
电驱动车轮、传动和控制模块、套件、车辆以及系统.pdf

努力****冰心


1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电驱动车轮、传动和控制模块、套件、车辆以及系统.pdf
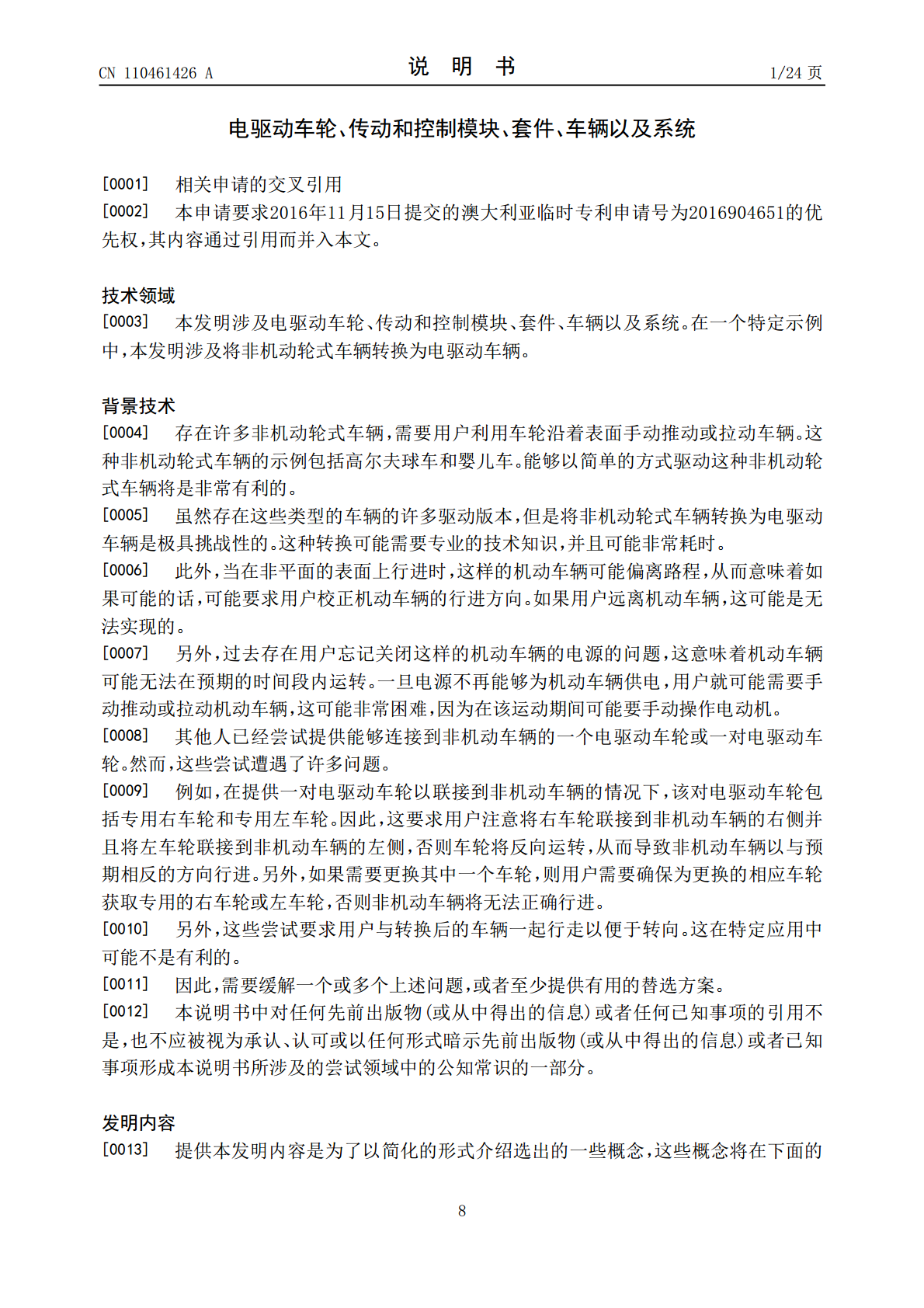
公开了电驱动车轮、传动和控制模块、套件、车辆以及系统。电驱动车轮(100)设置成可释放地联接到非机动轮式车辆。所述电驱动车轮(100)包括:地面接合组件(110);联接组件(125),其用于将所述电驱动车轮可释放地联接到车辆(2700)的车轴(2000);以及壳体(1902),其设置为容纳:电动机(560),其可操作地联接到所述地