
一种泵车的防倾覆安全控制方法、装置及系统.pdf

是你****馨呀


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种泵车的防倾覆安全控制方法、装置及系统.pdf
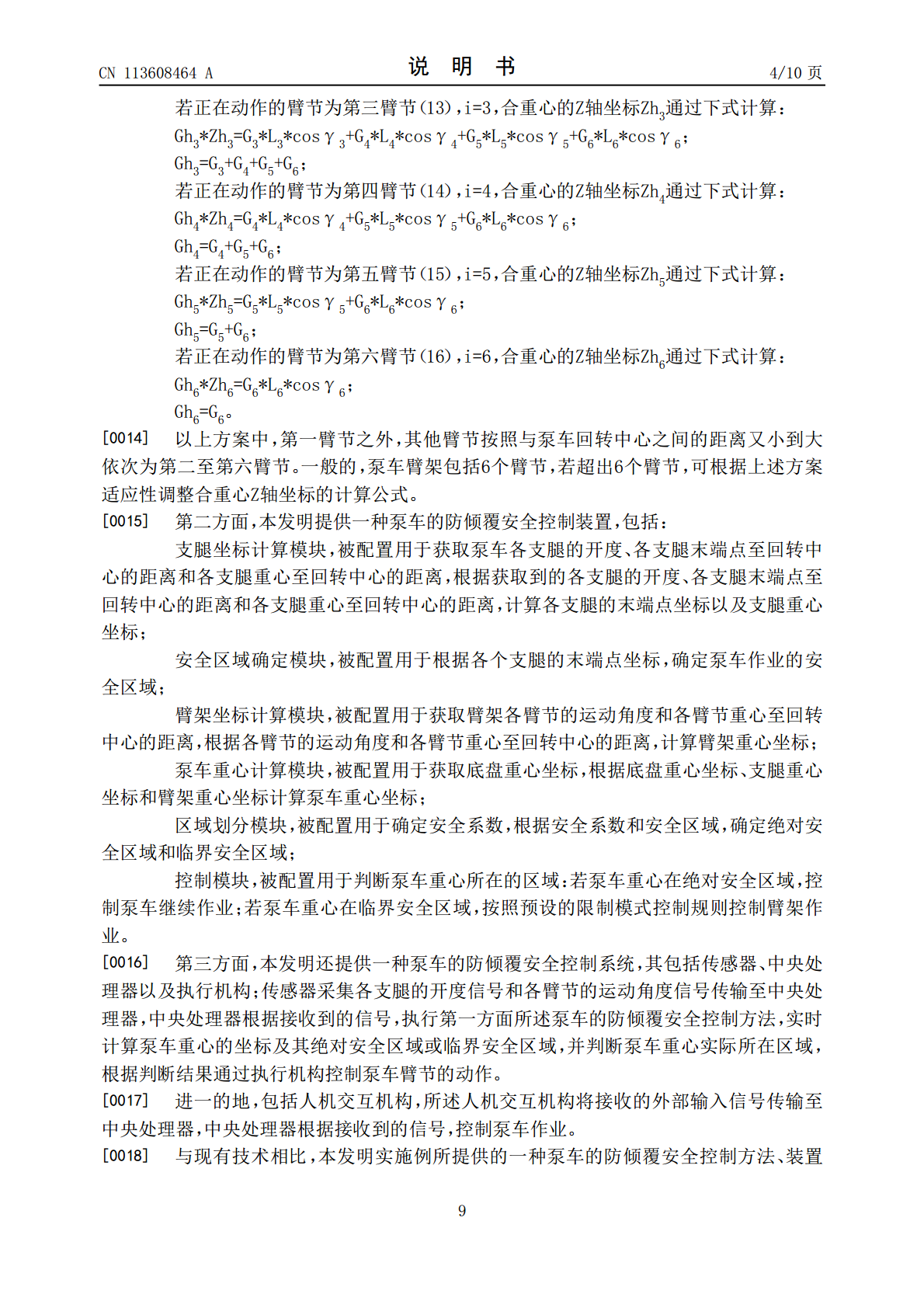
本发明公开一种泵车的防倾覆安全控制方法、装置及系统,属于工程机械控制技术领域,方法包括:获取泵车各支腿的开度、各支腿末端点至回转中心的距离和各支腿重心至回转中心的距离,计算各支腿的末端点坐标及支腿重心坐标;确定泵车作业的安全区域;获取各臂节的运动角度和各臂节重心至回转中心的距离,计算臂架重心坐标;获取底盘重心坐标,根据底盘重心坐标、支腿重心坐标和臂架重心坐标计算泵车重心坐标;确定安全系数、绝对安全区域和临界安全区域;判断泵车重心所在的区域,若在临界安全区域,按照限制模式控制规则控制臂架作业;其中装置和系统
