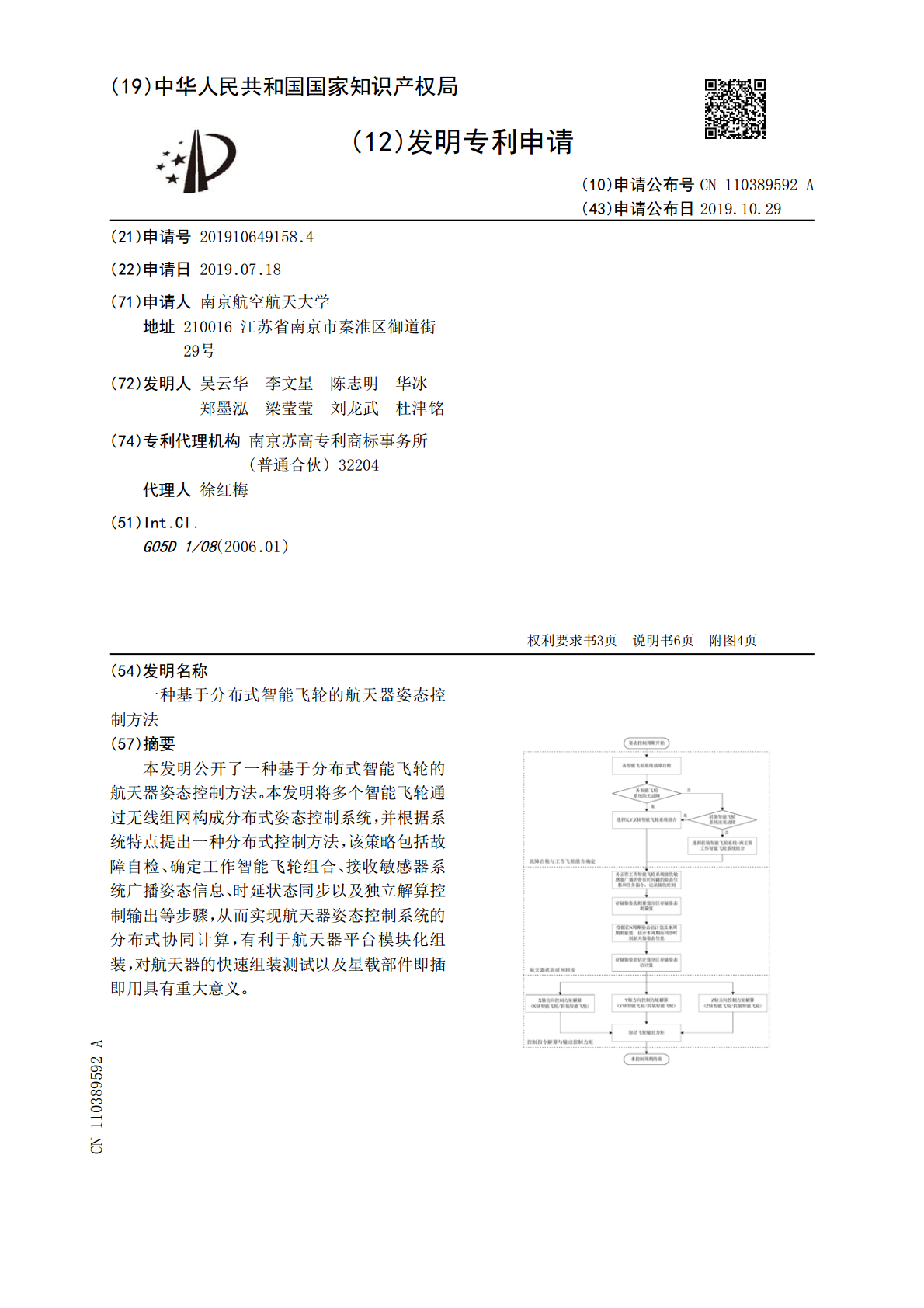
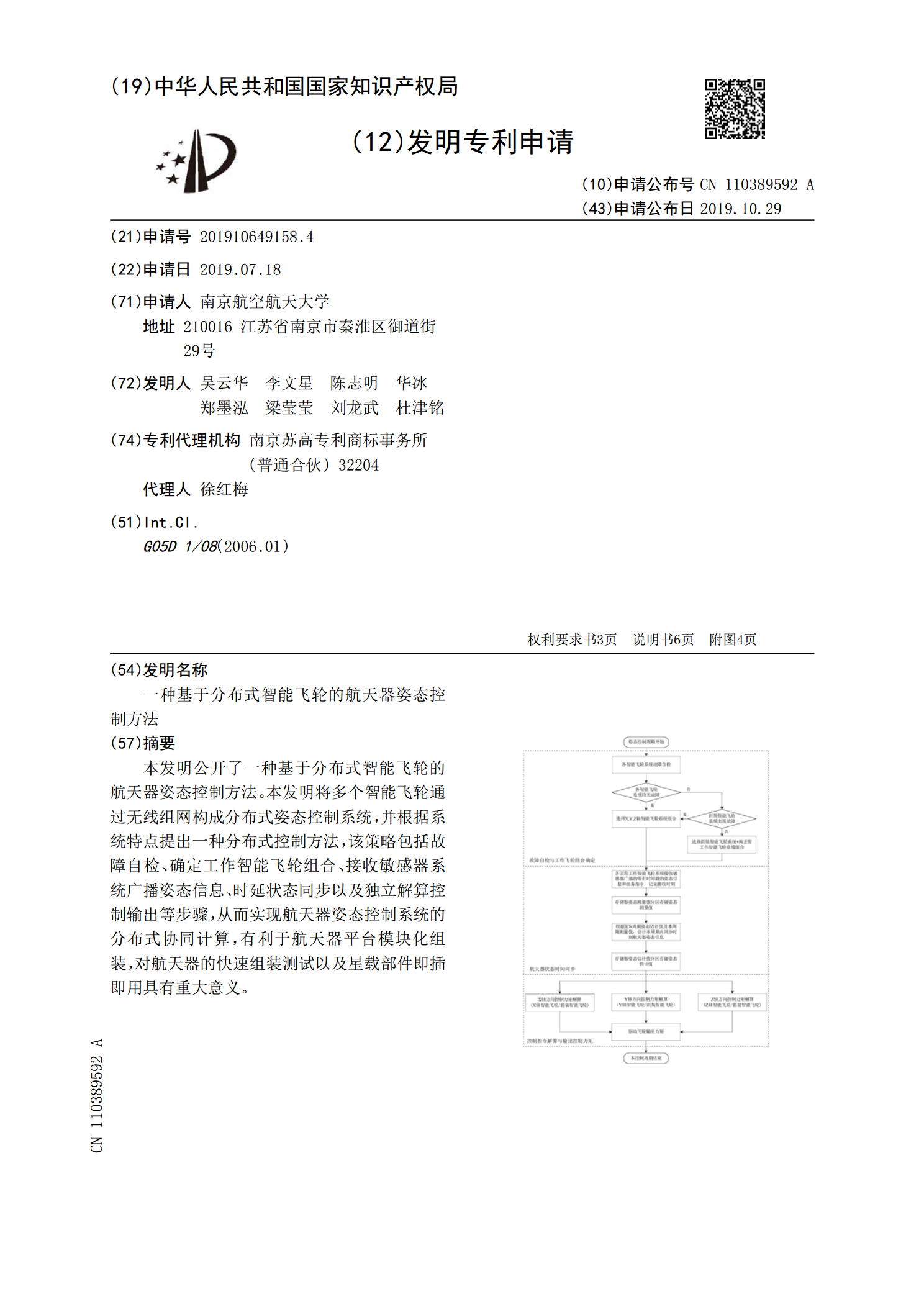
本发明公开了一种基于分布式智能飞轮的航天器姿态控制方法。本发明将多个智能飞轮通过无线组网构成分布式姿态控制系统,并根据系统特点提出一种分布式控制方法,该策略包括故障自检、确定工作智能飞轮组合、接收敏感器系统广播姿态信息、时延状态同步以及独立解算控制输出等步骤,从而实现航天器姿态控制系统的分布式协同计算,有利于航天器平台模块化组装,对航天器的快速组装测试以及星载部件即插即用具有重大意义。
一种航天器姿态控制智能反作用飞轮及其控制方法.pdf
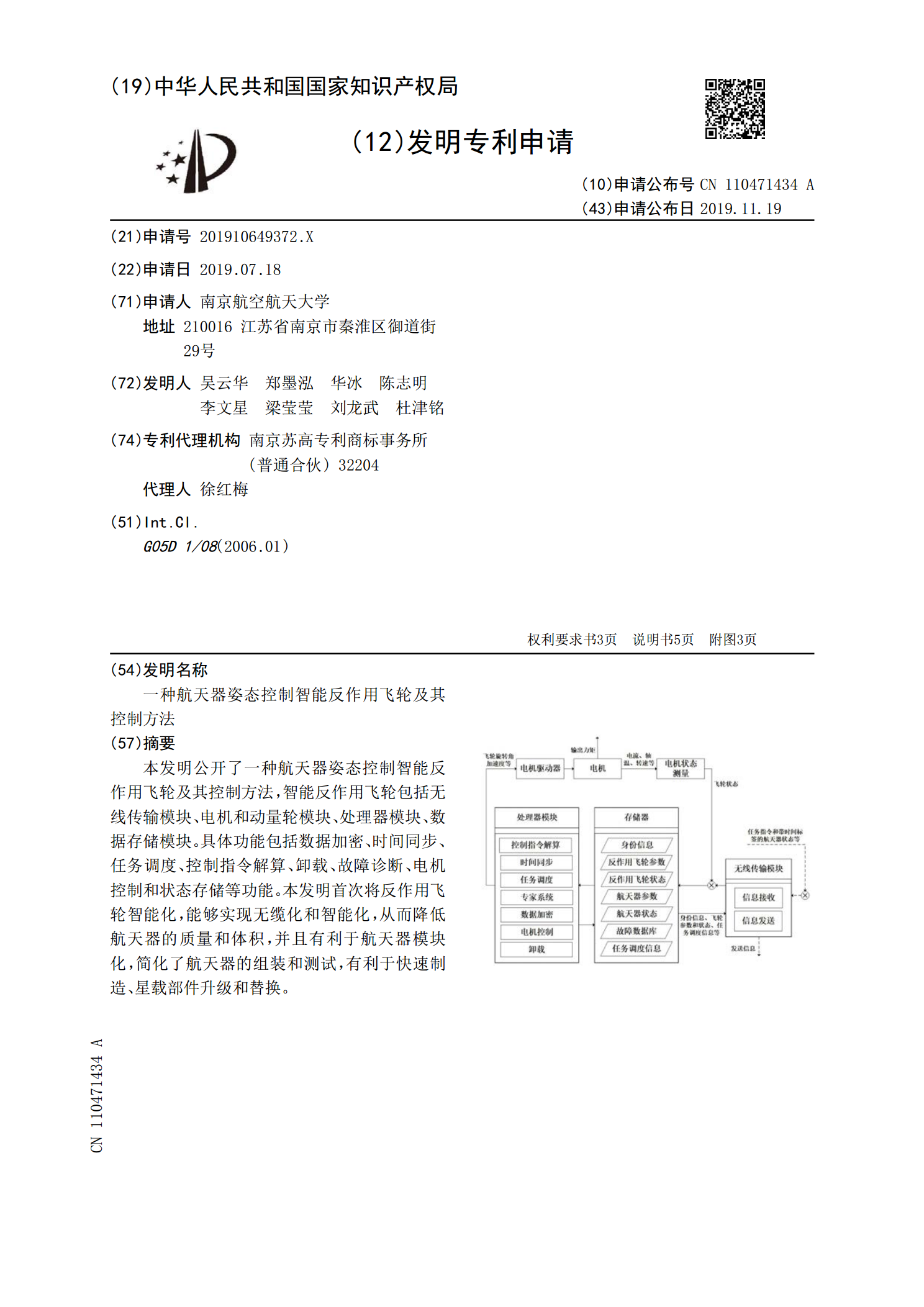
