
一种航天器姿态控制智能反作用飞轮及其控制方法.pdf

Wi****m7

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种航天器姿态控制智能反作用飞轮及其控制方法.pdf
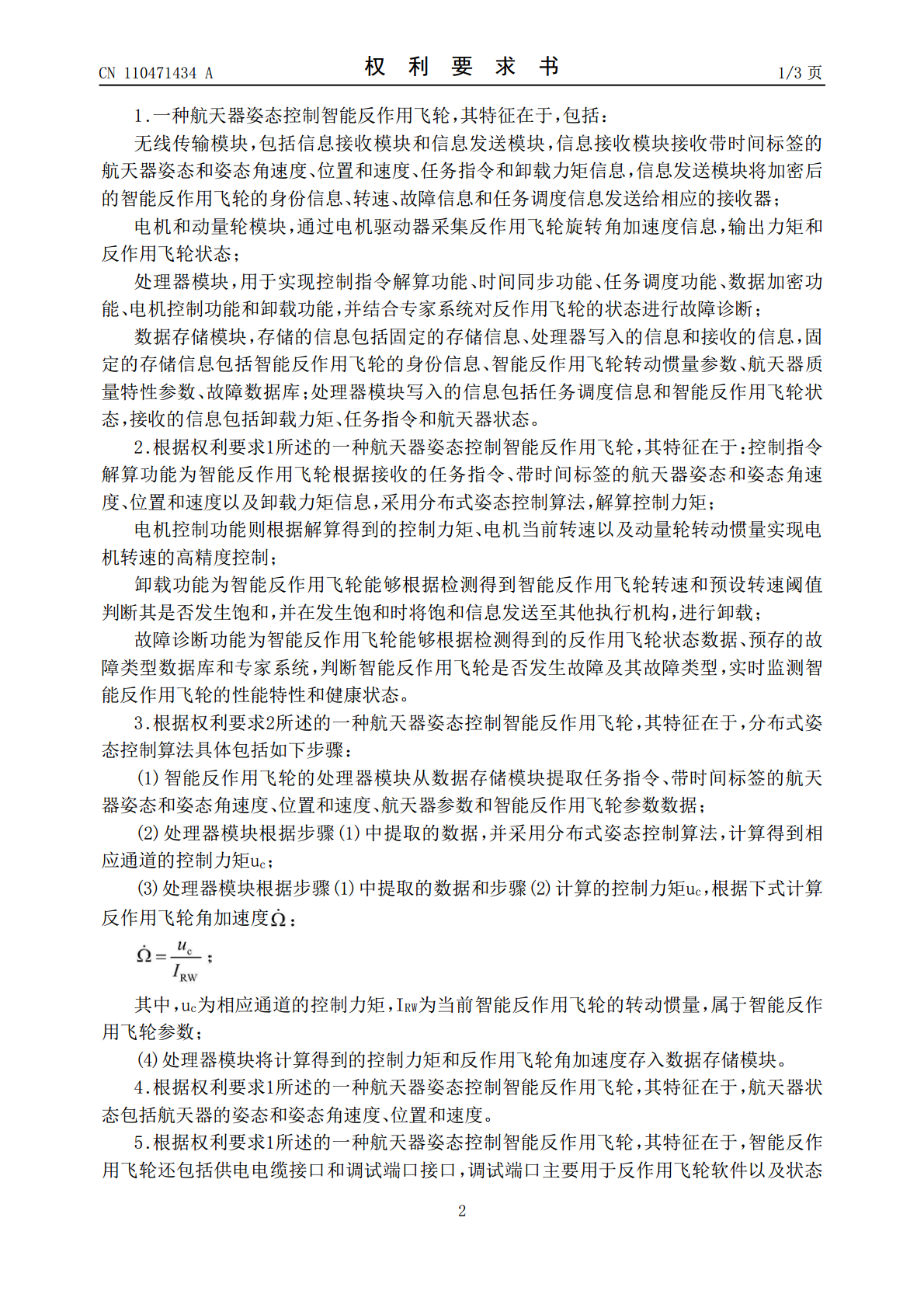
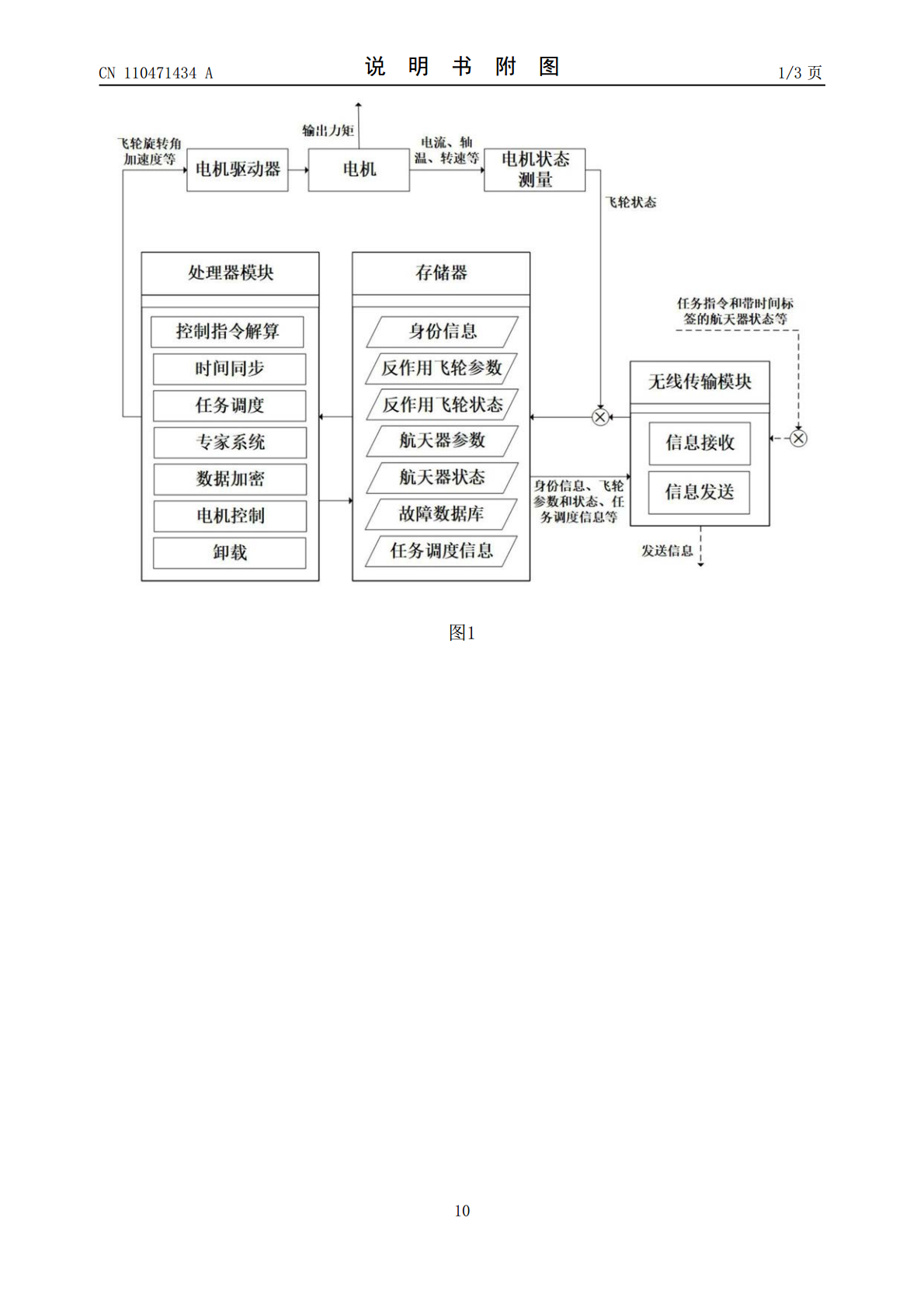
本发明公开了一种航天器姿态控制智能反作用飞轮及其控制方法,智能反作用飞轮包括无线传输模块、电机和动量轮模块、处理器模块、数据存储模块。