
非标模数谐波齿轮的修型方法.pdf

秀美****甜v

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
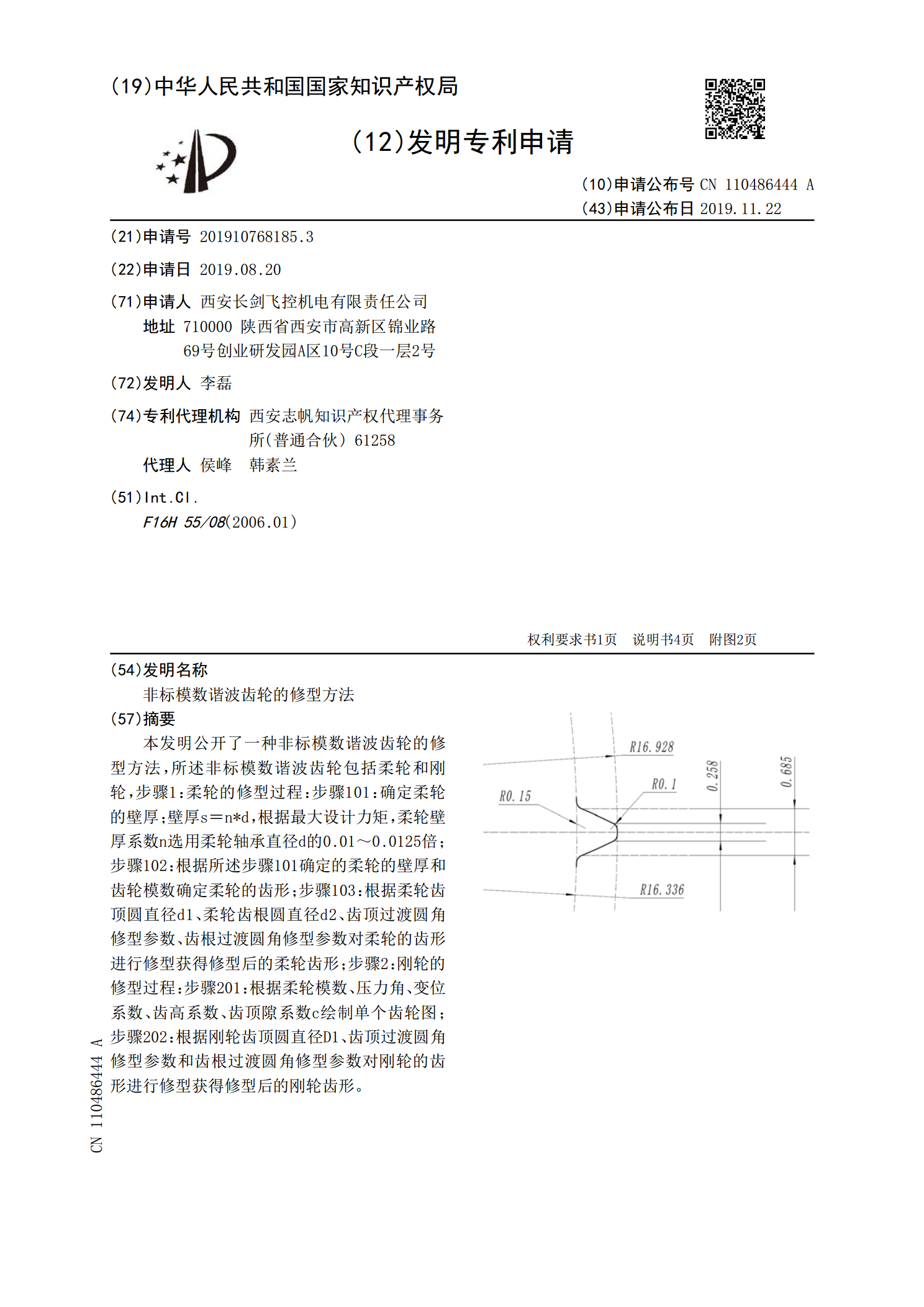
非标模数谐波齿轮的修型方法.pdf
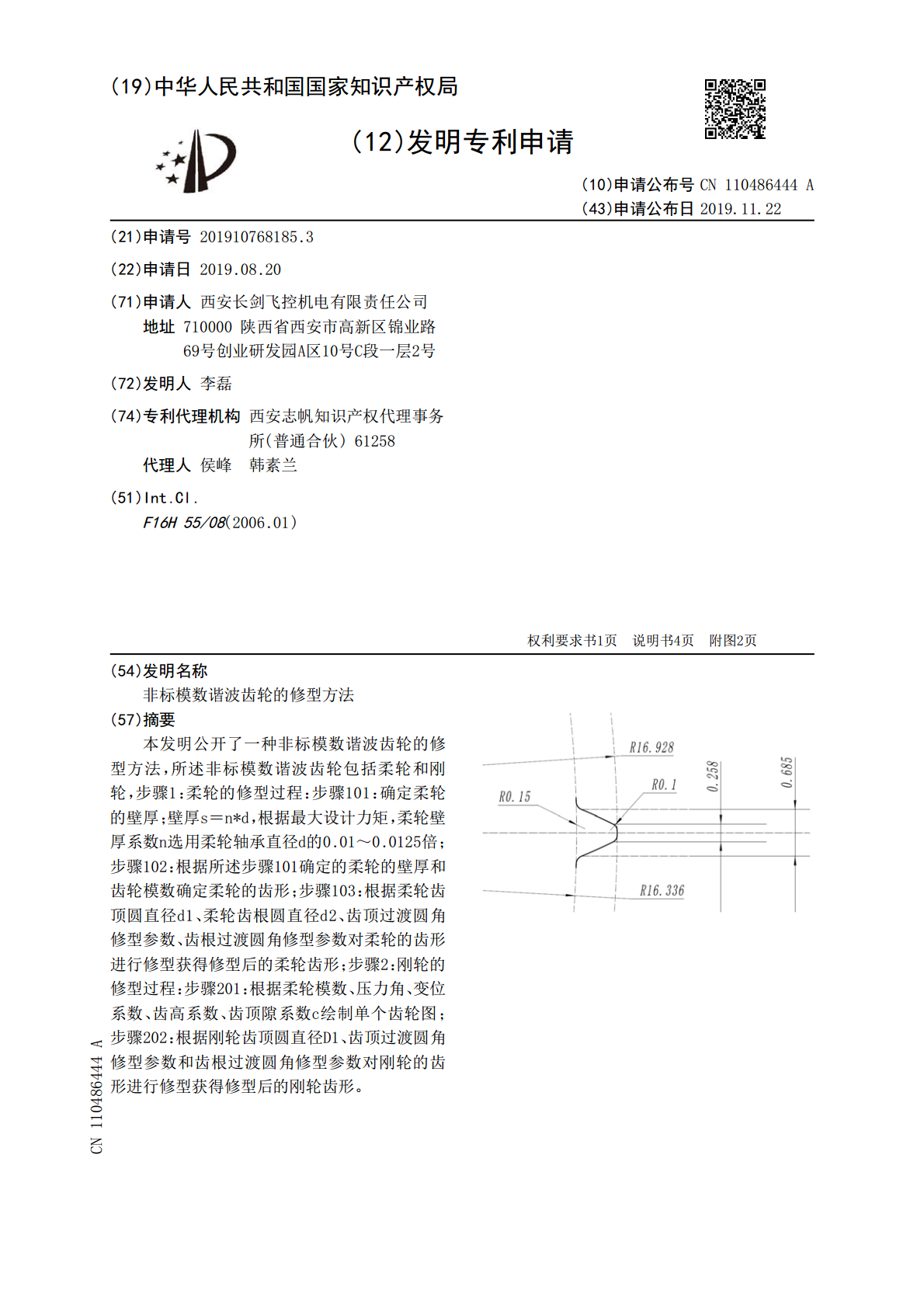
本发明公开了一种非标模数谐波齿轮的修型方法,所述非标模数谐波齿轮包括柔轮和刚轮,步骤1:柔轮的修型过程:步骤101:确定柔轮的壁厚;壁厚s=n*d,根据