
悬挂驱动装置.pdf

努力****冰心

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

悬挂驱动装置.pdf
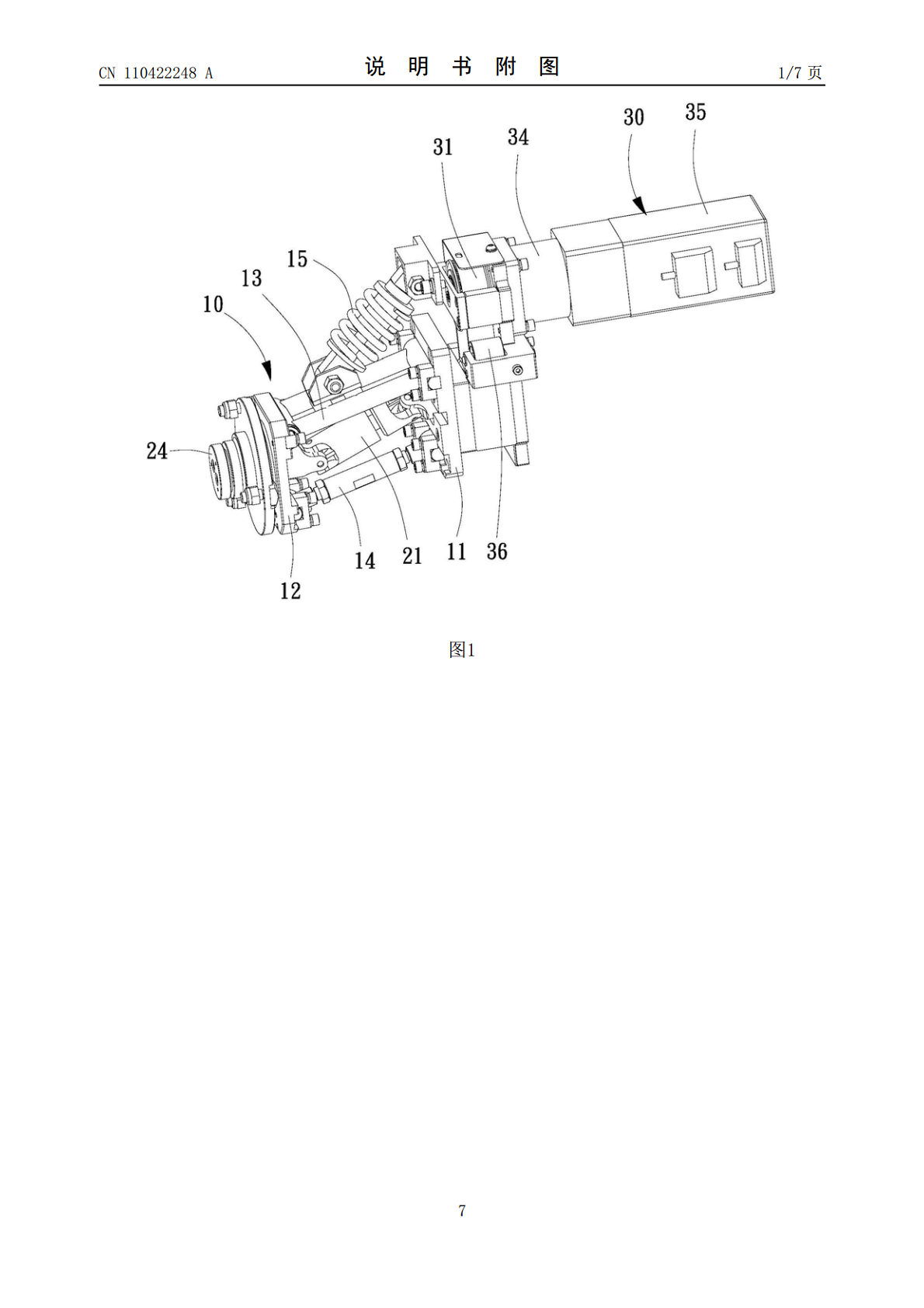
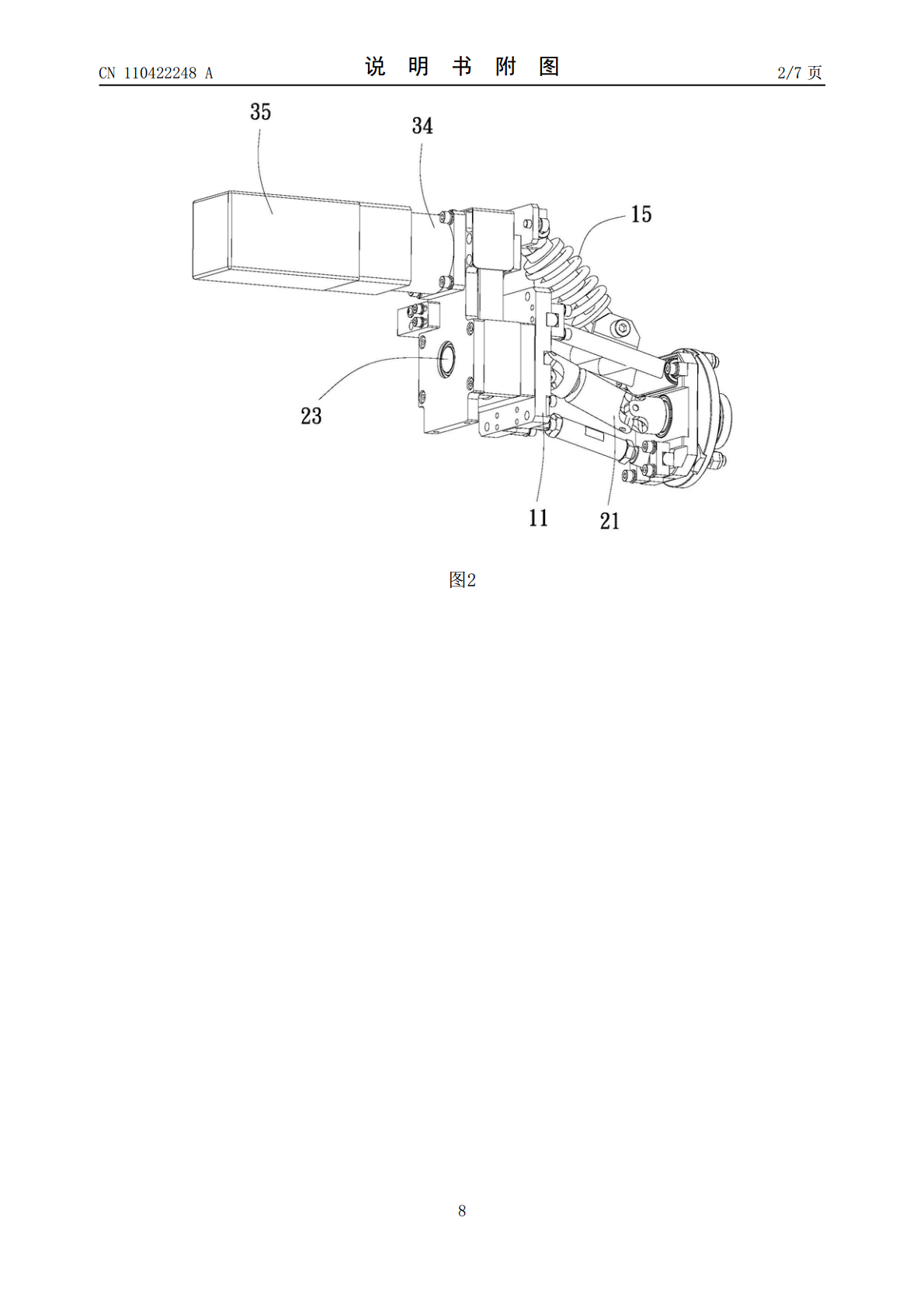
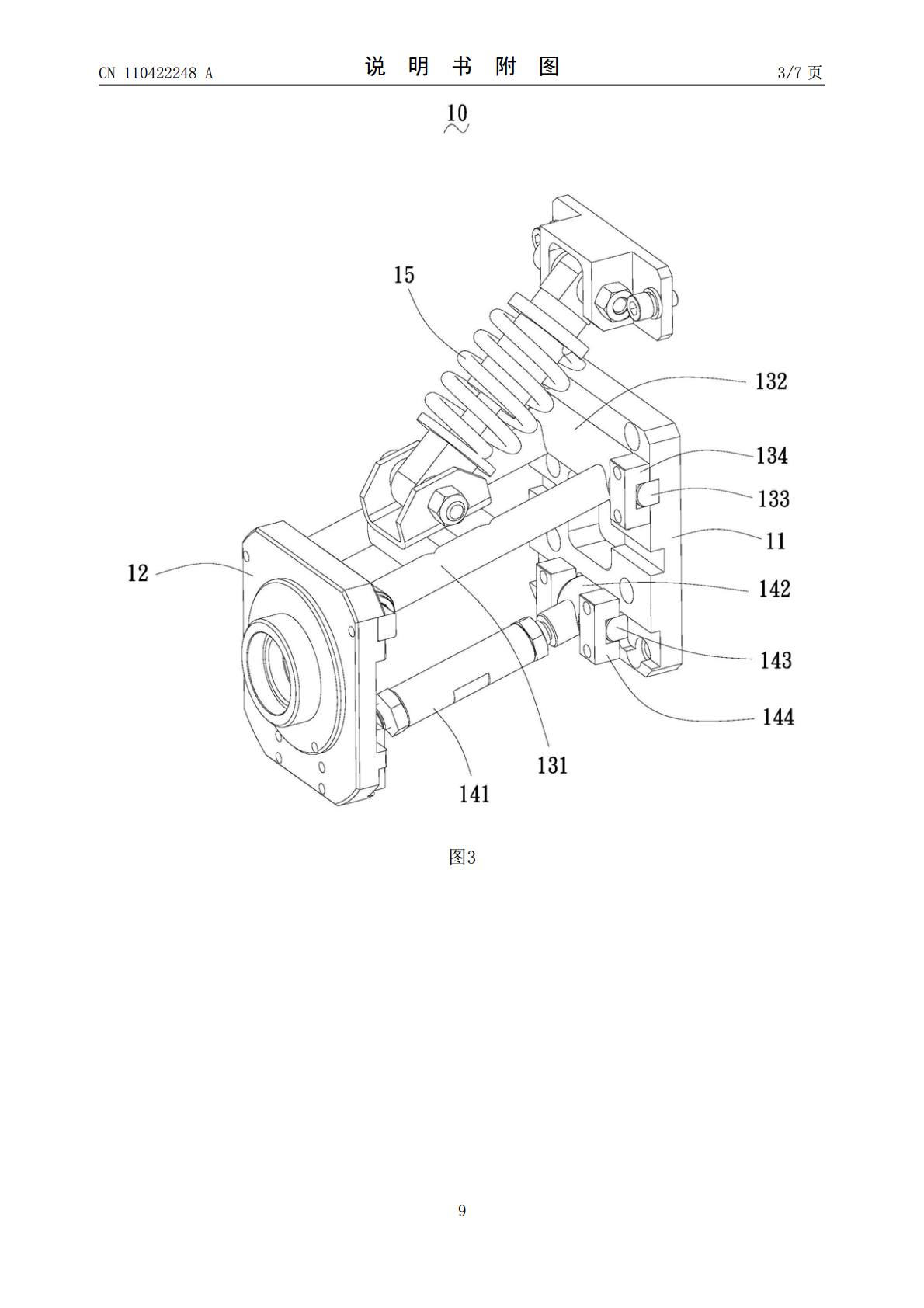
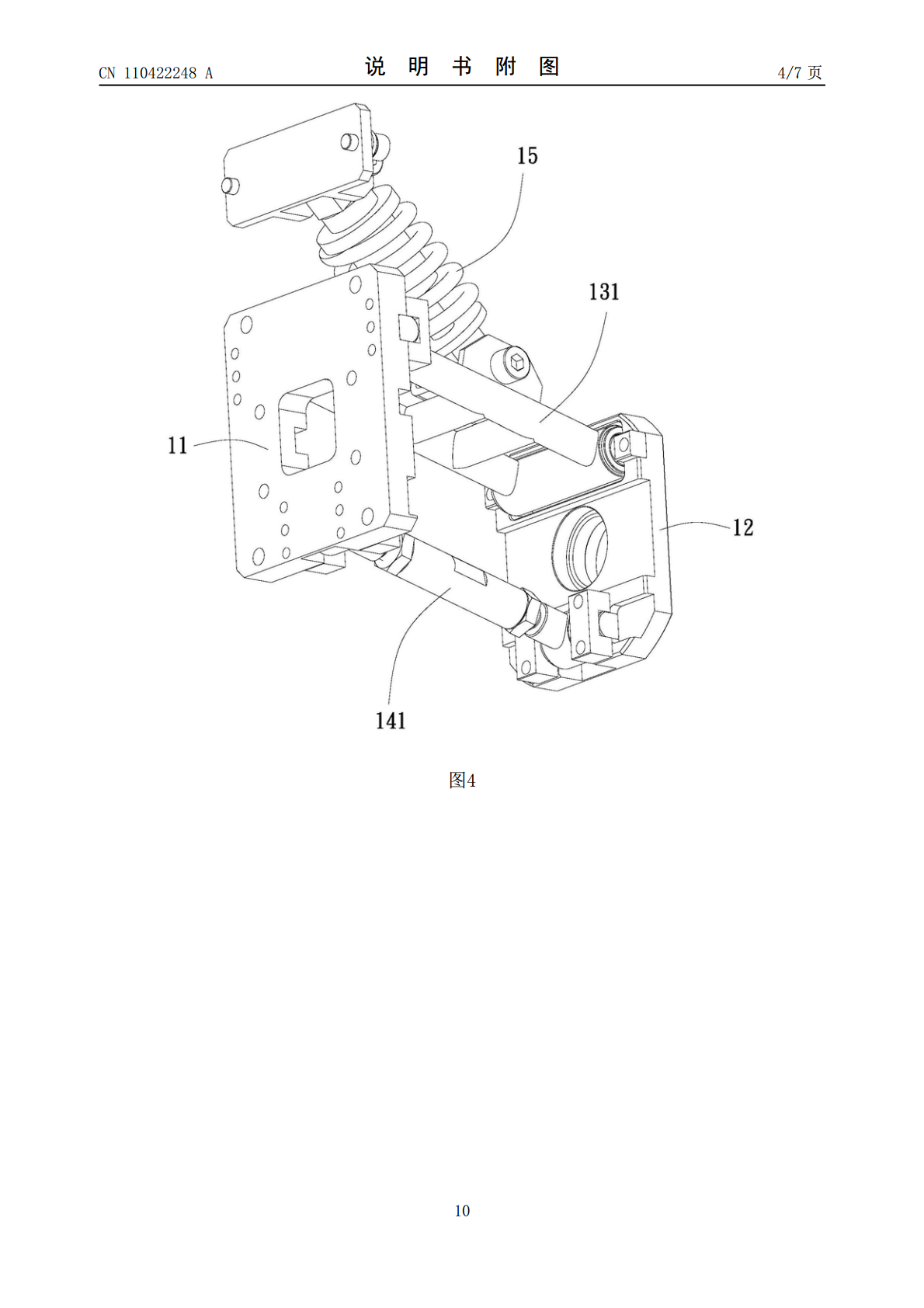