具体功能包括数据加密、时间同步、任务调度、控制指令解算、卸载、故障诊断、电机控制和状态存储等功能。本发明首次将反作用飞轮智能化,能够实现无缆化和智能化,从而降低航天器的质量和体积,并且有利于航天器模块化,简化了航天器的组装和测试,有利于快速制造、星载部件升级和替换。
一种考虑反作用飞轮特性及功率受限的航天器姿态控制方法.pdf
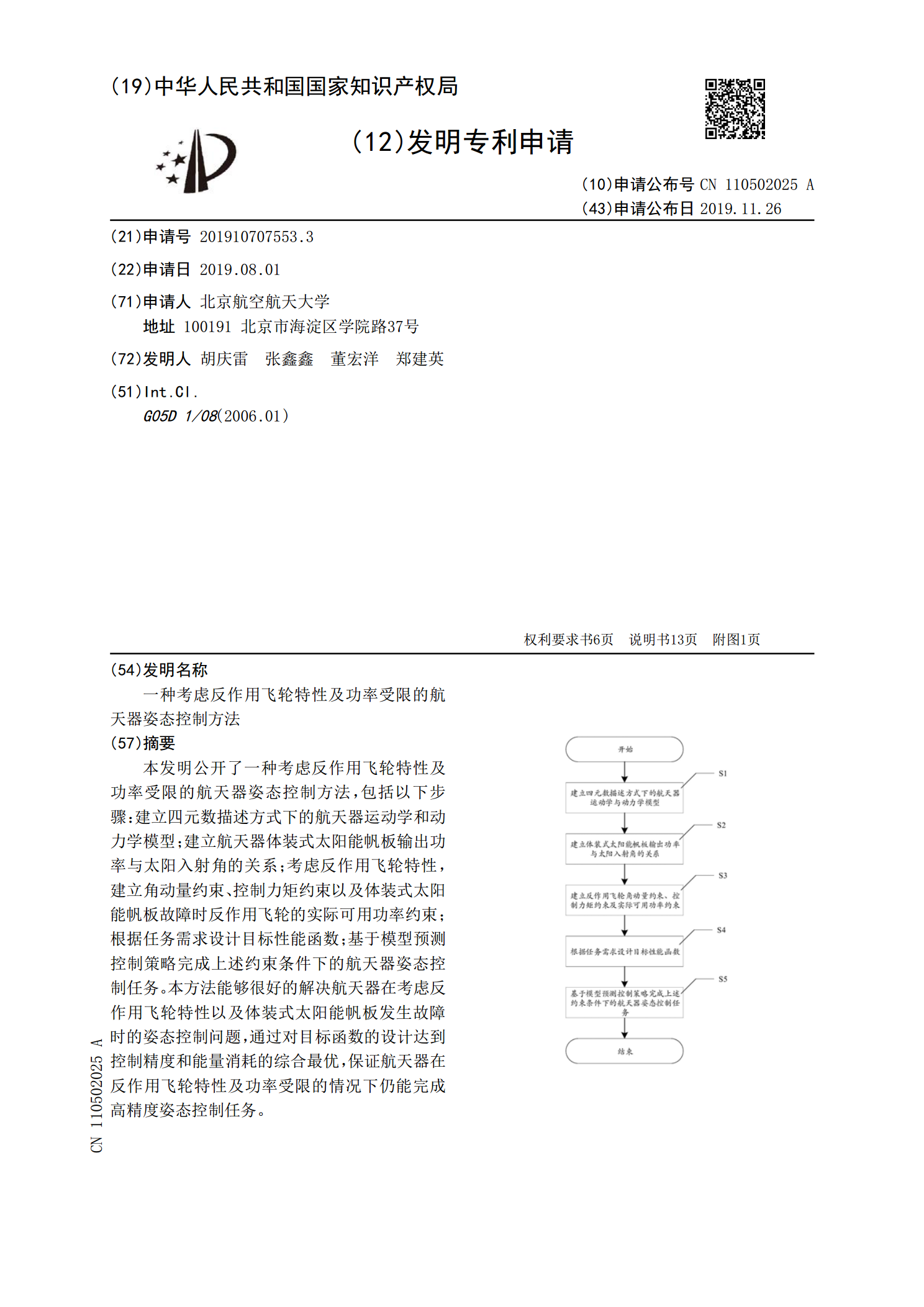
本发明公开了一种考虑反作用飞轮特性及功率受限的航天器姿态控制方法,包括以下步骤:建立四元数描述方式下的航天器运动学和动力