
一种跨运车防倾覆稳定性控制系统及方法.pdf

朋兴****en


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种跨运车防倾覆稳定性控制系统及方法.pdf
本发明公开了一种跨运车防倾覆稳定性控制系统与方法,包括转弯稳定性模块,依据风速、坡度条件,在载荷、起升高度位置一定时,计算转弯速度与转弯半径之间的关系,作出数据库,用拉格朗日拟合函数拟合出转弯速度和转弯半径的曲线,并用龙格现象的优化滤波处理;刹车制动稳定性模块,依据风速、坡度条件,在满载、起升高度在最高点且全速行驶时急刹车,通过控制减速制动时间,结合考虑车辆每轮的轮压状态,判别车辆是否稳定;控制模块,对比转弯稳定性模块和刹车制动稳定性模块的实时参数,并最终结合转弯稳定性模块和刹车制动稳定性模块的参数控制。
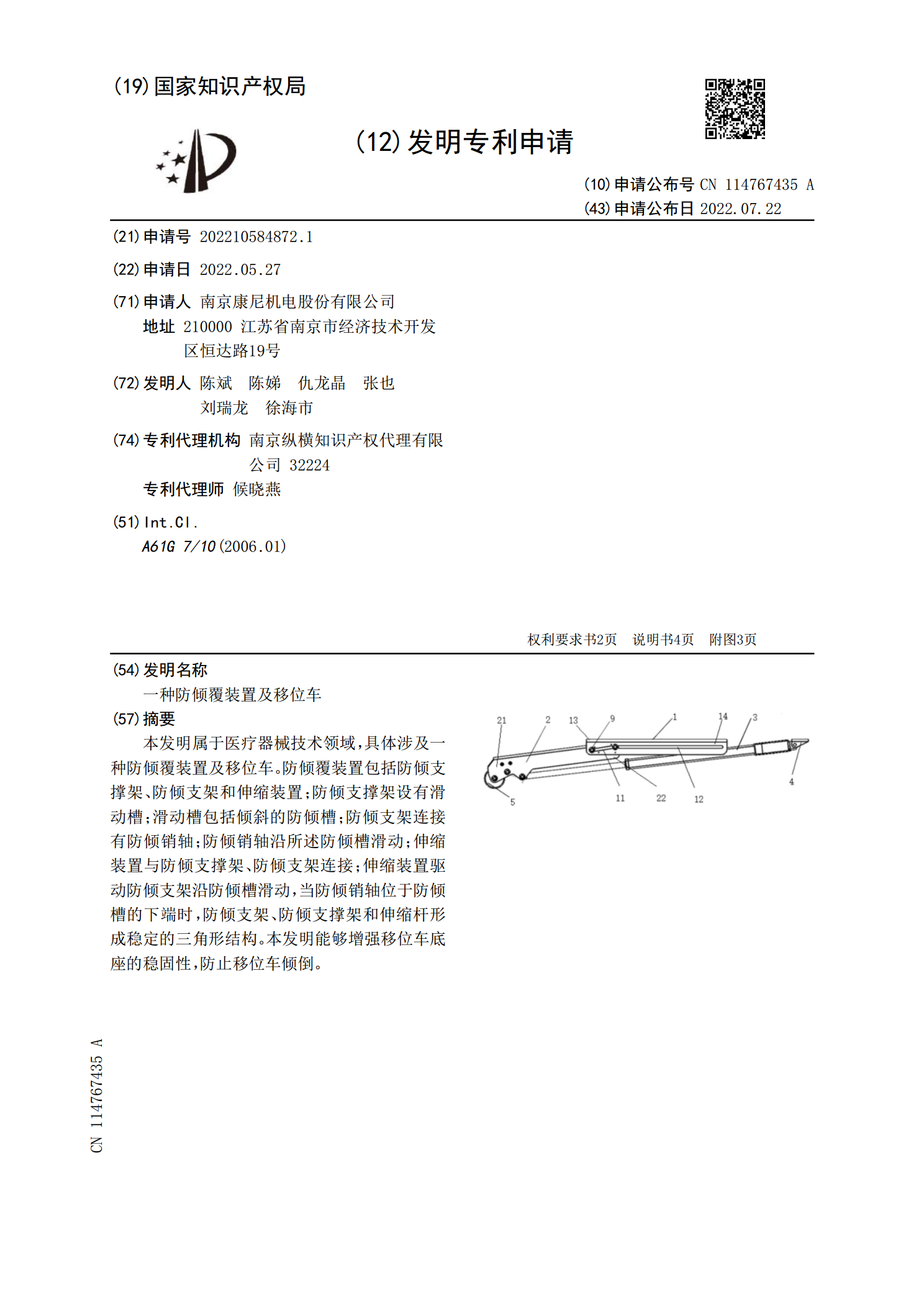
一种防倾覆装置及移位车.pdf
本发明属于医疗器械技术领域,具体涉及一种防倾覆装置及移位车。防倾覆装置包括防倾支撑架、防倾支架和伸缩装置;防倾支撑架设有滑动槽;滑动槽包括倾斜的防倾槽;防倾支架连接有防倾销轴;防倾销轴沿所述防倾槽滑动;伸缩装置与防倾支撑架、防倾支架连接;伸缩装置驱动防倾支架沿防倾槽滑动,当防倾销轴位于防倾槽的下端时,防倾支架、防倾支撑架和伸缩杆形成稳定的三角形结构。本发明能够增强移位车底座的稳固性,防止移位车倾倒。
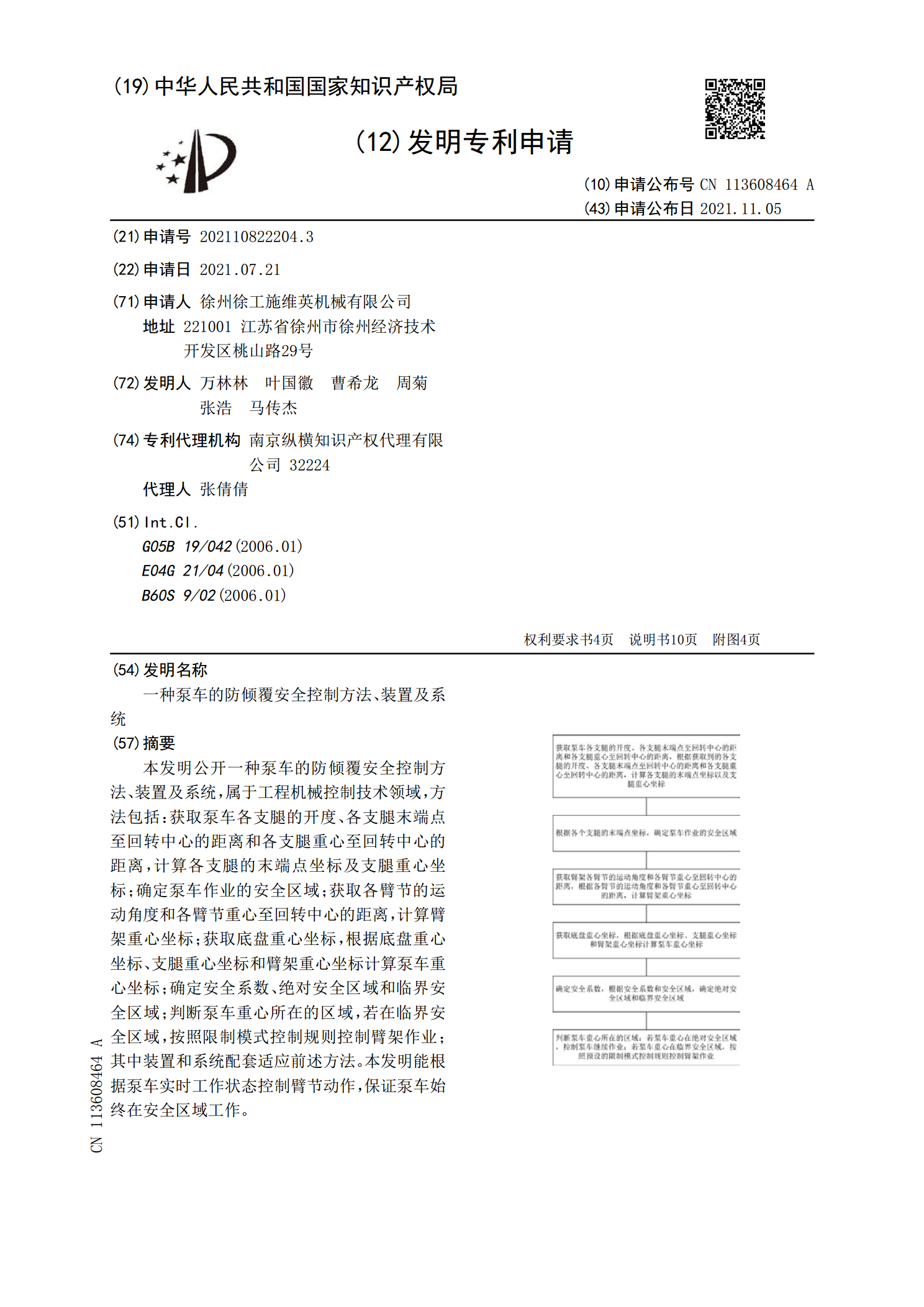
一种泵车的防倾覆安全控制方法、装置及系统.pdf