面接合组件(110);控制系统(505),其包括惯性测量单元(540)和控制器(510)或者联接到惯性测量单元(540)和控制器(510),所述惯性测量单元(540)在电驱动车轮

电驱动模块、混合动力驱动系统和车辆.pdf
本发明涉及电驱动模块、混合动力驱动系统和车辆。公开了一种用于混合动力驱动系统的电驱动模块,其中,所述混合动力驱动系统包括内燃机和变速装置,所述电驱动模块设置在所述内燃机和所述变速装置之间,所述变速装置能够选择将所述电驱动模块的电动机的扭矩和内燃机的扭矩在所述变速装置的输入轴耦合或者在所述变速装置的输出轴耦合,其中,所述电驱动模块包括:电动机,其包括转子和定子;输入轴,其用于连接到所述内燃机;离合器装置,其连接到所述输入轴;第一输出轴,其连接到所述离合器装置;第二输出轴,其抗扭连接到所述转子;和壳体,所述电
车辆传动装置、车辆驱动系统和车辆.pdf
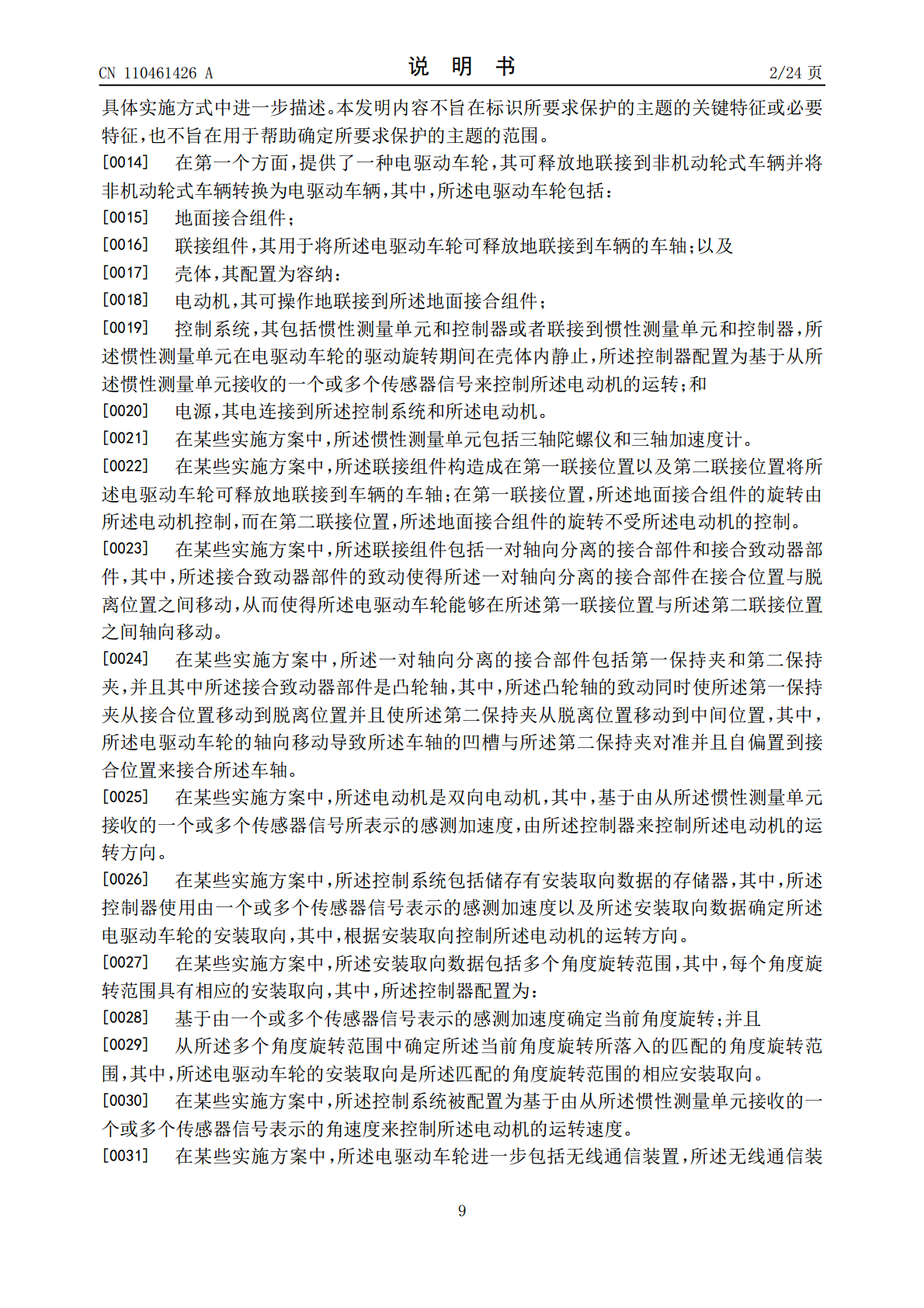
本发明公开了一种车辆传动装置、车辆驱动系统和车辆,所述车辆传动装置包括减速机构,所述减速机构包括:输入齿轮、输出齿轮和传动齿圈,所述输入齿轮适于与动力源相连,所述输出齿轮用于输出动力;第一分流齿轮组、第二分流齿轮组,所述输入齿轮、所述输出齿轮、所述第一分流齿轮组和所述第二分流齿轮组均布置在所述传动齿圈内,所述第一分流齿轮组与所述输入齿轮及所述传动齿圈啮合,所述第二分流齿轮组与所述输入齿轮及所述传动齿圈啮合,所述输出齿轮与所述传动齿圈啮合。本发明的车辆传动装置,第一分流齿轮组和第二分流齿轮组可对输入齿轮输入