学模型;建立航天器体装式太阳能帆板输出功率与太阳入射角的关系;考虑反作用飞轮特性,建立角动量约束、控制力矩约束以及体装式太阳能帆板故障时反作用飞轮的实际可用功率约束;根据任务需求设计目标性能函数;基于模型预测控制策略完成上述约束条件下的航天器姿态控制任务。本方法能够很好的解决航天器在考虑反作用飞轮特性以及体装式太阳能帆板发生故障时的姿态控制问题,通过对目标函数的设计达到控制精度和能量消耗
一种基于分布式智能飞轮的航天器姿态控制方法.pdf
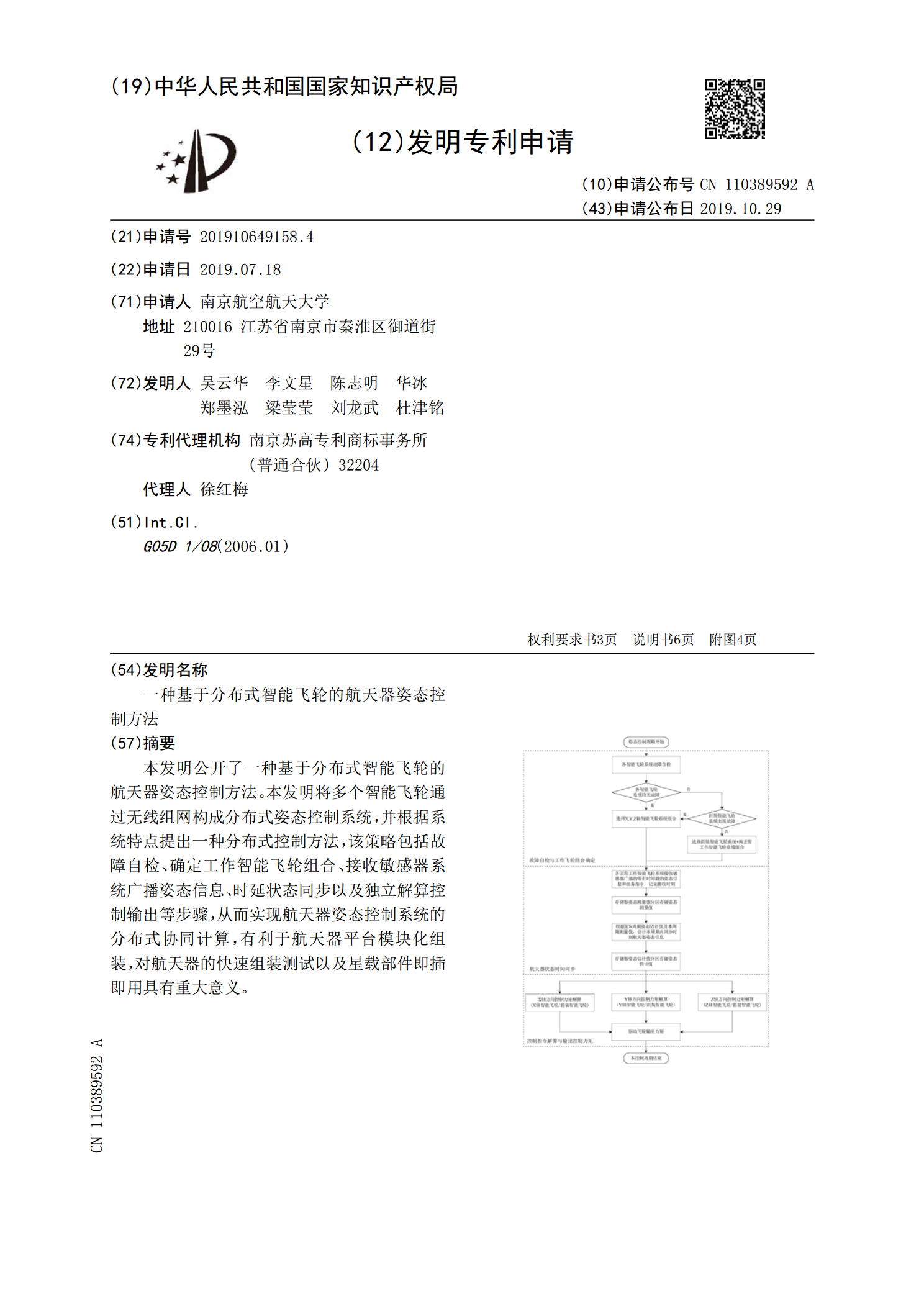