本发明公开了一种航天器姿态控制智能反作用飞轮及其控制方法,智能反作用飞轮包括无线传输模块、电机和动量轮模块、处理器模块、数据存储模块。具体功能包括数据加密、时间同步、任务调度、控制指令解算、卸载、故障诊断、电机控制和状态存储等功能。本发明首次将反作用飞轮智能化,能够实现无缆化和智能化,从而降低航天器的质量和体积,并且有利于航天器模块化,简化了航天器的组装和测试,有利于快速制造、星载部件升级和替换。
一种应用飞轮群的欠驱动航天器姿态控制方法.pdf
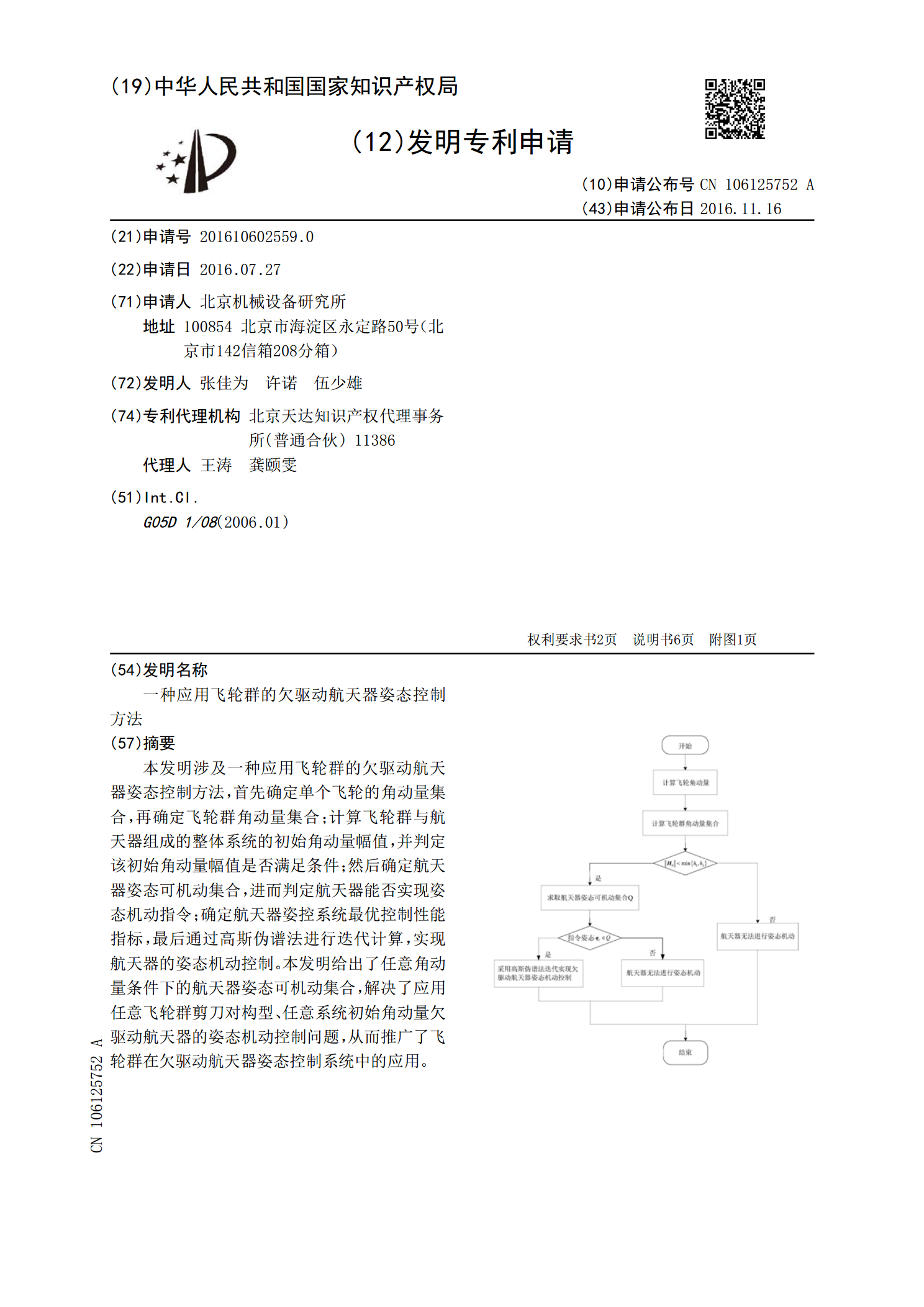
本发明涉及一种应用飞轮群的欠驱动航天器姿态控制方法,首先确定单个飞轮的角动量集合,再确定飞轮群角动量集合;计算飞轮群与航天器组成的整体系统的初始角动量幅值,并判定该初始角动量幅值是否满足条