最大设计力矩,柔轮壁厚系数n选用柔轮轴承直径d的0.01~0.0125倍;步骤102:根据所述步骤101确定的柔轮的壁厚和齿轮模数确定柔轮的齿形;步骤103:根据柔轮齿顶圆直径d1、柔轮齿根圆直径d2、齿顶过渡圆角修型参数、齿根过渡圆角修型参数对柔轮的齿形进行修型获得修型后的柔轮齿形;步骤2:刚轮的修型过程:步骤201:根据柔轮模数、压力角、变位系数、齿高
渐开线谐波齿轮的修形方法及谐波减速器.pdf
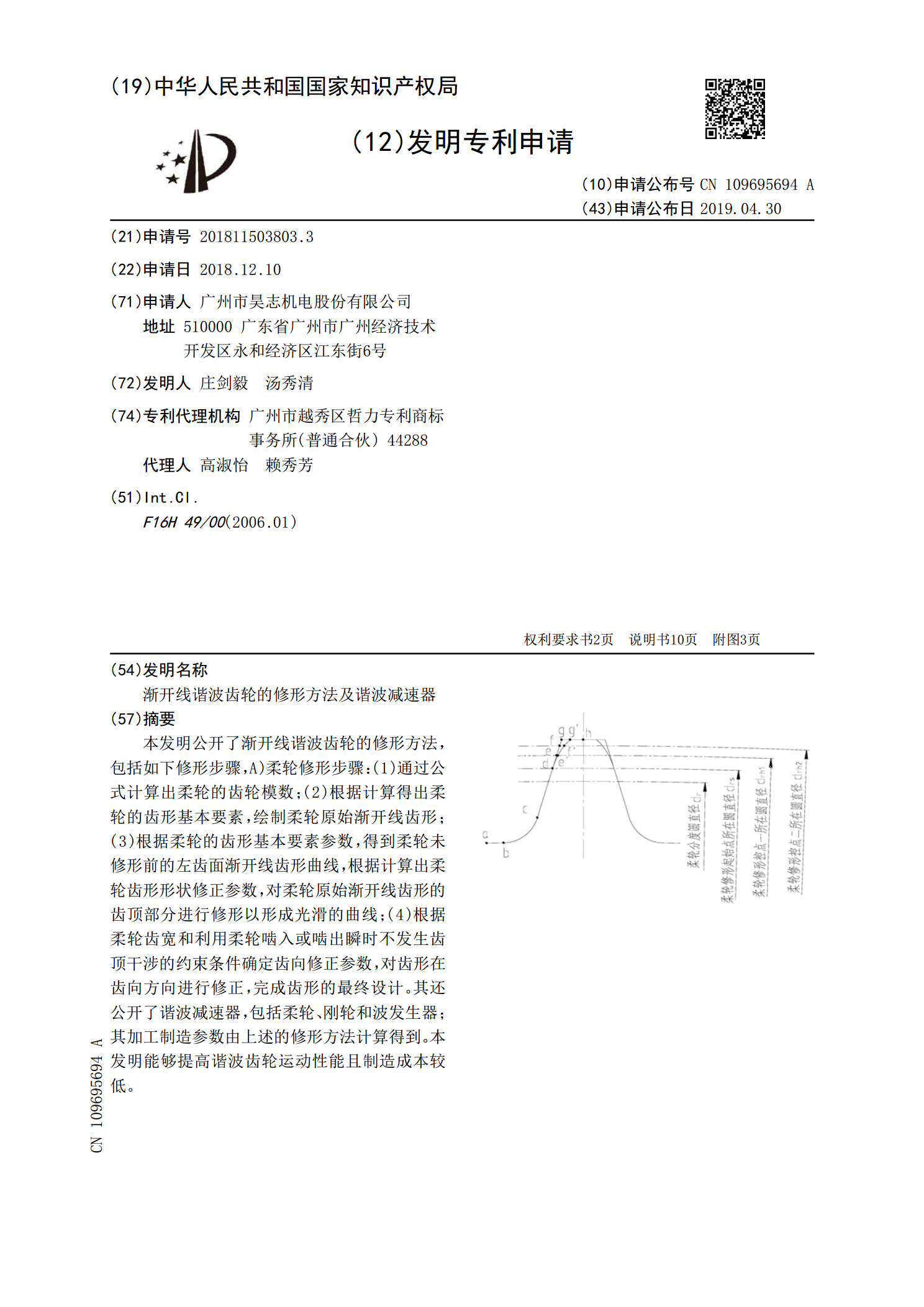