本发明涉及一种悬挂驱动装置,包括:悬挂组件,包括呈车架连接板与承载板、及第一摇臂与第二摇臂;车架连接板用于固定连接车架,第一摇臂与第二摇臂呈平行间隔设置;第一摇臂的一端铰接车架连接板,另一端铰接承载板;第二摇臂的一端铰接车架连接板,另一端铰接承载板;及传动组件,包括万向节、输出轴及输入轴。上述悬挂驱动装置,结构简单,第一摇臂与第二摇臂分别铰接于车架连接板与承载板上形成悬挂,传动组件穿过车架连接板与承载板,且输出轴22用于连接轮胎第一摇臂与第二摇臂发生摆动来减轻轮胎带来的震动,能提供有效的减震,增强车架的平
电车驱动悬挂装置.pdf
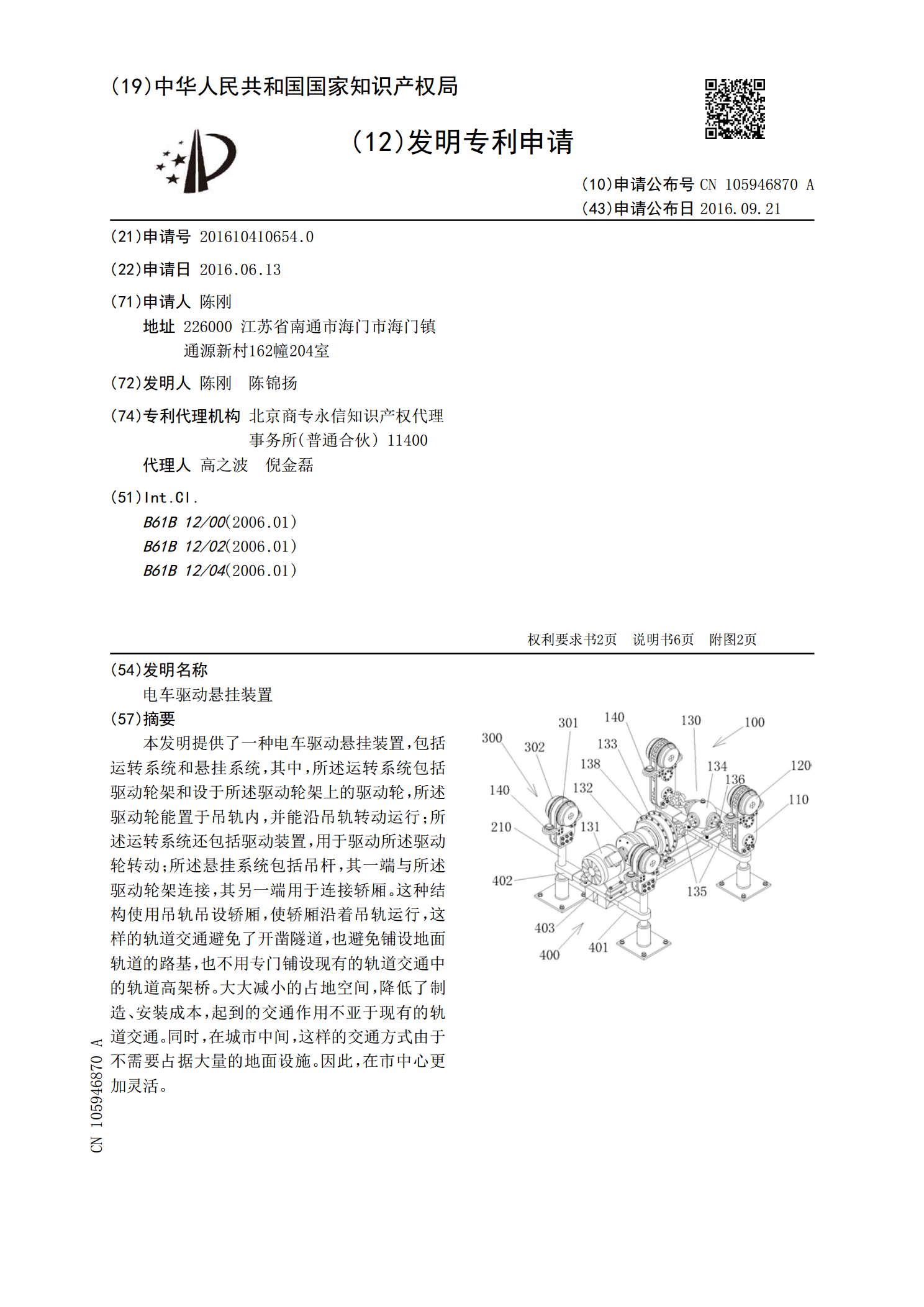
本发明提供了一种电车驱动悬挂装置,包括运转系统和悬挂系统,其中,所述运转系统包括驱动轮架和设于所述驱动轮架上的驱动轮,所述驱动轮能置于吊轨内,并能沿吊轨转动运行;所述运转系统还包括驱动装置,用于驱动所述驱动轮转动;所述悬挂系统包括吊杆,其一端与所述驱动轮架连接,其另一端用于连接轿厢。