本发明公开一种泵车的防倾覆安全控制方法、装置及系统,属于工程机械控制技术领域,方法包括:获取泵车各支腿的开度、各支腿末端点至回转中心的距离和各支腿重心至回转中心的距离,计算各支腿的末端点坐标及支腿重心坐标;确定泵车作业的安全区域;获取各臂节的运动角度和各臂节重心至回转中心的距离,计算臂架重心坐标;获取底盘重心坐标,根据底盘重心坐标、支腿重心坐标和臂架重心坐标计算泵车重心坐标;确定安全系数、绝对安全区域和临界安全区域;判断泵车重心所在的区域,若在临界安全区域,按照限制模式控制规则控制臂架作业;其中装置和系统

跨运车.pdf
一种跨运车,其包括:框架(10),其具有相对的大致平行侧(12,14)并且被构造来横跨将在所述相对侧之间起吊和运送的集装箱。跨运车具有三个支地轮(24,26)和(28)以使框架能定位在所述集装箱上方。所述支地轮包括:第一支地轮(24),其至少大致设置在所述框架一侧(12)的中心;和第二支地轮(26)和第三支地轮(28),其设置在所述框架另一侧(14)的相对末端上。所述第二轮(26)和所述第三轮(28)可以通过围绕相应的大致垂直轴(40,42)旋转而转向。

一种适用于无人驾驶跨运车的循迹控制系统和方法.pdf
本发明提供了一种可用于无人驾驶跨运车的循迹控制系统和方法,以解决八轮无人跨运车在箱区和箱区外导航以及不同方向行驶的精准循迹控制。其中在判断所述跨运车的作业区域在箱区外,决定所述跨运车采取八轮转动控制模式,且在判断所述跨运车的作业区域在箱区内,决定所述跨运车采取六轮转动控制模式,其中在所述八轮转动控制模式下,所述跨运车的八个轮子转动,在所述六轮转动控制模式下,所述跨运车的前六个轮子转动,后六个轮子不动。