
具有平衡结构的器械机械臂.pdf

春岚****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有平衡结构的器械机械臂.pdf
本发明涉及一种具有平衡结构的器械机械臂,其解决了现有微创手术机器人系统中器械机械臂的驱动电机负载过高,影响关节运动精度和降低驱动电机寿命的技术问题,其包括L型臂杆和第一连杆、驱动电机、第一驱动轮、第二驱动轮、传动杆、气弹簧、曲柄连杆和驱动转轴,倒L型臂杆设有水平部和竖直部,驱动电机与倒L型臂杆的水平部连接,第一驱动轮与驱动电机的输出轴固定连接,驱动转轴通过轴承与倒L型臂杆的竖直部转动连接,第一连杆与驱动转轴的一端固定连接,驱动转轴的另一端与第二驱动轮固定连接;传动杆的一端与第一驱动轮铰接,另一端与第二驱动

一种具有平衡装置的重载机械臂.pdf
本发明公开了一种具有平衡装置的重载机械臂,包括机械臂、竖直轴、底座和副支撑装置;平衡装置包括丝杠支撑导向座、平衡弹簧和弹簧下部支撑座;内固定定位立柱固定在底座上;机械臂、外升降立柱、驱动电机及减速机和丝杠安装成一体;外升降立柱套设在内固定定位立柱上并且上下滑动设置;丝杠螺母固定在内固定定位立柱内;平衡装置位于内固定定位立柱内并且设置在底座和丝杠之间;发明优点:将平衡装置设计在垂直轴内部,且平衡力与负载在同一竖直中心线上;整体质量较轻并且负载较大;副支撑装置使承重支撑点靠近竖直轴,同时承受一定的重量,有利于

具有参数区间不确定的机械臂结构优化.docx
具有参数区间不确定的机械臂结构优化机械臂结构优化是一项重要的研究领域,其目标是通过改变机械臂的设计参数,使其在给定的工作条件下获得最佳性能。然而,在实际应用中,由于各种因素的影响,机械臂的参数值通常是具有不确定性的。因此,如何在参数不确定的情况下进行机械臂结构优化成为一个具有挑战性的问题。参数不确定性可以来自多个方面,包括制造误差、材料属性的波动、工作环境的不确定性等。这些不确定性会导致机械臂在不同的工况下表现出不同的性能。因此,我们需要考虑参数的区间范围,以及参数的分布概率,来对机械臂结构进行优化。在处
弯曲结构、机械臂及机械臂系统.pdf
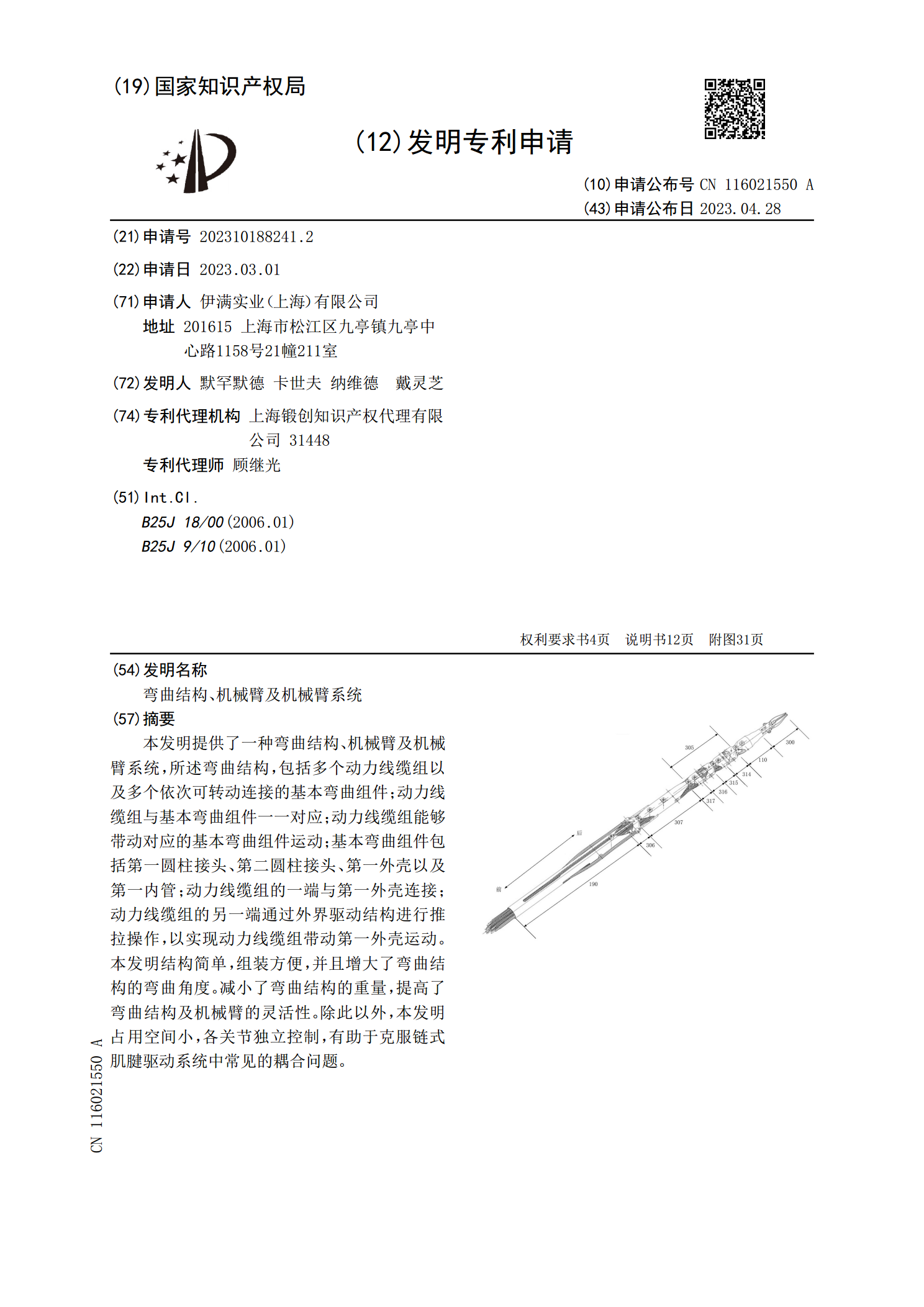
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116021550A(43)申请公布日2023.04.28(21)申请号202310188241.2(22)申请日2023.03.01(71)申请人伊满实业(上海)有限公司地址201615上海市松江区九亭镇九亭中心路1158号21幢211室(72)发明人默罕默德卡世夫纳维德戴灵芝(74)专利代理机构上海锻创知识产权代理有限公司31448专利代理师顾继光(51)Int.Cl.B25J18/00(2006.01)B25J9/10(2006.01)

具有机械臂的货车.pdf
本发明涉及一种具有机械臂的货车。本发明提供一种具有机械臂的货车,可以快速装卸货物,也可以运输大型单体货物。本发明包括大型货车、设置在货车尾部的基座和机械臂,机械臂包括驱动件和依次转动连接的基座回转支撑、主臂、折臂、前后摆件、左右摆件、吊具回转支撑和固定在吊具回转支撑底部的吊具;基座回转支撑设置在基座上。