本发明公开了渐开线谐波齿轮的修形方法,包括如下修形步骤,A)柔轮修形步骤:(1)通过公式计算出柔轮的齿轮模数;(2)根据计算得出柔轮的齿形基本要素,绘制柔轮原始渐开线齿形;(3)根据柔轮的齿形基本要素参数,得到柔轮未修形前的左齿面渐开线齿形曲线,根据计算出柔轮齿形形状修正参数,对柔轮原始渐开线齿形的齿顶部分进行修形以形成光滑的曲线;(4)根据柔轮齿宽和利用柔轮啮入或啮出瞬时不发生齿顶干涉的约束条件确定齿向修正参数,对齿形在齿向方向进行修正,完成齿形的最终设计。其还公开了谐波减速器,包括柔轮、刚轮和波发生器
谐波型线的齿轮式调压油泵.pdf
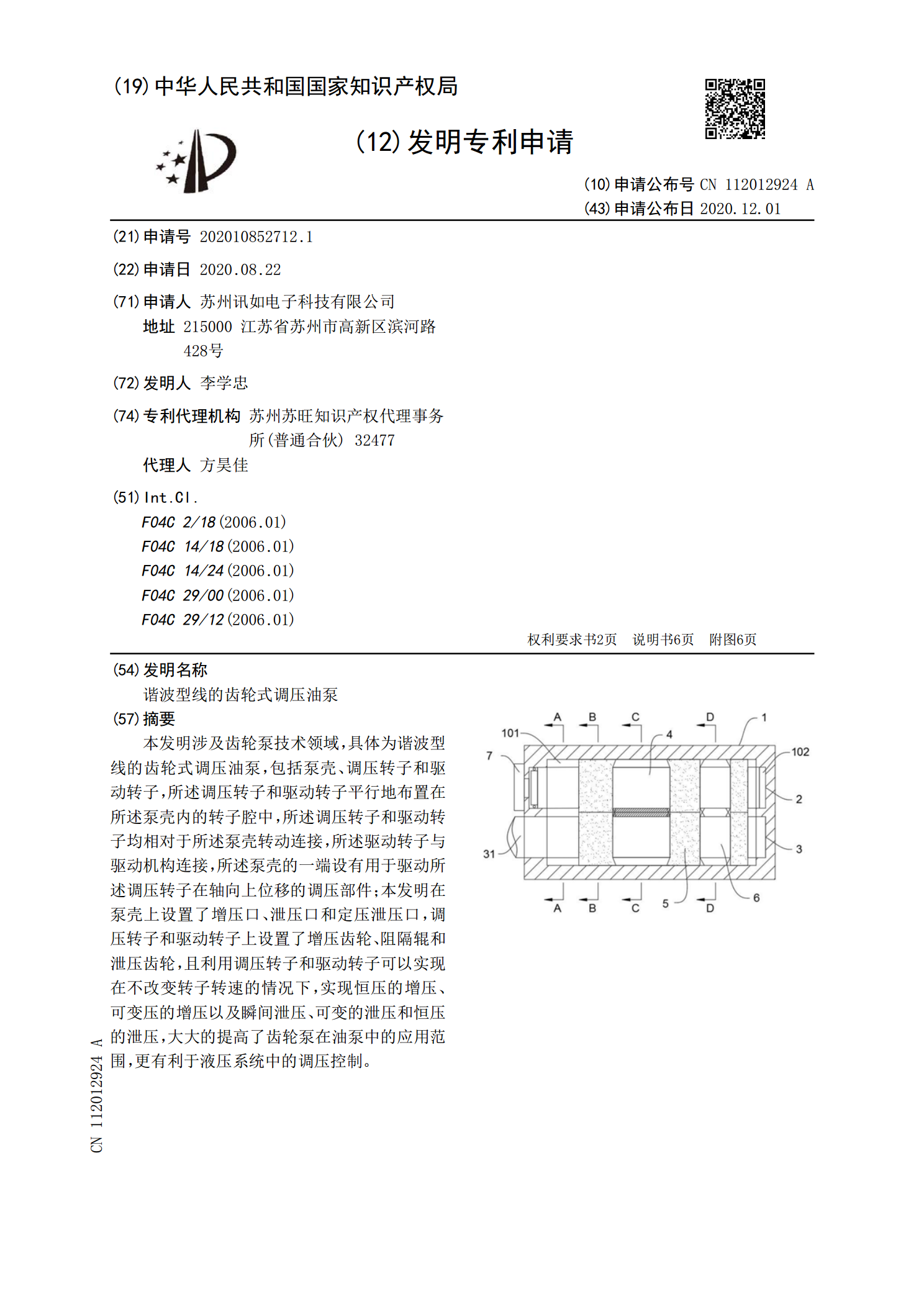
本发明涉及齿轮泵技术领域,具体为谐波型线的齿轮式调压油泵,包括泵壳、调压转子和驱动转子,所述调压转子和驱动转子平行地布置在所述泵壳内的转子腔中,所述调压转子和驱动转子均相对于所述泵壳转动连接,所述驱动转子与驱动机构连接,所述泵壳的一端设有用于驱动所述调压转子在轴向上位移的调压部件;本发明在泵壳上设置了增压口、泄压口和定压泄压口,调压转子和驱动转子上设置了增压齿轮、阻隔辊和泄压齿轮,且利用调压转子和驱动转子可以实现在不改变转子转速的情况下,实现恒压的增压、可变压的增压以及瞬间泄压、可变的泄压和恒压的泄压,大