本发明公开了一种基于分布式智能飞轮的航天器姿态控制方法。本发明将多个智能飞轮通过无线组网构成分布式姿态控制系统,并根据系统特点提出一种分布式控制方法,该策略包括故障自检、确定工作智能飞轮组合、接收敏感器系统广播姿态信息、时延状态同步以及独立解算控制输出等步骤,从而实现航天器姿态控制系统的分布式协同计算,有利于航天器平台模块化组装,对航天器的快速组装测试以及星载部件即插即用具有重大意义。
一种应用飞轮群的欠驱动航天器姿态控制方法.pdf
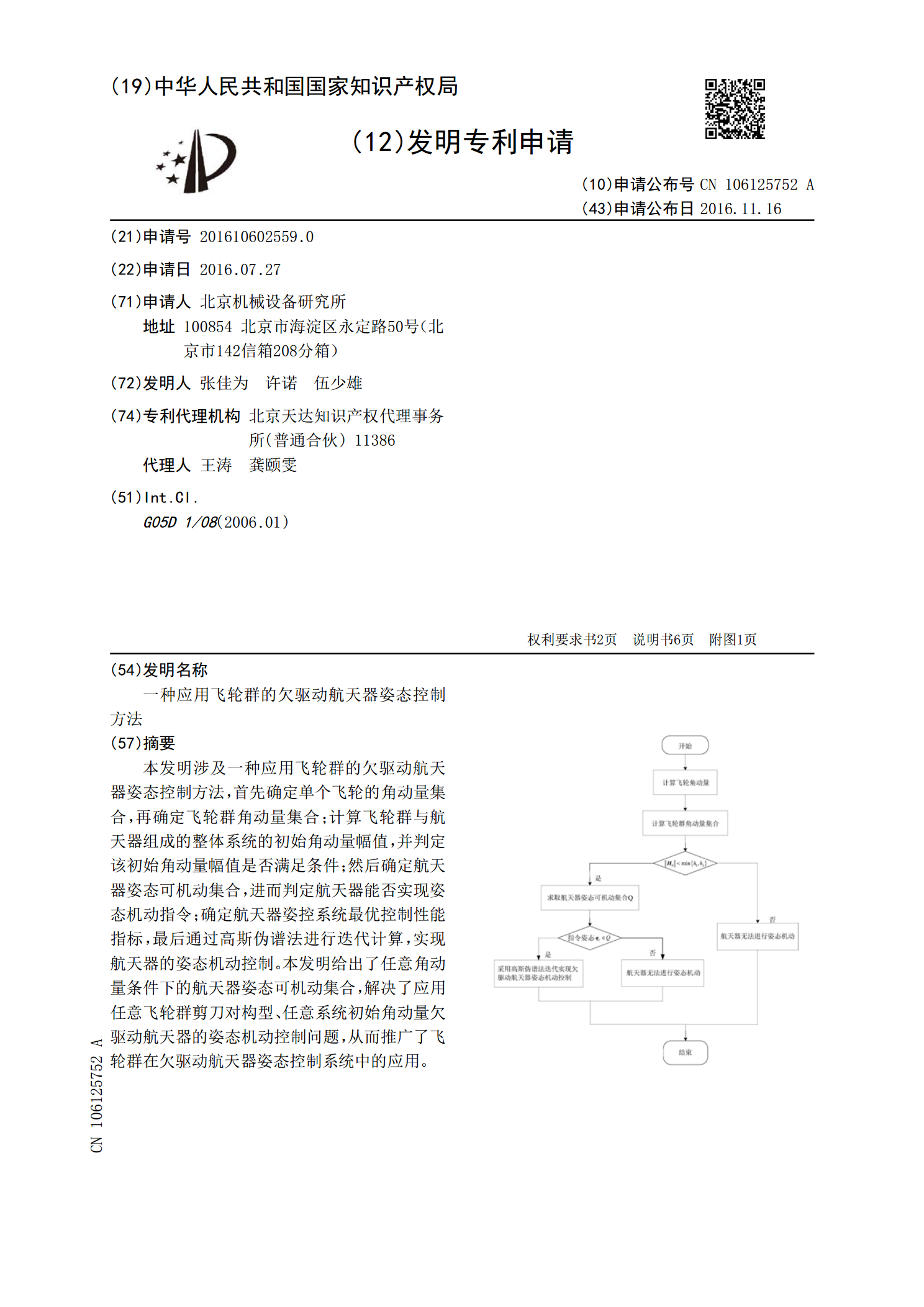