这种结构使用吊轨吊设轿厢,使轿厢沿着吊轨运行,这样的轨道交通避免了开凿隧道,也避免铺设地面轨道的路基,也不用专门铺设现有的轨道交通中的轨道高架桥。大大减小的占地空间,降低了制造、安装成本,起到的交通作用不亚于现有的轨道交通。同

悬挂输送装置用驱动装置及驱动轨道系统.pdf
本发明为一种悬挂输送装置用驱动装置,包括驱动轮模块、通过连接件与驱动轮模块固定连接的行走轮模块以及行走轮模块下端设置的吊装板;驱动轮模块包括与连接件固定连接的第一安装板、倾斜设置于第一安装板左侧的第一驱动轮安装板、设置于第一安装板右侧的与第一驱动轮安装板相对应的第二驱动轮安装板,第一驱动轮安装板和第二驱动轮安装板上分别设置有相对应的两组驱动轮,驱动轮包括驱动轮安装架以及驱动轮安装架上设置的驱动轮轮体。本发明的一种悬挂输送装置用驱动装置的有益效果在于:通过设置驱动轮模块,驱动轮模块上的驱动轮轮体于驱动轴转动
可通过悬挂钢缆的驱动装置.pdf
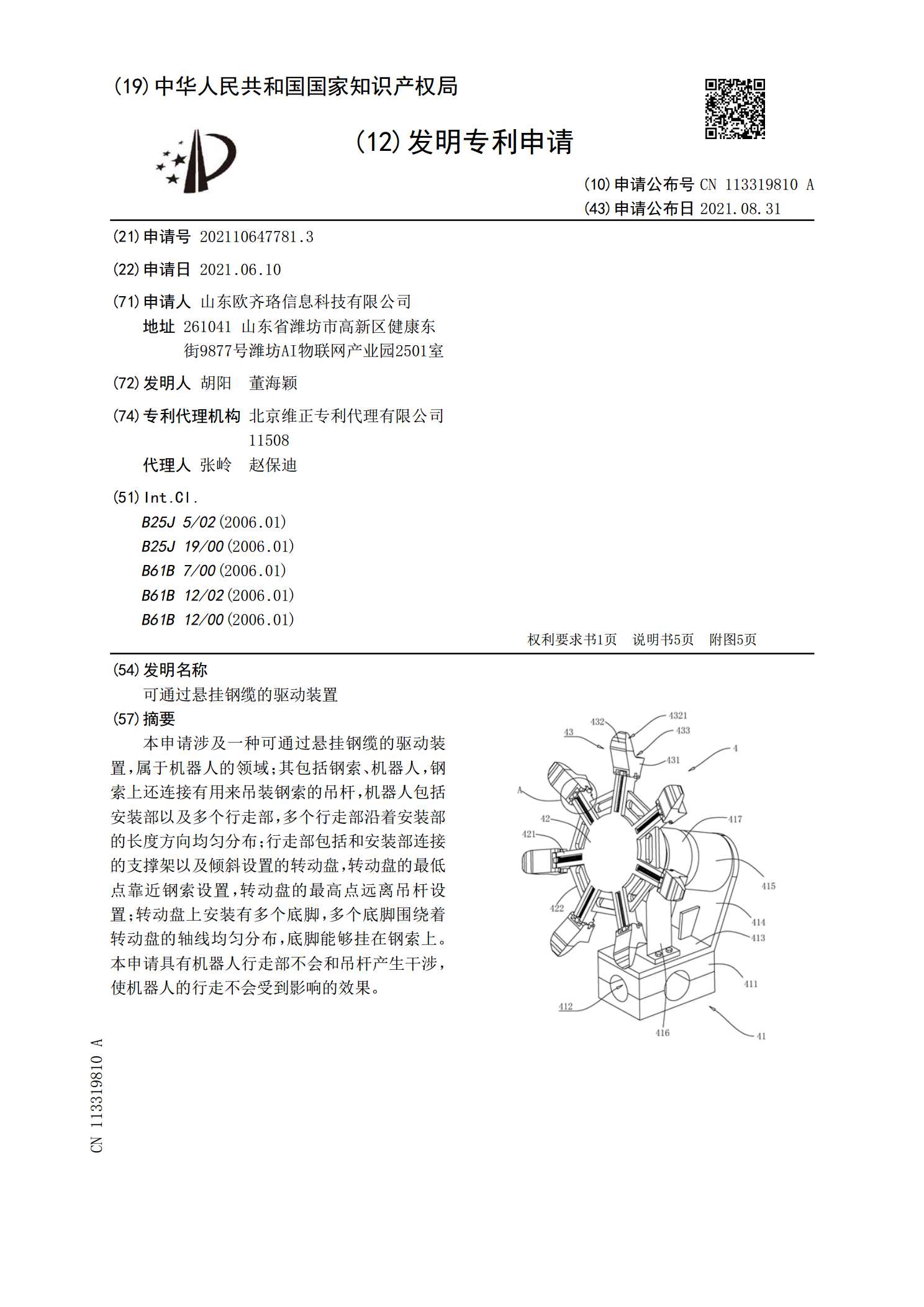