一种混凝土泵车防倾覆预警方法和装置.pdf
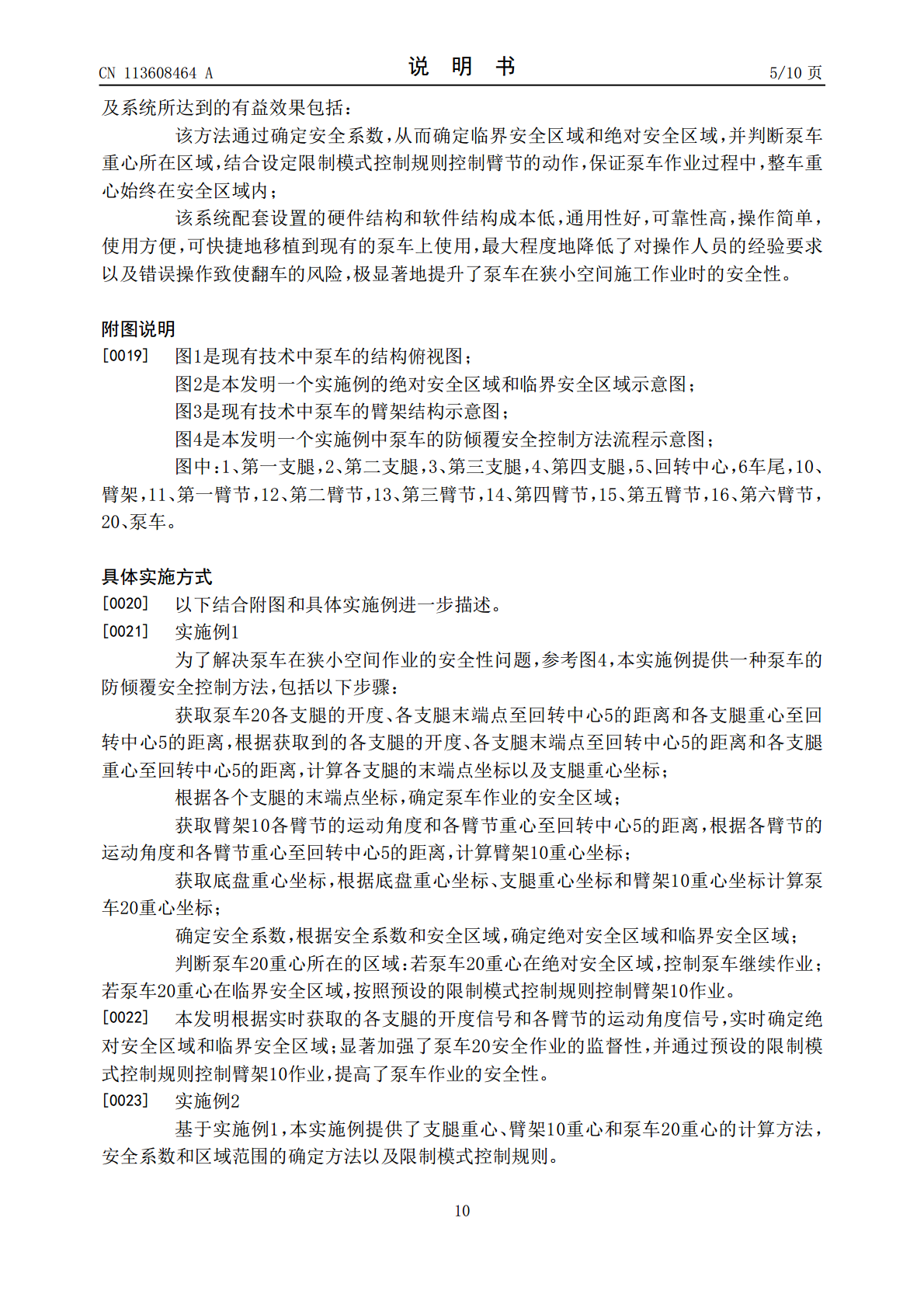
本发明提供一种混凝土泵车防倾覆预警方法和装置,步骤一、检查泵车的支撑状态,若泵车处于三腿支撑的状态,则执行以下的步骤;步骤二、确定由混凝土泵车三条支腿支点所围成的三角形;步骤三、确定混凝土泵车的重心安全区域;步骤四、测量混凝土泵车三条支腿的支撑力;步骤五、根据测量得到的混凝土泵车三条支腿的支撑力,求混凝土泵车的重心;步骤六、判断混凝土泵车的重心是否在混凝土泵车的重心安全区域内,若混凝土泵车的重心在混凝土泵车的重心安全区域内,则继续执行步骤四,若混凝土泵车的重心不在混凝土泵车的重心安全区域内,则发出预警并限
一种防倾覆装置及移位车.pdf
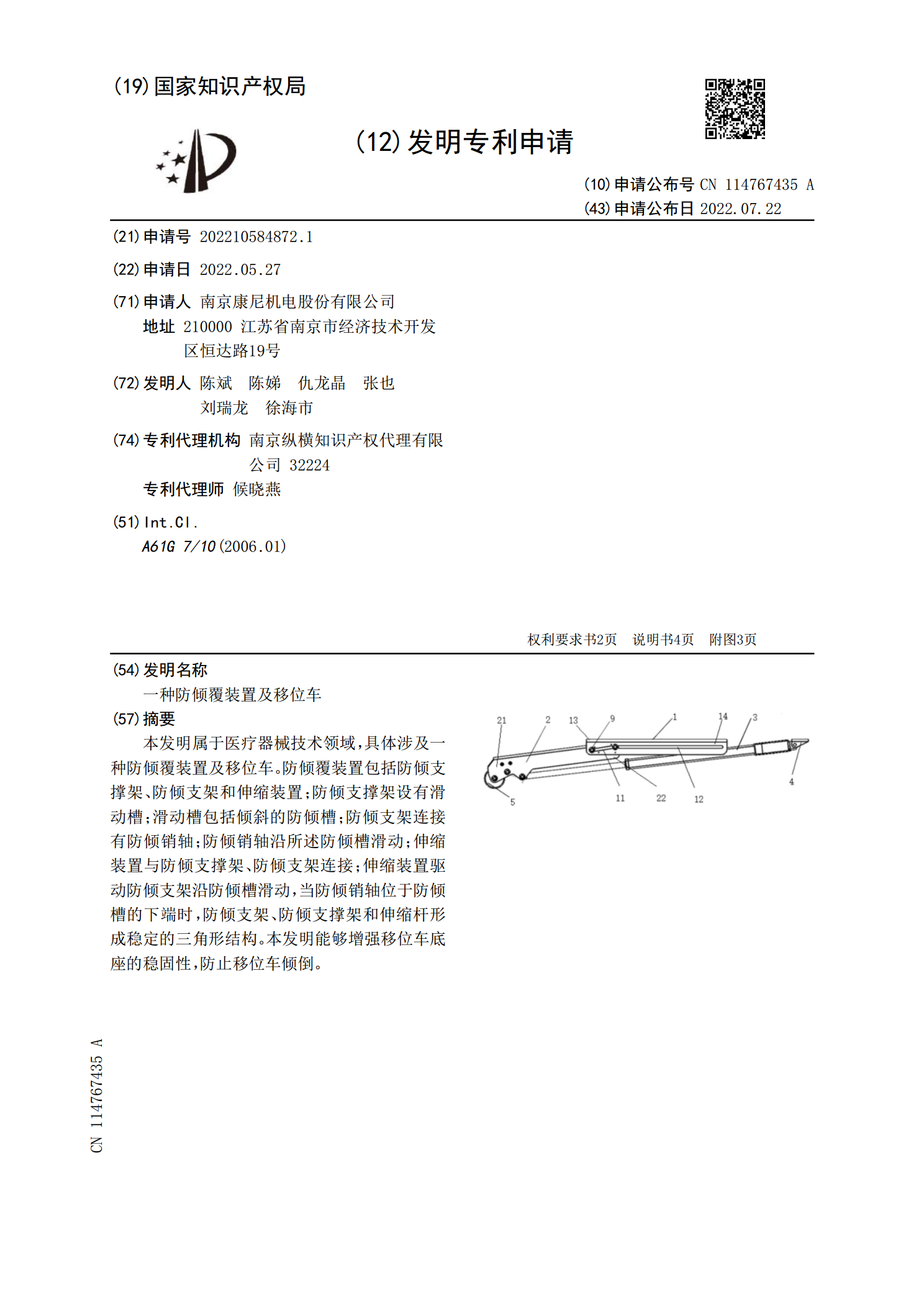