件;然后确定航天器姿态可机动集合,进而判定航天器能否实现姿态机动指令;确定航天器姿控系统最优控制性能指标,最后通过高斯伪谱法进行迭代计算,实现航天器的姿态机动控制。本发明给出了任意角动量条件下的航天器姿态可机动集合,解决了应用任意飞轮群剪刀对构型、任意系统初始角动量欠驱动航天器的姿态机动控制问题,从而推广了飞轮群在欠驱动

一种分布式航天器的姿态协同跟踪控制方法.pdf
本发明公开了一种分布式航天器的姿态协同跟踪控制方法,涉及航天器编队飞行技术领域;航天器编队成员之间采用具有较少通信路径且仅有部分跟随者可以获得领航者信息的通信拓扑结构,为了获得领航者信息,设计分布式有限时间状态观测器对领航者信息进行观测;采用快速非奇异终端滑模控制算法使编队航天器姿态快速协同和跟踪、输入饱和函数对控制力矩进行限幅以及自适应算法对惯量变化和外界干扰进行自适应补偿等,设计了一种分布式航天器编队自适应有限时间姿态协同跟踪控制方法。本发明对通信资源、输入饱和、快速收敛性、外界干扰和惯量不确定性的考

一种考虑飞轮不确定性的航天器姿态控制方法.pdf
本发明公开了一种考虑飞轮不确定性的航天器姿态控制方法,包括以下步骤:考虑追踪航天器的姿态控制机构飞轮存在不确定性的情况下,建立追踪航天器与自由翻滚失效航天器之间的姿态跟踪动力学模型;设计非奇异固定时间抗退绕滑模面;构建追踪航天器的自适应容错滑模姿态跟踪控制器,并且给出该控制器可处理的飞轮安装偏差角范围。本发明的控制方法具有响应时间快,控制器鲁棒性强,节省能量等特性,适合应用于存在飞轮不确定性(安装偏差和故障)的追踪航天器完成对自由翻滚失效航天器观测的姿态跟踪控制任务。