本申请涉及一种可通过悬挂钢缆的驱动装置,属于机器人的领域;其包括钢索、机器人,钢索上还连接有用来吊装钢索的吊杆,机器人包括安装部以及多个行走部,多个行走部沿着安装部的长度方向均匀分布;行走部包括和安装部连接的支撑架以及倾斜设置的转动盘,转动盘的最低点靠近钢索设置,转动盘的最高点远离吊杆设置;转动盘上安装有多个底脚,多个底脚围绕着转动盘的轴线均匀分布,底脚能够挂在钢索上。本申请具有机器人行走部不会和吊杆产生干涉,使机器人的行走不会受到影响的效果。

悬挂链四工位抛丸机的悬挂链驱动装置.pdf
本发明涉及一种悬挂链四工位抛丸机的悬挂链驱动装置,它包括固定于机架上的闭合环形的轨道,在轨道外侧的机架上固定有滚子链安装导轨,在滚子链安装导轨内设有第一滚子链,在第一滚子链上固定有前后两个第一传动块;在位于直道位置的轨道的内侧的机架上安装有往复张紧链轮与往复驱动链轮,在往复张紧链轮与往复驱动链轮上设有第二滚子链,在第二滚子链上固定有前后两个第二传动块,在靠近往复张紧链轮位置的机架上固定有呈楔形的挡板;在底板上固定有小车轴,在小车轴上转动安装有转座,在转座的底端部固定有自转链轮,在自转链轮上固定有吊钩,在吊