本发明涉及一种应用飞轮群的欠驱动航天器姿态控制方法,首先确定单个飞轮的角动量集合,再确定飞轮群角动量集合;计算飞轮群与航天器组成的整体系统的初始角动量幅值,并判定该初始角动量幅值是否满足条件;然后确定航天器姿态可机动集合,进而判定航天器能否实现姿态机动指令;确定航天器姿控系统最优控制性能指标,最后通过高斯伪谱法进行迭代计算,实现航天器的姿态机动控制。本发明给出了任意角动量条件下的航天器姿态可机动集合,解决了应用任意飞轮群剪刀对构型、任意系统初始角动量欠驱动航天器的姿态机动控制问题,从而推广了飞轮群在欠驱动

利用充液变惯量飞轮控制航天器姿态的方法及其执行机构.pdf
本发明是一种利用充液变惯量飞轮控制航天器姿态的方法及其执行机构。执行结构包括真空框架、飞轮、电机、轴承和控制机构,控制机构对电机的转速和充液腔内的液体排放进行控制,飞轮充液腔内的液体通过轴向导管和径向导管注入和排空。本发明方法在航天器相互垂直的三轴上,分别安装了一个执行机构,各执行结构的飞轮对称轴与所在的坐标轴重合,根据动量矩定理得到三轴控制力矩与执行机构动量矩变化律的关系,根据当前飞轮的转速值与转速门限值的大小,调整飞轮充液腔中液体的充放,不断实时调整调整航天器的姿态控制力矩,使与期望姿态重合。本发明避