车辆传动装置、车辆驱动系统和车辆.pdf
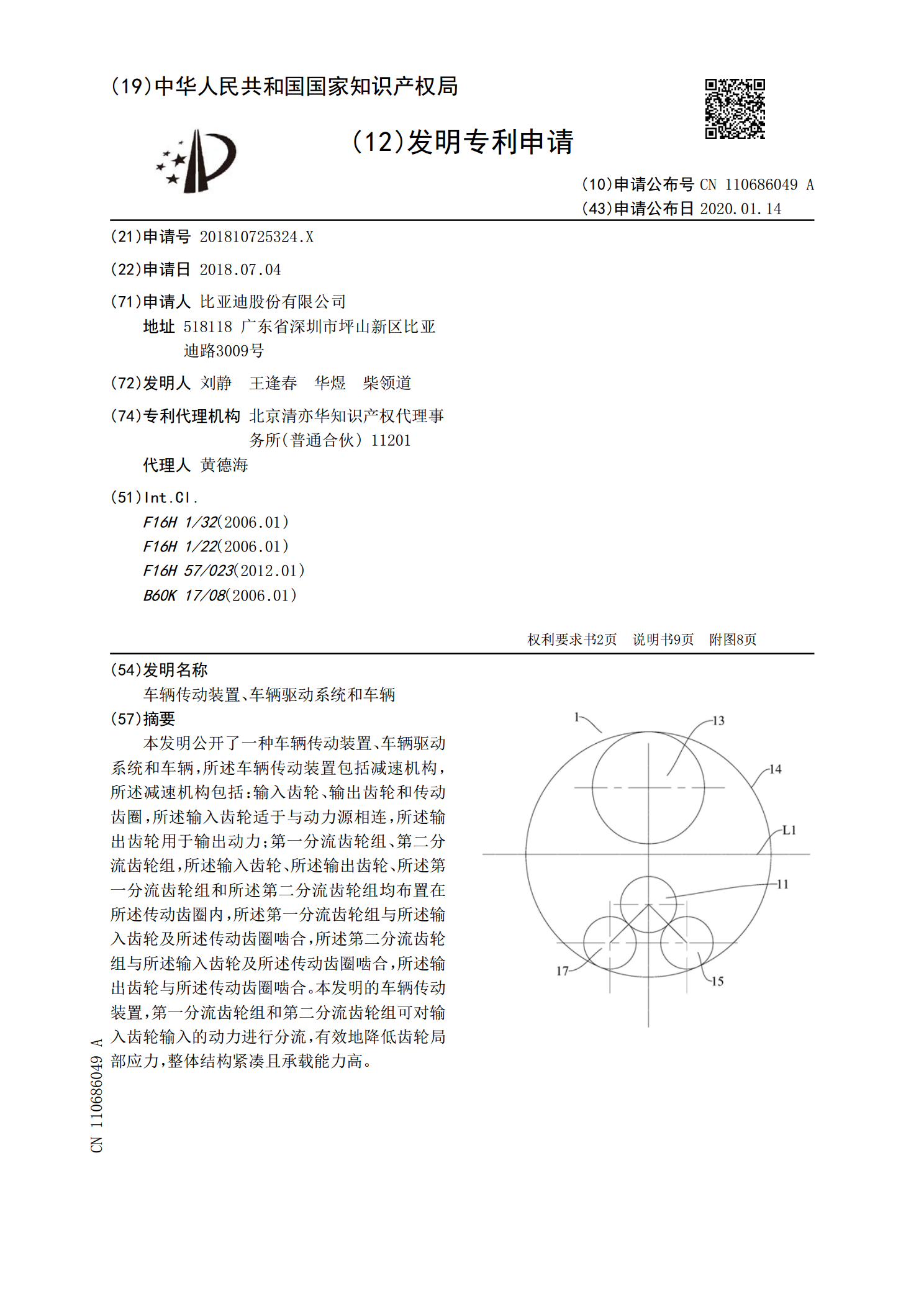
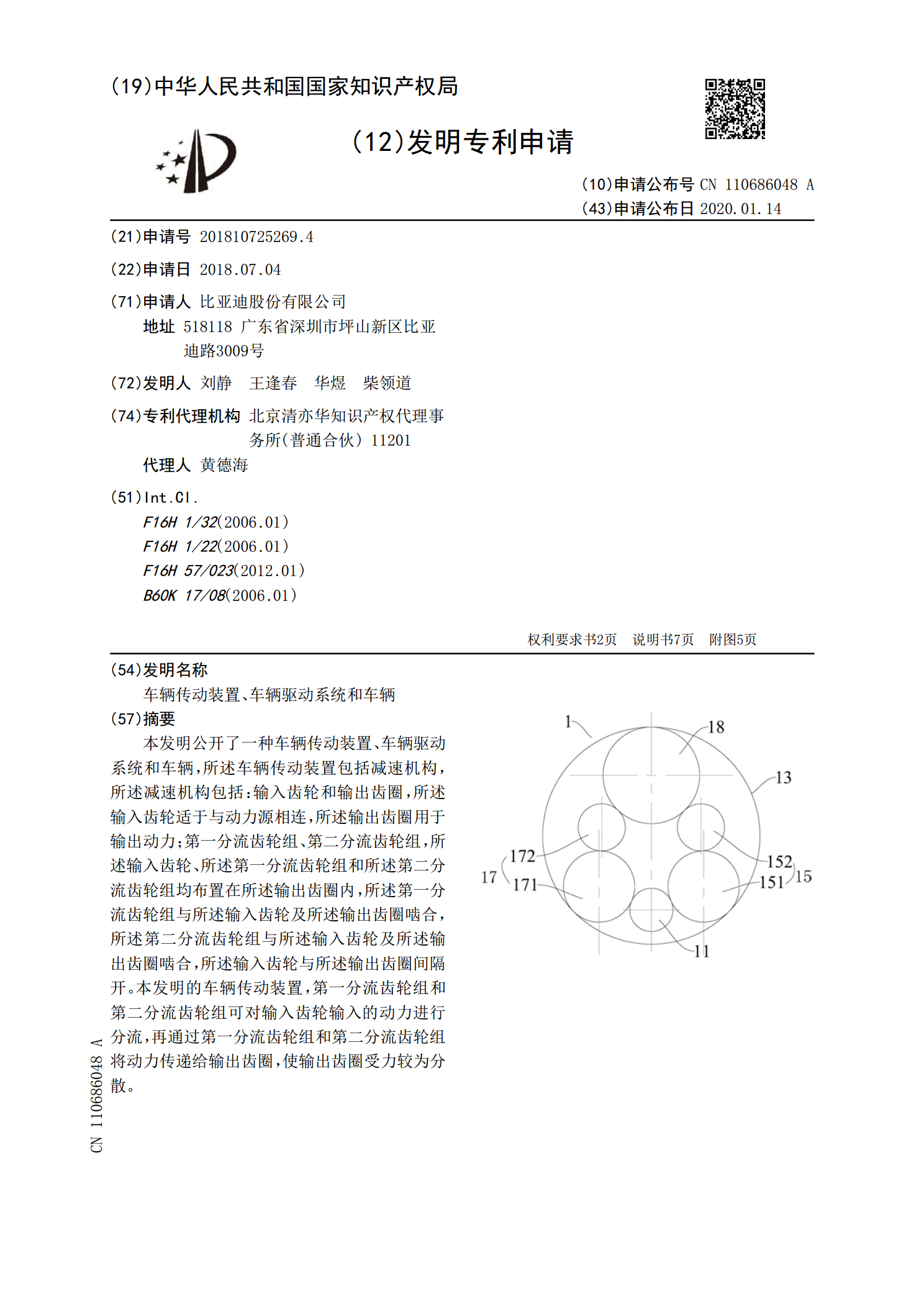
本发明公开了一种车辆传动装置、车辆驱动系统和车辆,所述车辆传动装置包括减速机构,所述减速机构包括:输入齿轮和输出齿圈,所述输入齿轮适于与动力源相连,所述输出齿圈用于输出动力;第一分流齿轮组、第二分流齿轮组,所述输入齿轮、所述第一分流齿轮组和所述第二分流齿轮组均布置在所述输出齿圈内,所述第一分流齿轮组与所述输入齿轮及所述输出齿圈啮合,所述第二分流齿轮组与所述输入齿轮及所述输出齿圈啮合,所述输入齿轮与所述输出齿圈间隔开。本发明的车辆传动装置,第一分流齿轮组和第二分流齿轮组可对输入齿轮输入的动力进行分流,再通过
车辆传动装置、车辆驱动系统和车辆.pdf
本发明公开了一种车辆传动装置、车辆驱动系统和车辆,所述车辆传动装置包括减速机构,所述减速机构包括:输入齿轮和输出齿圈,所述输入齿轮适于与动力源相连,所述输出齿圈用于输出动力;第一分流齿轮组、第二分流齿轮组,所述输入齿轮、所述第一分流齿轮组和所述第二分流齿轮组均布置在所述输出齿圈内,所述第一分流齿轮组与所述输入齿轮及所述输出齿圈啮合,所述第二分流齿轮组与所述输入齿轮及所述输出齿圈啮合,所述输入齿轮与所述输出齿圈间隔开。本发明的车辆传动装置,第一分流齿轮组和第二分流齿轮组可对输入齿轮输入的动力进行分流,再通过