本发明属于医疗器械技术领域,具体涉及一种防倾覆装置及移位车。防倾覆装置包括防倾支撑架、防倾支架和伸缩装置;防倾支撑架设有滑动槽;滑动槽包括倾斜的防倾槽;防倾支架连接有防倾销轴;防倾销轴沿所述防倾槽滑动;伸缩装置与防倾支撑架、防倾支架连接;伸缩装置驱动防倾支架沿防倾槽滑动,当防倾销轴位于防倾槽的下端时,防倾支架、防倾支撑架和伸缩杆形成稳定的三角形结构。本发明能够增强移位车底座的稳固性,防止移位车倾倒。

一种用于泵车的水平控制装置、泵车及泵车水平控制方法.pdf
本发明公开了一种用于泵车的水平控制装置、泵车及泵车水平控制方法,该水平控制装置包括有倾角传感器、控制器、支腿多路阀、压力传感器及电磁控制阀,所述倾角传感器水平安装在底架支腿系统上,所述倾角传感器与所述控制器电连接,所述控制器与所述支腿多路阀电连接,所述压力传感器设置在所述支腿多路阀上用于检测工作油压信号,所述电磁控制阀与所述控制器电连接,所述压力传感器与所述控制器电连接,所述支腿多路阀设置在所述底架支腿系统上,该发明能实时检测支撑架水平倾角的变化且能够自动调整倾角,防止了在工作过程中造成倾翻。

一种跨运车防倾覆稳定性控制系统及方法.pdf
本发明公开了一种跨运车防倾覆稳定性控制系统与方法,包括转弯稳定性模块,依据风速、坡度条件,在载荷、起升高度位置一定时,计算转弯速度与转弯半径之间的关系,作出数据库,用拉格朗日拟合函数拟合出转弯速度和转弯半径的曲线,并用龙格现象的优化滤波处理;刹车制动稳定性模块,依据风速、坡度条件,在满载、起升高度在最高点且全速行驶时急刹车,通过控制减速制动时间,结合考虑车辆每轮的轮压状态,判别车辆是否稳定;控制模块,对比转弯稳定性模块和刹车制动稳定性模块的实时参数,并最终结合转弯稳定性模块和刹车制动稳定性模块的参数控制。