非标铰刀修磨方法.pdf
本发明公开了一种非标铰刀的修磨方法,利用现有的普通的修磨设备砂轮,经刀具安装、调节砂轮、刀具粗磨、刀具的外圆精磨、修磨第一后角留出刃带等步骤,即可实现对非标铰刀的修磨。该修磨方法能提高修磨质量,更好地保证修磨后铰刀的精度,不增加设备投入,实现刀具的重复利用,减少周转刀具的数量,节约生产成本。本发明适用于对非标铰刀的刃部修磨。
谐波齿轮.pdf
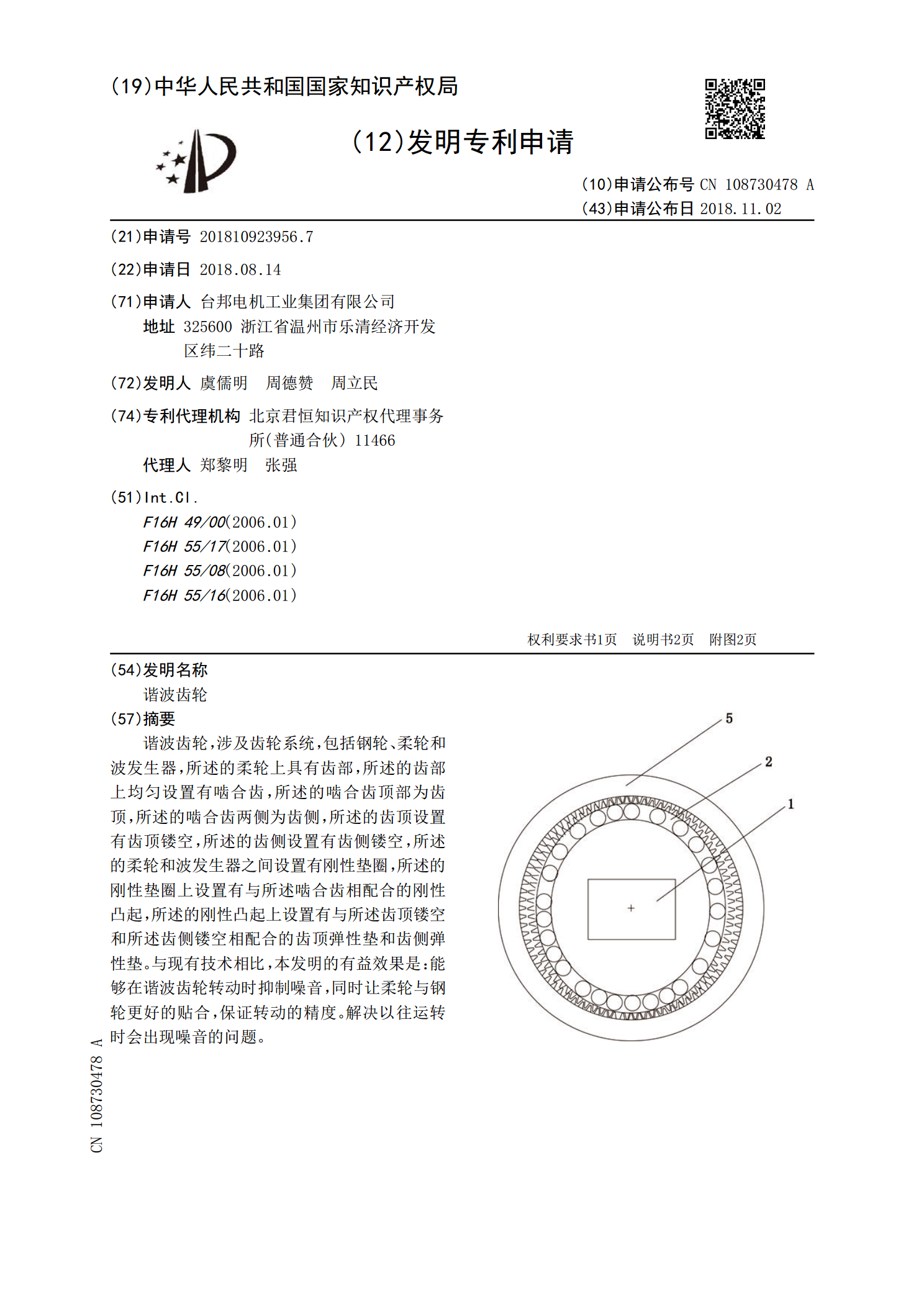
谐波齿轮,涉及齿轮系统,包括钢轮、柔轮和波发生器,所述的柔轮上具有齿部,所述的齿部上均匀设置有啮合齿,所述的啮合齿顶部为齿顶,所述的啮合齿两侧为齿侧,所述的齿顶设置有齿顶镂空,所述的齿侧设置有齿侧镂空,所述的柔轮和波发生器之间设置有刚性垫圈,所述的刚性垫圈上设置有与所述啮合齿相配合的刚性凸起,所述的刚性凸起上设置有与所述齿顶镂空和所述齿侧镂空相配合的齿顶弹性垫和齿侧弹性垫。与现有技术相比,本发明的有益效果是:能够在谐波齿轮转动时抑制噪音,同时让柔轮与钢轮更好的贴合,保证转动的精度。解决以往运转时会出现噪音